

2. Принцип возможных перемещений
Мех. сис-ма – мн-во точек, движение и положение которых зависит от движения и положения всех остальных.
Связи – условия, которые налагают ограничения либо только на положение (геом. связь), либо также и на скорость движения точек сис-мы (кинематическая связь).
Перемещения, совершаемые движущейся точкой за определённый промежуток времени и зависящие от закона движения будем называть истинными перемещениями.
![]()
Любое
элементарное перемещение, которое может
быть сообщено из занимаемого в дан. мом.
времени положения при сохранении
наложения на неё связей будем называть
виртуальными(возможными)
перемещениями.
![]()
Геом.
связи могут быть склерономными
(стационарными) и реономными
(нестационарными), а так же неосвобождающими
(которые точка покинуть не может) и
освобождающими(может покинуть). Пр-р:
 -
склерономн. неосвоб.
-
склерономн. неосвоб. -
реономн. освоб.
-
реономн. освоб.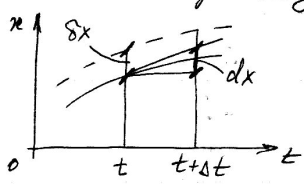
Истинное перемещение может принадлежать чслу виртуальных, но не всегда.
Постулат
идеальных связей: Для идеальных связей
сумма элемю работ реакций этих связей
при любом виртуальном перемещении либо
равна 0, если связи неосвобождающие,
либо =0 или >0 для освобождающих связей. ![]() или
или
Принцип возможных перемещений:
Для
рановесия сис-мы мат. точек со склерономными
идеальными связями необх. и дост., чтобы
сумма элем. работ всех действующих на
сис-му активн. сил при любом виртуальном
перемещении = 0 (для неосвобожд. связей)
или
 0
(освобожд. связей )
0
(освобожд. связей )
![]()
Д-во: Н)
Пусть сис-ма состоит из n
точек находящихся в равновесии:
![]() .
Дадим каждой из них виртуальное
перемещение
.
Дадим каждой из них виртуальное
перемещение :
:![]() Учитывая постулат идеальной связи
получим:
Учитывая постулат идеальной связи
получим:![]()
Д)
Пусть
 .
Докажем от противного. Допустим что
одно из точек перешла в движение – нет
равновесия
.
Докажем от противного. Допустим что
одно из точек перешла в движение – нет
равновесия

Под действ
![]() точка получает истинное перемещ-е
точка получает истинное перемещ-е![]() направл-ое по
направл-ое по (т.к.
движение из сост. покоя). Т.к. связи
стационарны то истинное перем-е совпадает
с возможным =>
(т.к.
движение из сост. покоя). Т.к. связи
стационарны то истинное перем-е совпадает
с возможным =>![]() =>
=> .
Т.к. связи идеальны и неосвобожд. то
.
Т.к. связи идеальны и неосвобожд. то =>
=> -противоречиеУравнение
Даламбера-Лагранжа Мех.
сис-ма – мн-во
точек, движение и положение которых
зависит от движения и положения всех
остальных.
-противоречиеУравнение
Даламбера-Лагранжа Мех.
сис-ма – мн-во
точек, движение и положение которых
зависит от движения и положения всех
остальных.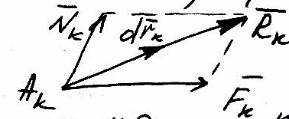
Связи – условия, которые налагают ограничения либо только на положение (геом. связь), либо также и на скорость движения точек сис-мы (кинематическая связь).
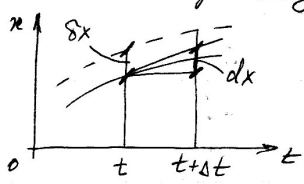
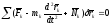
Перемещения, совершаемые движущейся точкой за определённый промежуток времени и зависящие от закона движения будем называть истинными перемещениями.
![]()
Любое
элементарное перемещение, которое может
быть сообщено из занимаемого в дан. мом.
времени положения при сохранении
наложения на неё связей будем называть
виртуальными(возможными)
перемещениями.
![]()
Геом. связи могут быть склерономными (стационарными) и реономными (нестационарными), а так же неосвобождающими (которые точка покинуть не может) и освобождающими(может покинуть).
Постулат
идеальных связей: Для идеальных связей
сумма элемю работ реакций этих связей
при любом виртуальном перемещении либо
равна 0, если связи неосвобождающие,
либо =0 или >0 для освобождающих связей.
![]() или
или![]()
Принцип Даламбера-Лагранжа:
Пусть
есть си-ма из n
материальных точек с неосвоб. идеальными
связями, тогда для любой точки сис-мы
согласно принципу Даламбера имеет место
ур-ние:

Сообщим
точкам системы виртуальное перемещение
 и
полученные равенства сложим
и
полученные равенства сложим
![]() - по постулату идеальных связей, тогда
- по постулату идеальных связей, тогда
 - ур-ние Даламбера-Лагранжа
(общее ур-ние динамики) (принцип
Даламбера-Лагранжа:
для механической системы с идеальными
неосвобождающими связями, движущейся
относительно инерциальной системы
координат, в любой момент времени
выполняется равенство нулю суммы
элементарных работ активных сил и сил
инерции на любом виртуальном перемещении)
- ур-ние Даламбера-Лагранжа
(общее ур-ние динамики) (принцип
Даламбера-Лагранжа:
для механической системы с идеальными
неосвобождающими связями, движущейся
относительно инерциальной системы
координат, в любой момент времени
выполняется равенство нулю суммы
элементарных работ активных сил и сил
инерции на любом виртуальном перемещении)
В проекциях:

