

16.Компоновочные схемы ракет; способы создания управляющих сил и моментов. Принцип разбиение ракеты по ступеням.
Способы создания управляющих сил и моментов.
Под управляемым полетом ЛА понимается возможность изменения скорости и направления его движения под действием управляющих сил и моментов, которые по физической природе могут быть аэродинамическими и реактивными (газодинамическими).
В соответствии с общей задачей управления полетом ЛА все устройства, создающие управляющие силы и моменты, можно разделить на две группы:
органы управления — устройства, с помощью которых регулируется значение управляющих сил;
органы стабилизации — устройства, с помощью которых создаются моменты, необходимые для угловой стабилизации ЛА относительно центра масс.
Аэродинамические_силы_могут создаваться несущими поверхностями, оперением и корпусом. Крылатые ЛА создают управляющие силы в основном за счет крыльев и имеют наибольшее распространение при полетах на малых и средних высотах (H<30... 35 км) при дозвуковых и умеренных сверхзвуковых скоростях (М<5). При больших высотах полета (Н>35 км) для создания потребных подъемных сил требуется значительная площадь крыльев, что приводит к увеличению стартовой массы и размеров ЛА. При гиперзвуковых скоростях полета управляющие силы, создаваемые корпусом, достаточны для управления, поэтому в этих случаях применяются бескрылые ЛА.
Реактивные (газодинамические) управляющие силы создаются с помощью основных или вспомогательных реактивных двигателей. Они обычно используются для управления ЛА на больших высотах, а также на участках старта ЛА, где аэродинамические органы управления неэффективны.
Управляющие моменты используются для управления и стабилизации углового положения ЛА при воздействии на него возмущающих сил. Способы создания управляющих моментов по своей природе аналогичны способам создания управляющих сил.
Поворотное оперение может размещаться в носовой или кордовой части корпуса. Рули, расположенные за несущей поверхностью, могут отклоняться в одну и в разные стороны. В последнем случае они выполняют роль элеронов.
Интерцепторы (пластины) устанавливаются вблизи задней кромки крыльев и стабилизаторов и перемещаются под воздействием команд в верхнее или нижнее положение. Так, например, при перемещении интерцептора в верхнее положение на верхней поверхности крыла (стабилизатора) возникает повышенное давление, в результате чего появляется подъемная сила, действующая вниз. Интерцепторы относятся к органам управления релейного типа и применяются на дозвуковых маломаневренных ЛА.
Роллероны представляют собой отклоняющиеся поверхности с вращающимся ротором, размещаются в концевой части крыльев или стабилизаторов и предназначены для уменьшения угловой скорости ЛА относительно продольной оси, т. е. стабилизации ЛА по крену. Раскрутка роторов до 500... 1000 об/с осуществляется набегающим потоком воздуха или газами из пороховых газогенераторов. Если угловая скорость ЛА по крену равна нулю, то роллероны устанавливаются по потоку и не создают стабилизирующего момента. Вращающиеся роторы роллеронов, обладая кинетическим моментом, стремятся сохранить постоянное положение в пространстве, в результате чего при появлении крена ЛА роллероны отклоняются относительно оси подвески и создают моменты, демпфирующие вращение ЛА.
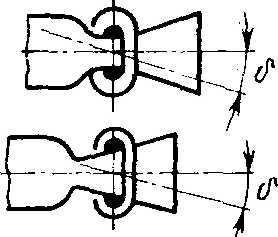
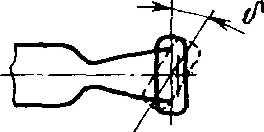
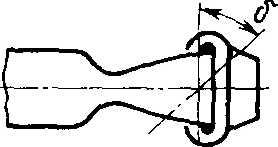
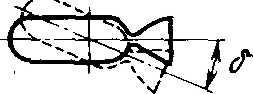
Газодинамические способы создания управляющих моментов приведены в табл.
|
Орган управления |
Схема органов управления |
Орган упрабления |
Схема органов управления |
|
Газовые рули |
|
Поворотные сопла
|
|
|
Дефлекторы |
| ||
|
Сопловые насадки |
|
Вдувание или опрыскивание жидкости в сопло
|
|
|
Качающие двигатели |
|
Струйные рули |
|

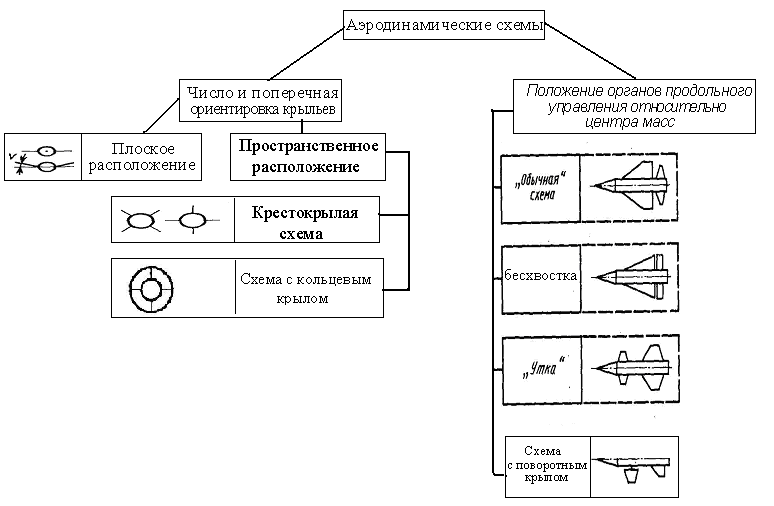
Аэродинамические схемы крылатых ЛА и конструкция аэродинамических ОУ
Аэродинамические схемы характеризуются взаимным пространственным расположением неподвижных несущих поверхностей и подвижных органов управления на корпусе ЛА, при этом различные ЛА сравниваются по числу и поперечному расположению крыльев и положению органов управления относительно центра масс ЛА. Рассмотрим особенности каждой схемы.
Плоское расположение крыльев, характерное для ЛА самолетной схемы, может быть выполнено с углом поперечной V-образности и без него. Управляющие силы, в основном, создаются крыльями, а управляющие моменты вертикальным и горизонтальным оперением. Особенностью этой схемы является то, что управляющие силы в вертикальной плоскости создаются за счет угла атаки, а в горизонтальной — или посредством угла скольжения при плоском развороте, или за счет угла крена при координированном развороте. При плоском раз вороте упрощается система управления, но в создании боковой силы участвуют только корпус и вертикальное оперение, по своей площади, значительно уступающие крылу. При координированном развороте боковая сила может быть достаточно большой, так как она создается крылом, но зато усложняется работа системы управления.
Горизонтальное оперение может устанавливаться как в носовой, так и в кормовой части корпуса, а вертикальное только в кормовой, так как ЛА в противном случае не будет обладать статической устойчивостью пути.
Принцип разбиения ракеты по ступеням
Ступенью ЛА
называется отделяемая часть составной
конструкции, имеющая собственный
двигатель и топливную систему и
обеспечивающая благодаря работе
двигательной установки движение ЛА на
определённом участке траектории. ЛА
могут быть одноступенчатыми и
многоступенчатыми. Для оценки
целесообразности применения
многоступенчатых ЛА по значению
идеальной конечной скорости разгона
![]() может быть использованы формула К. Э.
Циолковского.
может быть использованы формула К. Э.
Циолковского.
![]() ,
где
,
где![]() - относительная масса топлива,
- относительная масса топлива,![]() ,
,![]() - масса топлива и начальная масса ступени
соответственно. Из формулы следует: чем
выше скорость истечения газа, относительная
масса топлива и больше число ступеней,
тем большую конечную скорость разгона
- масса топлива и начальная масса ступени
соответственно. Из формулы следует: чем
выше скорость истечения газа, относительная
масса топлива и больше число ступеней,
тем большую конечную скорость разгона![]() и дальность полёта может развить
многоступенчатый ЛА. От сюда, из расчёта,
зная нужную скорость и дальность полёта
ЛА до цели можно выбирать количество
ступеней ЛА. В основном при выборе
оптимального количества ступеней ракеты
руководствуются дальностью полёта
ракеты до цели и стартовым весом ракеты.
и дальность полёта может развить
многоступенчатый ЛА. От сюда, из расчёта,
зная нужную скорость и дальность полёта
ЛА до цели можно выбирать количество
ступеней ЛА. В основном при выборе
оптимального количества ступеней ракеты
руководствуются дальностью полёта
ракеты до цели и стартовым весом ракеты.
600 – 800 км – одноступенчатая ракета
4 000
– 6000 км – двухступенчатая ракета
000
– 6000 км – двухступенчатая ракета
10000– 12000 км – трёхступенчатая ракета
Оптимальную величину коэф. энерговоор. можно получить дифференцируя конечную скорость по энерговооружённости первой ступени.
Компоновочные схемы ракет
Многоступенчатые ЛА могут составляться из ступеней по различным схемам:
Тандемная схема – ступени соединены последовательно, что позволяет уменьшить лобовое сопротивление ЛА, упростить его сборку, монтаж, пусковую установку.
Пакетная схема – ступени соединены параллельно между собой, что уменьшает общую длину ЛА, даёт возможность на старте работать всем двигателям ступеней одновременно и тем самым создавать большую тягу по сравнению с тандемной схемой.