

13. Система управления ла. Типы траекторий. Определение дальности полета. Траектория наведения. Системы управления ла.
При движении ЛА к цели выделяют 2 типа траектории: 1.теоретическая(кинематическая) траектория движения центра масс, соответствующее идеальным или невозмущенным уравнениям движения при идеальной работе СУ. 2.действительная(возмущенная) траектория соответствующая реальным условиям движения ЛА, на которое действует случайные погрешности системы управления и процессы.
Т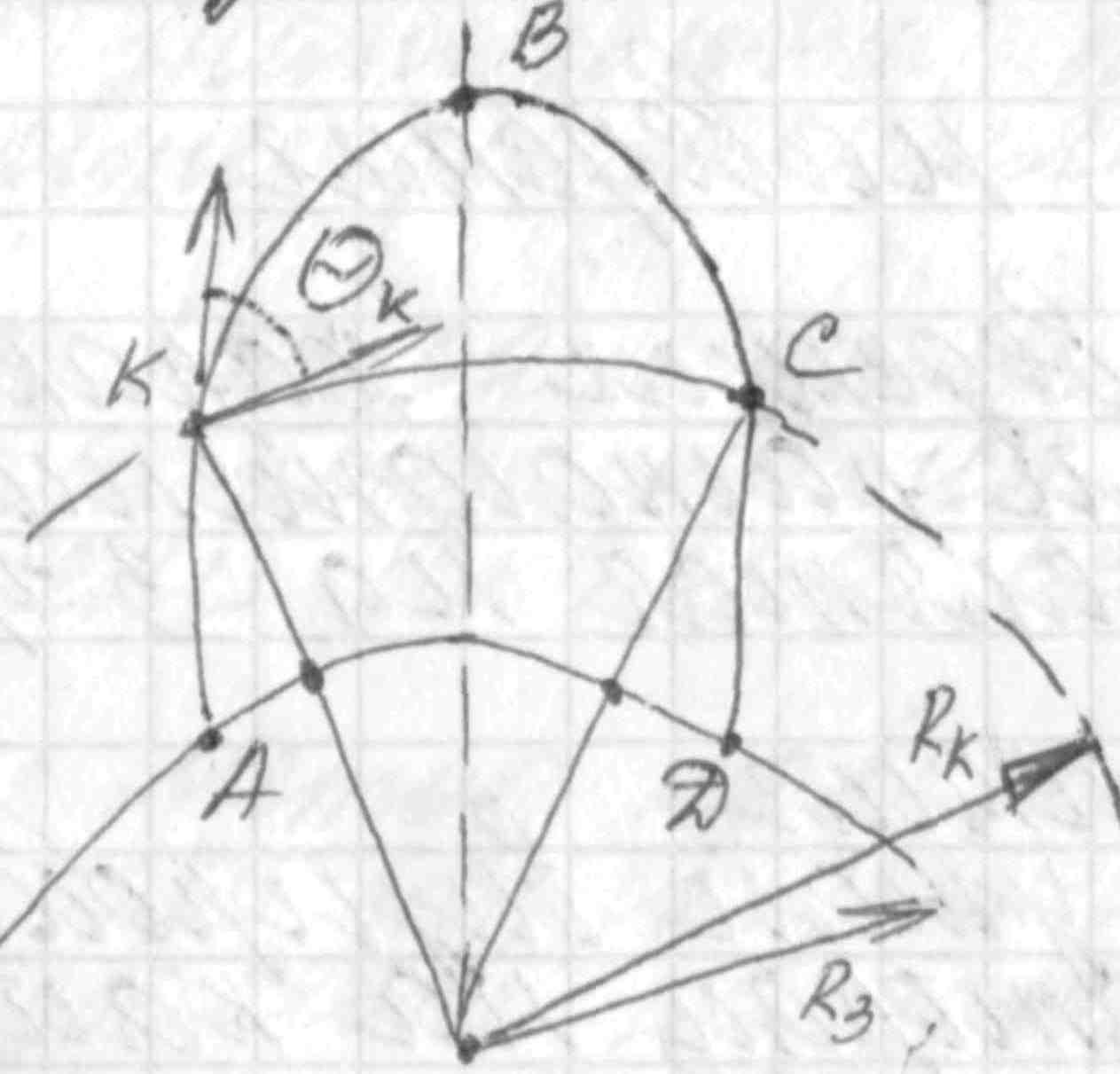 раектории
делят на 2 типа: -программные(траектории
получаемые при отработке СУ, заданных
законов движения. Например, траектория-
любое движение баллистических ракет,
которое состоит из трех участков. АК -
активный участок при работающей ДУ, на
котором осуществляется набор заданной
скоростиu< θ=90÷θK.
θKобеспечивает
заданную дальность. КВС – пассивный
участок осуществляемый по эллиптической
траектории в верхних слоях атмосферы
по закону Кетлера.CД –
участок наведения служит для наведения
или корректировки. Определение дальности
полета:
раектории
делят на 2 типа: -программные(траектории
получаемые при отработке СУ, заданных
законов движения. Например, траектория-
любое движение баллистических ракет,
которое состоит из трех участков. АК -
активный участок при работающей ДУ, на
котором осуществляется набор заданной
скоростиu< θ=90÷θK.
θKобеспечивает
заданную дальность. КВС – пассивный
участок осуществляемый по эллиптической
траектории в верхних слоях атмосферы
по закону Кетлера.CД –
участок наведения служит для наведения
или корректировки. Определение дальности
полета:
L=LK+LЭ+LД=КЭLЭ; КЭ=1,03÷1,10;LЭ=2βЭRЗ;L=2 КЭβЭRЗ;
βЭ=![]() ;
;![]() ;
;![]() );
);
-наведения(определяют методами, учитывающими взаимное положение ЛА и цели, так и скорости движения. Делятся на 2 группы: 1.теленаведения, 2.самонаведения).
I .
Методы теленаведения характеризуются
взаимным расположением и движением ЛА.
Делятся на 3 группы: 1.Метод
совмещения(характеризуется углом
визирования, реализуется оператором
на командном пункте посредством
совмещения изображения ЛА и цели на
экране. «-»: большая кривизна траектории,
что приводит к значительным перегрузкам
при стрельбе в передней полусфере);
2.Метод теленаведения с упреждением
(для снижения перегрузок, когда ЛА
наводится в упрежденную точку встречи.
«+»: уменьшение кривизны траектории при
стрельбе в переднюю полусферу); 3.Метод
углового сближения(разновидность
метода теленаведения с упреждением. Но
угол меняется от Δφ до 0. «+»: минимальная
кривизна траектории => минимальные
перегрузки. «-»: сложная система
управления).
.
Методы теленаведения характеризуются
взаимным расположением и движением ЛА.
Делятся на 3 группы: 1.Метод
совмещения(характеризуется углом
визирования, реализуется оператором
на командном пункте посредством
совмещения изображения ЛА и цели на
экране. «-»: большая кривизна траектории,
что приводит к значительным перегрузкам
при стрельбе в передней полусфере);
2.Метод теленаведения с упреждением
(для снижения перегрузок, когда ЛА
наводится в упрежденную точку встречи.
«+»: уменьшение кривизны траектории при
стрельбе в переднюю полусферу); 3.Метод
углового сближения(разновидность
метода теленаведения с упреждением. Но
угол меняется от Δφ до 0. «+»: минимальная
кривизна траектории => минимальные
перегрузки. «-»: сложная система
управления).
II.Методы самонаведения определяются взаимным положением ЛА и цели => отсутствует командный пункт. Делятся на 5 групп: 1.Метод наведения с постоянным углом пеллинга (пеллинг-угол полета задается таким образом, чтобы вектор скорости был направлен в точку встречи впереди цели. «-»: значительные перегрузки, малые скорости движения, большие радиусы); 2.Метод погони(характеризуется постоянным направлением вектора скорости на цель); 3.Метод наведения с постоянным углом упреждения(позволяет получить траектории близкие к прямолинейным); 4.Метод пропорционального сближения (характеризуется тем, что угловая скорость вектора скорости пропорциональна угловой скорости линии визирования. Самый распространенный метод, т.к. перегрузки самые минимальные); 5.Метод параллельного сближения(наведение происходит в мгновенную точку встречи, т.е линии визирования перемещается в пространстве поступательно)
Система управления состоит из аппаратуры наведения(АН) и аппаратуры стабилизации(АС). АН определяет скорость ЛА и цели, которая поступает может быть на борту или КБ. АС для устранения рассогласования между текущим значением параметра и его требуемым значением определяемое АН и находится только на борту. СУ делят на 4 типа: 1.Автономные(-гироскопические; -инерциальные; -астронавигационные; -магнитометрические); 2.Телеуправления(-командные; -по лучу; -радионавигационные); 3.Самонаведения(-активные ; -полуактивные; -пассивные); 4.Комбинированное(-автономные+самонаводящиеся; -автономные+телеуправления; -телеуправления+самонаведения; -автономные+телеуправления+самонаведения).
1.Автономные(наведение на цель производится по программе заложенной до старта в вычислительную машину. Управляющие сигналы формируются устройствами расположенными только на борту ЛА для управления движением траектории);2.Телеуправления(аппаратура находится на ЛА и КП и обеспечивает полет ЛА по методам рассмотренным выше);3.Самонаведения(полет по вышеописанным методам, но управляющие сигналы вырабатываются за счет излучения или отражения энергии от поверхности цели);4.Комбинированное.
СУ характеризуются степенью автоматизации. 3 типа: -неавтоматические(все решения по управлению полетом осуществляет оператор); -полуавтоматические(оператор осуществляет часть команд по управлению ракетой); -автоматическая(после старта оператор лишь следит за ЛА).