

37. Назначение хвостового оперения. Балансировочная зависимость. Общий подход к выбору оперения в начальном приближении.
В ыбор
оперения ЛА
ыбор
оперения ЛА
Рассмотрим балансировочную зависимость для ЛА.
Рассмотрим моменты действующие на ЛА в состоянии балансировки. Под состоянием балансировки понимается ЛА, на который действует нулевой момент(а нашем случае момент тангажа).

-если для
![]() -большой,
значит при малых α ЛА тяжело управляется
на траектории и требует значительные
запасы энергии для решения вопросов
управл. ЛА на траектории;
-большой,
значит при малых α ЛА тяжело управляется
на траектории и требует значительные
запасы энергии для решения вопросов
управл. ЛА на траектории;
-при малых
отношениях
![]() ЛА становится очень чувствительным к
управлению, а значит и к воздействию
возмущающих моментов, при этом возникают
трудности по реализации малых углов
атаки. С другой стороны СУ постоянно
вынуждена компенсировать действие
моментов. При этом ЛА совершает большие
колебания относительно заданного
углового положения в пространстве, что
ухудшает его летные характеристики,
приводит к большим нормальным перегрузкам
действующим на ЛА, и также увеличивает
затраты на управление.
ЛА становится очень чувствительным к
управлению, а значит и к воздействию
возмущающих моментов, при этом возникают
трудности по реализации малых углов
атаки. С другой стороны СУ постоянно
вынуждена компенсировать действие
моментов. При этом ЛА совершает большие
колебания относительно заданного
углового положения в пространстве, что
ухудшает его летные характеристики,
приводит к большим нормальным перегрузкам
действующим на ЛА, и также увеличивает
затраты на управление.
Н еобходимо
найти компромисс между устойчивостью
и управляемостью. В абсолютном смысле
задача выбора оперения может быть
решена, как оптимизационная задача при
рассмотрении всей траектории движения.L=max,ΔVПОТЕРЬ=min.
Чтобы определить необходимо задавать
шесть связей на основании которых могут
быть определены параметры оперения
еобходимо
найти компромисс между устойчивостью
и управляемостью. В абсолютном смысле
задача выбора оперения может быть
решена, как оптимизационная задача при
рассмотрении всей траектории движения.L=max,ΔVПОТЕРЬ=min.
Чтобы определить необходимо задавать
шесть связей на основании которых могут
быть определены параметры оперения![]() .
Часть параметров оперения задают по
рекомендациям. Площадь консоли вычисляется
исходя из заданной степени статической
устойчивости. Сужение крыла выбирают
исходя из
.
Часть параметров оперения задают по
рекомендациям. Площадь консоли вычисляется
исходя из заданной степени статической
устойчивости. Сужение крыла выбирают
исходя из![]() .
Заданную степень статической устойчивости
-
.
Заданную степень статической устойчивости
-![]() .
.![]() ,
,![]() .
Если
.
Если![]() >0,
то реализуются некоторые статические
неустойчивости. Если
>0,
то реализуются некоторые статические
неустойчивости. Если![]() <0,
то некоторые статические устойчивости.
<0,
то некоторые статические устойчивости.
В силу того,
что в процессе полета меняется положение
центра давления величина получается
переменной на траектории, в силу этого
выбирают для нескольких характерных
точек на траектории. Такими точками
могут быть: 1.начало полета(![]() );
2.
);
2.![]() ;
3.
;
3.![]() .
наиболее критическая точка определяет
выбор оперения.
.
наиболее критическая точка определяет
выбор оперения.
Процесс выбора
оперения включает в себя этапы: 1.выбрать
![]() ;
2.опеределение
;
2.опеределение![]() ;
3.выбрать
;
3.выбрать![]() ;
4.
;
4.![]()
39.ОПИШИТЕ С ПРИВЕДЕНИЕМ ОБОСНОВАНИЙ, КАКИЕ ПРЕДПОЛОЖЕНИЯ МОГУТ БЫТЬ СФОРМУЛИРОВАНЫ ОБ УСТРОЙСТВЕ И СВОЙСТВАХ НЕИЗВЕСТНОГО ОБЪЕТКА ПРИ НАЛИЧИИ ЛИШЬ ЕГО МАТЕМАТИЧЕСКОГО ОПИСАНИЯ В ВИДЕ ЛИНЕЙНОГО ОБЫКНОВЕННОГО ДИФФЕРЕНЦИАЛЬНОГО УРАВНЕНИЯ ВЫСОКГО(ВЫШЕ ВТОРОГО) ПОРЯДКА
Линейное обыкновенное ДУ высокого порядка можно представить в виде
![]()
 (1)
(1)
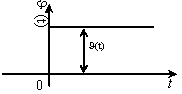
Этому урав-ию соответствует функциональная схема:
U(t) – внешнее воздействие (входной сигнал)
y(t) – выходной сигнал (вых. переменная, определяющая поведение объекта в окр. среде)
1. Если в ДУ (1) коэфф-ты (ai,i= 0,1,…,nиb) постоянны во времени, то объект явл-сястационарным, т.е. его конструктивные параметры и хар-ки, по которым вычисляются конкретные значения коэфф-в ур-я (1), во времени не изменяются.
2 .
Т.к. ДУ (1) получается свёрткой системы
из ДУ, описывающая динамику внутренних
процессов различной физической природы
в объекте, которые взаимодействшуют
между собой как показано на схеме
.
Т.к. ДУ (1) получается свёрткой системы
из ДУ, описывающая динамику внутренних
процессов различной физической природы
в объекте, которые взаимодействшуют
между собой как показано на схеме
то значит, что объект явл-ся системой, т.е. состоит из внутренних взаимодействующих функциональных элементов.
Примечание:
В ТАУ ДУ (1), описывающее изменение
вых. сигналаy(t)в зависимости от изменения вход. сигналаU(t),
принято называть динамическим звеномn-го порядка. Приn![]() 2
ДУ называют типовыми (элементарными)
динамическими звеньями. Т.е. можно
сказать, что объект представляет собой
систему из взаимодействующих динамических
звеньев, в т.ч. типовых.
2
ДУ называют типовыми (элементарными)
динамическими звеньями. Т.е. можно
сказать, что объект представляет собой
систему из взаимодействующих динамических
звеньев, в т.ч. типовых.
Иллюстрирующий пример:Угловое дв-ие ЛА по тангажу. Функциональная схема:
И У
– исполнительное устройство (рулевой
привод с органом управления полётом);
У
– исполнительное устройство (рулевой
привод с органом управления полётом);
r(t)
– командный (задающий) сигнал от сист.
упр-я полётом;
![]() (t)
– угол поворота органа упр-я;
(t)
– угол поворота органа упр-я;
![]() (t)
– угол тангажа .
(t)
– угол тангажа .
Линеаризованные уравнения в отклонениях от номинальных значений (p=d/dt):
для ЛА:![]() ;
для ИУ:
;
для ИУ:![]() .
.
После свёрки
получается:
![]()
или с абстрактными
обозначениями коэфф-в:
![]()
или обозначениями
![]() ;
;![]() :
:![]()
По ДУ (1) можно исследовать динамические и статические свойства объекта.
3 .
О динамических свойствах судят по
переходной хар-ке, т.е. по изменению вых.
сигналаy(t)
при подаче на вход типового вход. Сигнала
в виде ступенькиU(t)
=
.
О динамических свойствах судят по
переходной хар-ке, т.е. по изменению вых.
сигналаy(t)
при подаче на вход типового вход. Сигнала
в виде ступенькиU(t)
=![]() 1(t),
где
1(t),
где![]() =const,
=const,![]() .
.
![]()
![]() -
перерегулирование;
-
перерегулирование;![]() -
время переходного процесса.
-
время переходного процесса.
График изменения y(t) при заданном входеU(t) можно найти (построить): численным интегрированием ДУ (1); аналитическим решением ДУ (1).
Решение ур-я
(1) ввиду его линейности имеет вид:
![]() ,
где
,
где![]() -
общее решение однородного ДУ, полученого
из (1) приU(t)
-
общее решение однородного ДУ, полученого
из (1) приU(t)![]() 0.
Функция
0.
Функция![]() описывает собственное (или свободное)
движение объекта из отклоненного
состояния.
описывает собственное (или свободное)
движение объекта из отклоненного
состояния.
![]() -
частное решение ДУ (1), неоднородного,
т.е. при конкретном виде функцииU(t)
-
частное решение ДУ (1), неоднородного,
т.е. при конкретном виде функцииU(t)![]() 0.
Функция
0.
Функция![]() описывает установившиеся вынужденное
движ-ие под воздействиемU(t).
описывает установившиеся вынужденное
движ-ие под воздействиемU(t).
Функция
![]() определяется выражением:
определяется выражением:![]()
![]() (2),
где
(2),
где![]() i,i= 1,2,…,n
-корни характеристического ур-я
i,i= 1,2,…,n
-корни характеристического ур-я![]() (3);
(3);![]() i,i= 1,2,…,n
– произвольные константы, определяемые
по заданным ненулевым значениям начальных
условий
i,i= 1,2,…,n
– произвольные константы, определяемые
по заданным ненулевым значениям начальных
условий![]() .
.
Выражение (2)
для
![]() изменяет вид в зависимости от типа
корней
изменяет вид в зависимости от типа
корней![]() i,
которые могут быть действительными
(вещественными) или попарно
комплектно-сопряженными.
i,
которые могут быть действительными
(вещественными) или попарно
комплектно-сопряженными.
Например:
Пустьn=3 и характ-ое ур-е![]() имеет корни
имеет корни![]() ;
;![]() ;
;![]() .
Тогда выражение (2) принимает вид
.
Тогда выражение (2) принимает вид![]() (4). Если в (4)
(4). Если в (4)![]() <0
и
<0
и![]() <0,
т.е. все корни располагаются справа от
мнимой оси на комплексной плоскости
корней хар-го ур-я (3), то все все слагаемые
в (2), а значит и
<0,
т.е. все корни располагаются справа от
мнимой оси на комплексной плоскости
корней хар-го ур-я (3), то все все слагаемые
в (2), а значит и![]() при
при![]() будут стремится к нулю . Т.е. система из
отклоненного состояния будут возвращаться
в первоначальное состояние, т.е. онаустойчива.
будут стремится к нулю . Т.е. система из
отклоненного состояния будут возвращаться
в первоначальное состояние, т.е. онаустойчива.
В рассмотренном примере (n=3) корни могут располагаться как показано на рисунках:
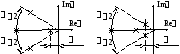
![]() -
степень устойчивости.
-
степень устойчивости.
![]() - колебательностью.
- колебательностью.
Чем больше
![]() ,
т.е. чем дальше корни от мнимой оси, тем
быстрее завершается переходный процесс
(
,
т.е. чем дальше корни от мнимой оси, тем
быстрее завершается переходный процесс
(![]() уменьшается). Чем больше
уменьшается). Чем больше![]() ,
тем сильнее колебания в переходном
процессе (возрастает перерегулирование
,
тем сильнее колебания в переходном
процессе (возрастает перерегулирование![]() ).
).
 4.
Статические свойства опред-ся статической
харак-ой (- это график зависимости
установившихся значений
4.
Статические свойства опред-ся статической
харак-ой (- это график зависимости
установившихся значений![]() от величины постоян. значений
от величины постоян. значений![]() ).
Ур-е статической харак-и получается из
ДУ, если в ур-ии (1) все производные
приравнять к нулю. Ур-е (1) тогда принимает
вид алгебраического ур-я
).
Ур-е статической харак-и получается из
ДУ, если в ур-ии (1) все производные
приравнять к нулю. Ур-е (1) тогда принимает
вид алгебраического ур-я![]() и график ст-ой хар-и:
и график ст-ой хар-и:![]()
41.ОПИШИТЕ С ПРИВЕДЕНИЕМ ОБОСНОВАНИЯ СПОСОБЫ И ПОСЛЕДОВАТЕЛЬНОСТЬ ПРОВЕДЕНИЯ ИССЛЕДОВАНИЙ ПРИ ТЕОРЕТИЧЕСКОМ ОПРЕДЕЛЕНИИ СТАТИЧЕСКИХ И ДИНАМИЧЕСКИХ СВОЙСТВ ЛИНЕЙНОЙ СТАЦИОНАРНОЙ СИСТЕМЫ С СОСРЕДОТОЧЕННЫМИ ПАРАМЕТРАМИ ПО ЕЕ МАТЕМАТИЧЕСКОЙ МОДЕЛИ.
1. Исследование свойств линейной стационарной САУ по корням характеристического уравнения.
Линейное Д.У. высокого порядка можно представить в виде:
![]() (1)
(1)
Решение
уравнения 1 в виду его линейности имеет
вид: y(t)=
yс(t)+
yв(t),
где yс(t)
– общее решение однородного ДУ полученного
из (1) при
![]() =0
функцияyс(t)
описывает собственное(свободное)
движение объекта; yв(t)
– частное решение ДУ(1) неоднородного
т. е. при конкретном виде функции
=0
функцияyс(t)
описывает собственное(свободное)
движение объекта; yв(t)
– частное решение ДУ(1) неоднородного
т. е. при конкретном виде функции
![]() .
Функцияyв(t)
описывает установившееся вынужденное
движение под воздействием
.
Функцияyв(t)
описывает установившееся вынужденное
движение под воздействием
![]() .
.
Функция
yс(t)
определяется выражением:
![]() ,
г
,
г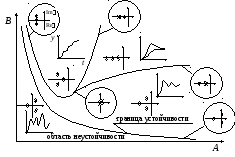 де
λ корни характеристического уравнения:
де
λ корни характеристического уравнения:
![]()
Корни характеристического уравнения (они же полюса ПФ Ф(s)) будут определять вид переходной характеристики замкнутой САУ. Для системы 3-го порядка (n = 3) это наглядно иллюстрирует диаграмма И.В.Вышнеградского, выполненная им в 1876 г. (см. рисунок). Эта диаграмма получается из анализа уравнения
![]() ,
(2)
,
(2)
полученного
из (2) при n
= 3 введением новой переменной
![]() .
При этом, коэффициенты в (2), называемые
параметрами Вышнеградского, определяются
формулами
.
При этом, коэффициенты в (2), называемые
параметрами Вышнеградского, определяются
формулами
![]() ,
,![]() .
.
Диаграмма показывает, как зависит вид переходного процесса (переходной характеристики) от расположения корней характеристического уравнения (т.е. полюсов ПФ) на комплексной плоскости. Аналогичные диаграммы могут быть построены и для систем более высокого порядка.
В теории САУ наибольшее распространение получили следующие корневые оценки качества:
- степень устойчивости ; - колебательность .
Эти
оценки имеют смысл только для устойчивых
систем. Поэтому представляя все корни
характеристического уравнения в общем
виде
![]() ,
,
полагая
для вещественных корней i
= 0, определение для рассматриваемых
корневых оценок формулируется следующим
образом
![]() ,
,![]() .
.
Н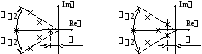 агляднее
это иллюстрируется графически на
комплексной плоскости корней. Например,
дляn
= 5 показано на рисунке.
агляднее
это иллюстрируется графически на
комплексной плоскости корней. Например,
дляn
= 5 показано на рисунке.
Исследование свойств линейной стационарной САУ по ПФ (по коэффициентам ПФ).
Определение корней степенных алгебраических уравнений высокого порядка является трудноразрешимой задачей без использования вычислительной техники. Поэтому в ТАУ используются специальные критерии устойчивости, позволяющие, в частности, избежать нахождение корней характеристического уравнения. Так называемые алгебраические критерии устойчивости основаны на известной связи коэффициентов характеристического уравнения
![]() ,a0
> 0 (3) с его корнями
i
, i
= 1,…,n.
,a0
> 0 (3) с его корнями
i
, i
= 1,…,n.
1. Необходимое условие устойчивости линейной САУ, которое формулируется следующим образом:
для
устойчивости линейной системы необходимо,
но не достаточно, чтобы все коэффициенты
характеристического уравнения (3) были
строго положительны, то есть
![]() .
.
2. Необходимый и достаточный критерий устойчивости Гурвица, который формулируется следующим образом: линейная САУ будет устойчивой, то есть корни ее характеристического уравнения (3) будут иметь отрицательные вещественные части, если строго положительны определитель Гурвица (n 0) и все его диагональные миноры (i 0, i = 1,…, n-1).
Определитель Гурвица n-го порядка составляется по следующему правилу:
1) по главной диагонали от левого верхнего угла до правого нижнего располагаются коэффициенты уравнения (3), начиная с a1 до an
 ;
(4)
;
(4)
2) заполняются столбцы определителя. Каждый столбец дополняется вверх от диагонали последовательно коэффициентами с возрастающим индексом, а вниз – коэффициентами с убывающим индексом. В случае отсутствия такого коэффициента (то есть индекс меньше нуля или больше n) на его месте пишется нуль.
Диагональные миноры получаются отчёркиванием сверху слева по одной строке и одному столбцу, по две строки и двум столбцам и т.д.
42.ПОКАЖИТЕ,КАКИМ ОБРАЗОМ У СТАТИЧЕСКОЙ СИСТЕМЫ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СТАТИЧЕСКАЯ ОШИБКА МОЖЕТ МОЖЕТ БЫТЬ СДЕЛАНА СКОЛЬ УГОДНО МАЛОЙ И КАКИЕ УГОДНОГО МАЛОЙ И КАКОЕ У ДАННОГО СПОСОБА ПРИ ПРАКТИЧЕСКОМ ПРИМЕНЕНИИ.
1. Определение понятие статической ошибки по функциональной схеме замкнутой системы.
регулятор
обьект





![]()
![]()
![]()


Где y*(t)-
задающий сигнал,![]() (t)-y*(t)-y(t)-
ошибка,y(t)-выходной
сигнал
(t)-y*(t)-y(t)-
ошибка,y(t)-выходной
сигнал![]() =
=![]()
![]()
![]()

![]() y*=y
y*=y![]()



![]()
 T
T
2.Определение
величины
![]() для системы автоматического регулирования
углом тангажа структурная схема
для системы автоматического регулирования
углом тангажа структурная схема










Wk(S) Wпр(S) Wп(S)![]() U(S)
U(S)
![]()
![]()

Изобразим по
Лапласу сигналов
![]() -задающий
сигнал;
-задающий
сигнал;![]() -
сигнал ошибки;
-
сигнал ошибки;![]() -
командный сигнал на привод органа
управления,
-
командный сигнал на привод органа
управления,![]() -
сигнал отклонения ОУ;
-
сигнал отклонения ОУ;![]() -
выходной сигнал угла тангажа. ПФ
-
выходной сигнал угла тангажа. ПФ![]() -ПФ
корректирующего устройства,
-ПФ
корректирующего устройства,![]() -
ПФ привода с ОУ. (U(S)=
-
ПФ привода с ОУ. (U(S)=![]() )
пологая что
)
пологая что![]() ,получаем
,получаем![]() Ku)
Ku)
![]() -
ПФ ЛА в угловом движении по тангажу.
-
ПФ ЛА в угловом движении по тангажу.
Приведем данную структурную систему к типовому виду
![]() -
ПФ системы в развернутом состоянии, т.е
при
-
ПФ системы в развернутом состоянии, т.е
при![]()
Найдем ПФ
системы в замкнутом соединении, т.е.
когда есть главная обратная связь и
![]()
![]() -
ПФ для выходного сигнала
-
ПФ для выходного сигнала![]() по входу
по входу![]()
![]() - ПФ для ошибки
- ПФ для ошибки![]() по входу
по входу![]()
Найдем величину
![]() ,задавая
,задавая![]() -
типовой ступенчатый сигнал, по теории
операционного исчисления для конечного
значения запишем
-
типовой ступенчатый сигнал, по теории
операционного исчисления для конечного
значения запишем![]()
=![]()
Таким образом
увеличивая
![]() ,
можно уменьшить
,
можно уменьшить![]() ,т.к
значения дляK
,т.к
значения дляK![]() иK
иK![]() округляются конструктивными параметрами
соответственно привода ЛА, то изменять
в больших пределах можно коэф-тK,
у корректирующего устройства.
округляются конструктивными параметрами
соответственно привода ЛА, то изменять
в больших пределах можно коэф-тK,
у корректирующего устройства.
2.Определим
диапазон возможного изменения K![]() .
Рассмотрим характеристическое уравнение
замкнутой системы, которое получаем по
знаменателю Ф(S).
.
Рассмотрим характеристическое уравнение
замкнутой системы, которое получаем по
знаменателю Ф(S).![]() Т.к
для характ-ого уравнения 2-го порядка
необходимо условие устойчивости
Т.к
для характ-ого уравнения 2-го порядка
необходимо условие устойчивости![]() ,является
также достаточными, то из требования
,является
также достаточными, то из требования![]() таким образом теоретически диапазон
изменения
таким образом теоретически диапазон
изменения![]() :
:![]() ,
т.е. при
,
т.е. при![]()
3.Ограничение
на большие значения
![]() ,
рассмотрим по влиянию увеличения
,
рассмотрим по влиянию увеличения![]() ,на
вид ЛАХ разомкнутой системы. Найдем
ЧПФ,
,на
вид ЛАХ разомкнутой системы. Найдем
ЧПФ,![]()
![]()
![]()
Физический
смысл
![]() -
отношение амплитуды выходных колебании
к амплитуде входных на заданной частоте
-
отношение амплитуды выходных колебании
к амплитуде входных на заданной частоте![]() .
.![]() -сдвиг
фаз колебании на выходе по отношению к
входным колебаниям( при <0 , запаздывание).
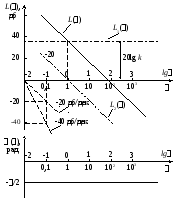
График ЛАХ, т.е в виде отрезков прямых
асимптот, имеет в нашем случае следующий
вид (удобно строить с использованием
формального правила по
-сдвиг
фаз колебании на выходе по отношению к
входным колебаниям( при <0 , запаздывание).
График ЛАХ, т.е в виде отрезков прямых
асимптот, имеет в нашем случае следующий
вид (удобно строить с использованием
формального правила по![]() )
)
L (
(![]() )
)
60
4

0
2

0
` ![]()

 1 10
1 10![]()
![]() lg(
lg(![]() )
)
-20
-40
![]() -
частота сопряжения асимптот,
-
частота сопряжения асимптот,![]() -частота,
при которой
-частота,
при которой![]() ,т.е
,т.е![]()
Сигналы с
частотой 0<![]() <
<
![]() ,
усиливаются по амплитуде, а с частотой
,
усиливаются по амплитуде, а с частотой![]() ослабляются на выходе. Таким образом
ослабляются на выходе. Таким образом![]() определяет полосу пропускания. Таким
образом, если увеличитьK
определяет полосу пропускания. Таким
образом, если увеличитьK![]() ,то
график ЛАХ подымится, что приведет к
увеличению частоты среза (
,то
график ЛАХ подымится, что приведет к
увеличению частоты среза (![]() )
т.е к увеличению полосы пропускания
частот. Это значит вместе с полезными
низкочастотными сигналами, будет без
ослабления проходить высокочастотные
помехи, ухудшая качество системы.
)
т.е к увеличению полосы пропускания
частот. Это значит вместе с полезными
низкочастотными сигналами, будет без
ослабления проходить высокочастотные
помехи, ухудшая качество системы.
43.СФОРМУЛИРУЙТЕ С ПРИВЕДЕНИЕМ ОБОСНОВАНИЙ,КАКИЕ ТРЕБОВАНИЯ ПРЕДЪЯВЛЯЕТ САУ УГЛОМ ТАНГАЖА К ДИНАМИЧЕСКИМ,ВКЮЧАЯ ЧАСТОТНЫЕ,ХАР-М СЛЕДЯЩЕЙ СИСТЕМЫ, КОТОРОЙ ЯВЛЯЕТСЯ РУЛЕВОЙ ПРИВОД С ОРГАНОМ УПРАВЛЕНИЯ ПОЛЕТОМ,И КАКИЕ ТРЕБОВАНИЯ МОГУТ БЫТЬ ОБЕСПЕЧЕНЫ ПРИ ПРОЕКТИРОВАНИИ СЛЕДЯЩЕЙ СИСТЕМЫ.
CАУ угловым движением по тангажу: вход-угол отклонения управления органом полета(с помощью исполнительного устр-ва-привода)
выхлд-угол тагажа
Рассмотрим функциональную схему(какие элементы и как они взаимодействуют)
К У-коррект.устр-во
У-коррект.устр-во
Нарисуем структурную схему( ПФ и изображение сигналов)

Линеаризованные уравнения:
углового
движения ЛА
![]()
исполнительного
устройства (ИУ)
![]()
Запишем зад.
урав. в операт. форме:
![]() ;
;![]() .
.
ПФ ЛА в угловом
движении по тангажу:![]()
![]() -коэффициент
затухания :
-коэффициент
затухания :![]() >=1-апериодическое
звено (без колебаний), 0 <
>=1-апериодическое
звено (без колебаний), 0 <![]() <
1, то ПФW(s),
описывающая угловое движение ЛА,
представляет собой неустойчивое
колебательное звено.
<
1, то ПФW(s),
описывающая угловое движение ЛА,
представляет собой неустойчивое
колебательное звено.
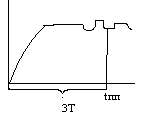
Т-постоянная времени [c] ----tпп<=3T
входной сигнал
![]()
выходной сигнал
S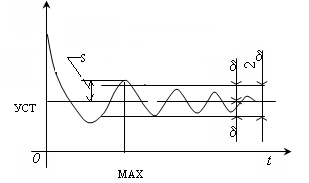 -перерегулирование
-перерегулирование![]()
Колебания => наличие комплексных корней характеристич. ур-я
tпп=2s,
стремимся уменьшить Т![]() степень уменьшения амплитуды
степень уменьшения амплитуды
Для устойчивости-корректирующее звено. знаменатель приравниваем к 0
Введем ПФ для
привода
![]() ,
, ,
,![]()
ПФ корректирующего
устройства
![]() (К1 –легко регулируется-электрические
цепи => меняем сопротивление)
(К1 –легко регулируется-электрические
цепи => меняем сопротивление)
Т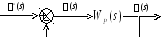 ребования
к параметрам Кu и
ребования
к параметрам Кu и
![]()
Приведем структурную схему к типовому виду
Передаточная
функция САУ в разомкнутом состоянии
(![]() )
)
![]()
Передаточная
функция САУ в замкнутом состоянии (![]() )
)
![]()
t<=T
Рассмотрим частотную ПФ
![]()
![]() ,-алгебраическая
форма записи гдеU(t)
=ReW(j)
–вещественная частотная характеристика(ВЧХ);V(t)
=ImW(j)
–мнимая частотная характеристика(МЧХ).
,-алгебраическая
форма записи гдеU(t)
=ReW(j)
–вещественная частотная характеристика(ВЧХ);V(t)
=ImW(j)
–мнимая частотная характеристика(МЧХ).
![]() -
показательная форма записи,
-
показательная форма записи,
![]() – модуль ЧПФ;
– модуль ЧПФ;
![]() – аргумент ЧПФ,
– аргумент ЧПФ,
![]() – отношение амплитуд вых и вх сигналов,-амплитудной частотной характеристикой
– отношение амплитуд вых и вх сигналов,-амплитудной частотной характеристикой
() – сдвиг фаз колебаний вых. и вх. сигналов,-фазовой частотной характеристикой(ФЧХ).
Для построения логарифмических частотных характеристик используется показательная форма ЧПФ Зависимость L() = 20lgAназываетсялогарифмической амплитудой частотной характер.Зависимость=() называетсялогарифмической фазовой частотной характеристикой(ЛФЧХ).
![]() .
.
 01- области низких частот;
01- области низких частот;
1-
область высоких частот, где![]() - частотасопряжениянизкочастотной
и высокочастотной областей.
- частотасопряжениянизкочастотной
и высокочастотной областей.
Диапазон частот
0 сопределяет, так называемую,полосу
пропусканиячастот, так как в этом
диапазоне сигнал передается системой
без ослабления по амплитуде. Когда вся
ЛАХ располагается ниже оси частот (приk1), то полосой пропускания считается
диапазон (01)
до наименьшей частоты сопряжения![]() ,
то есть область низких частот.
,
то есть область низких частот.