

103. Фазовий метод вимірювання кутових координат.
Фазові методи базуються на вимірюванні різниці фаз коливань, що приймаються двома антенами, що рознесені в просторі (радіо-пеленгатор) (рис.7.4).
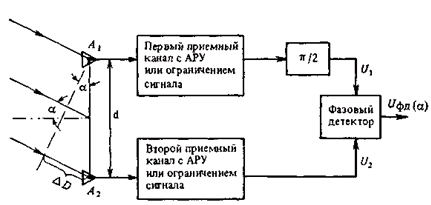
При фазовому методі вимірюється різниця фаз коливань, що збуджуються в антенах А1 та А2. Якщо довжина хвилі приймаємих коливань, рівна і то різниця фаз сигналів, що приймаються антенами визначається виразом:
![]() .
.
Різницевий і сумарний сигнал визначається співвідношеннями:
![]()
![]() .
(I.7.4)
.
(I.7.4)
З виразу (I.7.4) можна одержати вираз для характеристики пеленгації
![]() .
(I.7.5)
.
(I.7.5)
104. Принципи отримання інформації радіолокації
Процес отримання інформації радіолокації, у багатьох випадках єдиний, зручно розділити на наступні етапи:
Огляд простору
В сучасних радіолокаторах використовуються антени направленої дії, що сприяє збільшенню дальності виявлення і підвищенню точності вимірювання кутових координат. Вживання гостронаправлених антен приводить до необхідності огляду простору, оскільки наперед не відоме, звідки з'явиться мета. Для станцій точного вимірювання координат, що мають свій в розпорядженні доопытными дані целеуказания, огляд проводиться у вузькому секторі. Тому замість терміну «огляд простору» використовують більш точний в даному випадку термін «пошук цілі». Для багатофункціональних радіолокаторів перехід від виявлення до супроводу може проводитися без попереднього пошуку.
Розрізняють
одночасний;
послідовний;
змішаний огляд
При одночасному огляді число проміння РЛС, що перекриває зону огляду, рівне числу елементів дозволу по кутах, що вимагає великого об'єму апаратури.
Послідовний огляд проводиться за допомогою одного променя, що спрощує конструкцію радіолокатора.
При змішаному огляді РЛС має декілька проміння, причому звичайно огляд по одній кутовій координаті проводиться одночасно, а по іншій — послідовно.
Серйозною гідністю одночасного і змішаного огляду є можливість отримання протягом одного періоду посилки даних обстановки для різних кутових напрямів. Це підвищує темп видачі даних, який знижується із збільшенням дальності дії радіолокатора у зв'язку із зростанням періоду посилки імпульсів.
Послідовний огляд може вестися:
1. За жорсткою програмою, коли діаграма спрямованості антени РЛС переміщається незалежно від результатів локації.
2. За гнучкою програмою, коли огляд програмується залежно від цих результатів.
|
|
|
а) |
б) |
в) |
Рис.1.1
Антени РЛС з послідовним оглядом можуть мати діаграми двох основних видів:
голчаті;
віялоподібні.
Залежно від характеру переміщень цих діаграм в просторі розрізняють:
круговий огляд;
секторний огляд;
спіральний огляд;
кадровий огляд.
Круговий огляд здійснюється шляхом обертання антени РЛС щодо вертикальної осі (мал. 1.1, а), наприклад наземних радіолокаторах дальнього виявлення і літакових РЛС огляду земної поверхні.
Спіральний огляд здійснюється шляхом швидкого переміщення променя по спіралі навкруги осі, яка утворює центр зони огляду (рис.1.1,б). Спіральний огляд застосовується при голчатих діаграмах спрямованості в деяких типах літакових радіолокаторів і станцій гарматного наведення.
Кадровий огляд досягається шляхом швидкого гойдання променя антени радіолокатора по одній кутовій координаті (азимуту) і повільного гойдання по іншій (куту місця). В результаті слід променя описує зигзагоподібну лінію в межах деякого кадру (мал. 1.1,в). Такий вид огляду використовується в режимі пошуку цілей, в наземних і корабельних радіолокаторах гарматного наведення.
Якщо круговий і секторний огляд — одномірні, то спіральний і кадровий відносяться до двовимірних методів огляду, оскільки огляд ведеться по двох кутових координатах — азимуту і куту місця.
В одновимірному випадку користуються плоскими, а в двовимірному — тілесними кутами, наприклад 0 На Рис.1.1.в - тілесний кут ділянки, що проглядається. Якщо плоскі кути вимірюють відношенням дуги до радіусу (радіани), то тілесні — відношенням площі поверхні сфери в межах кута до квадрата радіусу (стерадіани).
Інформація, одержувана від оглядового радіолокатора, може спостерігатися візуально на станційних індикаторах кругового або секторного огляду або транслюватися на винесені індикатори по дротах або радіолініях зв'язку, а також вводитися в системи напівавтоматичного або автоматичного супроводу цілей по дальності і кутовим координатам.
Виявлення цілей полягає: в ухваленні рішення про наявність або відсутність цілі в кожній виділеній ділянці простору з мінімально допустимою вірогідністю помилкових рішень.
Вимірювання - це оцінка координат і параметрів руху цілі.
Положення цілі в сферичній системі координат визначається наступними параметрами (Рис.1.2):
Дальність – R.
Азимут – .
Кут місця –.
Дальність – відстань від РЛС до цілі. Кутом місця називають кут між напрямом на об'єкт і горизонтальною площиною (поверхнею Землі). Азимут відлічують від напряму північ—південь або іншого напряму, прийнятого за початкове.
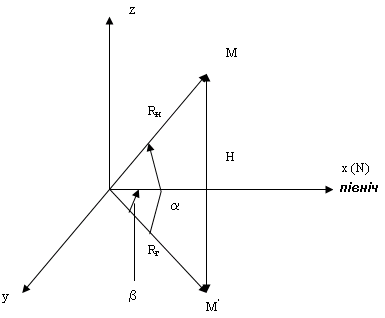
Рис.1.2
Тут М – місцеположення об'єкту в просторі.
В сферичній системі координат: Rн – похила дальність; - азимут цілі; - кут місця цілі.
В циліндровій системі координат: Rг – горизонтальна дальність; - азимут цілі; H – висота об'єкту над поверхнею землі.
Як параметри руху цілі можуть вводитися похідні координат, або інші параметри траєкторії цілі.
— Дозвіл полягає у виконанні задач виявлення і вимірювання параметрів довільної цілі за наявності інших цілей.
— Розпізнавання цілей полягає у встановленні приналежності цілі, що дозволяється, до певного класу. В одних випадках необхідно - встановити приналежність «свій — чужий» запитально-у відповідь за допомогою пристроїв пізнання радіолокації, а інших — розпізнати боєголовку балістичної ракети на фоні її корпусу, помилкових цілей, метеорних слідів і т.п. або визначити характер штучного супутника Землі за допомогою спеціальної апаратури селекції.
— Перешкодозахисна — це здатність радіолокатора підтримувати на заданому рівні показники якості виявлення, вимірювання (або розпізнавання) за наявності перешкод, а також здатність використовувати самі перешкоди як джерело інформації.
Швидкоплинність і складність обстановки радіолокації вимагають, як правило, високого темпу видачі даних, утворюючих потоки з великим об'ємом інформації. Тому кожна із задач: виявлення, вимірювання, дозвіл і розпізнавання, для будь - якого кінцевого об'єму простору повинна розв'язуватися за обмежений час.