

Порядок розрахунку перехідного процесу класичним методом
Базується на загальних математичних методах розв’язку інтергродиференціальних рівнянь. Метиою розрахунку перехідного процесу є три величини :
іуст – усталене значення струму, Uуст – напруги
р – корені характеристичного рівняння
розрахувати початкові умови i(0):U(0) – ?

K – порядок дифиренціального рівняння дорівнює кількості реактивних елементів схеми.
Записуємо загальний розв’язок і знаходимо сталі інтегрування:
Знаходження коренів характеристичного рівняння
 Алгебраізація
системи інтегродифиренціальних рівнянь
Кірхгофа
Алгебраізація
системи інтегродифиренціальних рівнянь
Кірхгофа
Щоб знайти корені характеристичного рівняння малюємо схему вільного режиму (рис 15.4):
не містить джерел енергії
п
 ісля
комутації
ісля
комутації
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Щоб
виконувались ці умови необхідно, щоб
![]()

Цей визначник можна складати також методом контурних струмів :

Умови пропускання реактивного фільтра
За типами елементів фільтри розділяються на: реактивні (вони складаються з елементів L та С); п’єзоелектричні (вони складаються з кварцових пластин); безінерційні (з елементів R та С) та інші.
У теорії реактивних фільтрів полягають, що активні опори конденсаторів та котушок індуктивності досить малі у порівнянні з їх реактивними опорами. Тому, фільтри подібного типу формуються тільки із реактивних елементів.
З визначення фільтра, як пасивного симетричного чотириполюсника з узгодженим навантаженням, випливає
![]() (1)
(1)
де коефіцієнт поширення g=a+jb, та
![]() (2)
(2)
Еквівалентні Т- та П-схеми чотириполюсника вказують, що параметр А визначається відношенням поздовжного опору до поперечного. При прийнятих позначеннях елементів Т- та П-схеми фільтра параметр А буде визначатися однією і той самою формулою
![]() (3)
(3)
Порівнюючи рівняння (2) та (3) запишемо
![]() (4)
(4)
У зоні пропускання коефіцієнт згасання а=0. При цьому g=jb та
![]() (5)
(5)
![]() (6)
(6)
Граничними значеннями cos b є -1 та +1. Отже, зона пропускання фільтра визначається в межах
![]() (7)
(7)
або
![]() (8)
(8)
У реактивному фільтрі Z1=jX1 та Z2=jX2. Тому, зону пропускання можна визначити у такому вигляді
![]() (9)
(9)
Нерівність (9) є необхідною та достатньою умовою існування зони пропускання. Як видно з (9), чотириполюсник стає фільтром, якщо реактивні опори Х1 та Х2 будуть мати протилежний характер та за абсолютним значенням
![]()
57. Класифікація радіотехнічних сигналів.
Радіотехнічний сигнал – це фізичний процес, що несе певну інформацію. Інформація (від лат. – роз’яснення) – це сукупність відомостей про який-небудь процес, подію або предмет, які зменшують невизначеність, що була в одержувача до здобуття ним інформації. Отже, якщо повідомлення не усуває невизначеності, то воно не несе інформації. Повідомлення – мате-ріальна форма подання інформації. У системах зв’язку під повідомленням розуміють електричну напругу чи електричний струм, що виникає на виході фізико-електричного давача, який перетворює енергію носія інформації на енергію електричних коливань. Повідомленням модулюють сигнал, який несе інформацію на необхідну відстань.
Для передачі інформації з одного пункту простору до іншого застосовують радіотехнічну систему передачі інформації, принципову структурну схему якої наведено на рис. 1.1. Основні елементи системи (радіоканалу) такі:
Давач – пристрій, в якому повідомлення перетворюється в електричний сигнал (мікрофон, давачі тиску чи температури тощо); кодер – пристрій, в якому сигнал від давача перетворюється в сигнал іншої форми, більш придатної для запам’ятовування й подальшої передачі. Наприклад, напруга давача температури перетворюється в послідовність імпульсів, які відповідають значенням температури в дискретні моменти часу; запам’ятовуючий пристрій (ЗП) зберігає закодований сигнал до початку його передачі. Наприклад, інформація на космічному кораблі накопичується безперервно протягом всього польоту, а передається у сеансах зв’язку; передавач сигналу складається з генератора коливань несучої частоти й модулятора;
генератор коливань несучої частоти (генератор) генерує гармонічні
високочастотні електромагнітні коливання, які спроможні поширюватися на великі відстані. Основною вимогою до генератора є висока стабільність частоти коливань, що ним генеруються; модулятор здійснює модуляцію одного чи кількох параметрів (амплітуди, частоти, фази та ін.) високочастотного коливання за законом повідомлення, що передається; передавальна антена випромінює високочастотні електромагнітні коливання, які промодульовані передавальним сигналом (повідомленням); приймальна антена приймає промодульовані високочастотні електромагнітні коливання, які потім поступають на вхід приймача. Приймач складається з вибіркового підсилювача, детектора, декодера й користувача інформації: вибірковий підсилювач (ВП) виділяє та підсилює з множини сигналів, які приймаються антеною, високочастотне модульоване коливання; детектор здійснює процес, зворотний модуляції, – виділяє з високочастотного модульованого коливання сигнал, яким у передавачі була здійснена модуляція; декодер – пристрій, що здійснює декодування прийнятого сигналу на форму, зручну для обробки користувачем інформації; користувач інформації (КІ) перетворює електричний сигнал в інформацію, подану в тій чи іншій формі, наприклад, у звук при передачі мови чи музики, у зображення при прийманні телевізійного сигналу, у запис на стрічку при телеметрії тощо.
Структурна схема каналу зв’язку (рис. 1.1) використовується при передачі даних з космічного супутника на Землю. У простіших випадках ряд операцій над сигналами і, зрозуміло, ряд блоків, зображених на рис.1.1, відсутні. У найпростішому каналі зв’язку можуть бути відсутні блоки кодування, запам’ятовування та декодування.
На сигнал, що передається радіотехнічним каналом, впливають завади.
Завада – це стороннє збурення, що заважає передачі, обробці та прийманню сигналу. Завада спричинює відхилення прийнятого повідомлення від переданого.
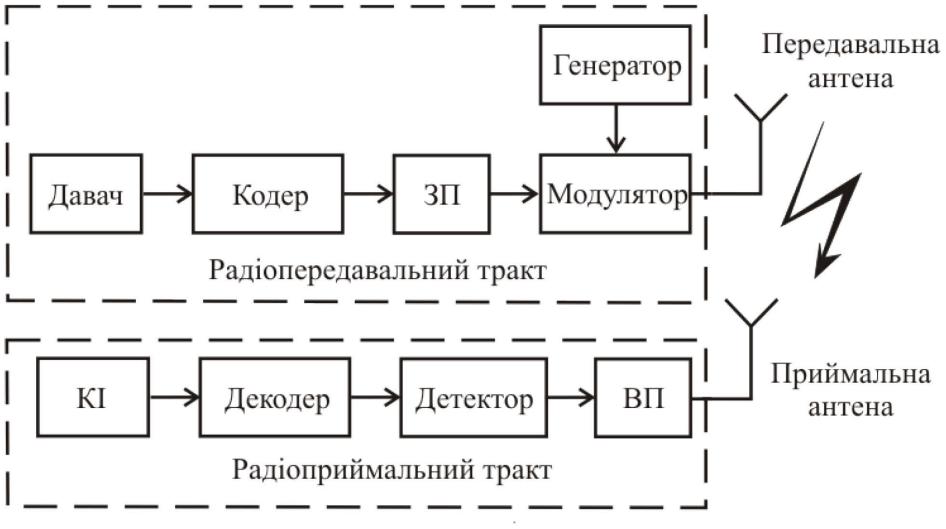 Рис.
1.1
Рис.
1.1
У передачі мови завади проявляються як тріск та шуми, які погіршують якість звучання. У телеграфії вони спотворюють повідомлення, що передається; в локації – зумовлюють пропуск реальної або виявлення неіснуючої цілі. У телевізійному приймачі вони спотворюють зображення. За належністю до систем зв’язку завади поділяють на зовнішні та внутрішні. Зовнішні завади зумовлені атмосферними явищами, процесами (космічні завади), що відбуваються на різних об’єктах Всесвіту, індустрійними завадами, завадами перешкоджаючих радіостанцій.
Внутрішні завади виникають внаслідок дискретної природи заряджених частинок. Це теплові шуми, шуми антени, дробовий шум електронного приладу.
Під дією завад сигнал, який проходить через радіоканал, спотворюється й
може бути розшифрований неправильно. Одна з головних проблем
організації каналу зв’язку – підвищення завадостійкості радіосистем, що
входять до складу каналу. Для радіосистеми передавання інформації,
завадостійкість кількісно визначають як здатність із заданою ймовірністю виділити повідомлення із суміші сигналу та завади, що надходять до місця приймання.
Радіосигнали класифікують за множиною ознак, які ґрунтуються на фізичних властивостях джерел сигналів, методах отримання або на найважливіших параметрах сигналів з погляду їх використання. Розглянемо провідні з них з точки зору теорії сигналів.
Сигнал стане об’єктом теоретичного аналізу й розрахунків, якщо вказати
спосіб математичного визначення його, тобто скласти його математичну
модель. Наприклад, формула
u(t)=Umcosωt –
це математична модель гармонічної напруги як функції часу. За своєю
природою радіосигнали є дійсними функціями часу. Однак у теорії сигналів і
при дослідженнях радіосистем широко використовують поняття
комплексного сигналу
![]()
Одномірні та багатомірні сигнали
У радіотехніці сигнал, який визначається однією функцією часу, прийнято називати одномірним. Прикладом таких сигналів служать напруга на затискувачах вітки або струм вітки.
Багатомірні або векторні сигнали
![]()
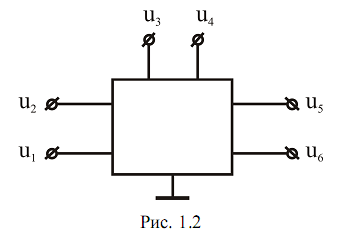
складаються з деякої множини одномірних сигналів. Ціле число N називається розмірністю сигналу. Багатомірним сигналом, наприклад, служить система напруг на полюсах багатополюсника (рис. 1.2)
Як правило, багатомірний сигнал являє собою упорядковану сукупність одномірних сигналів. Тому сигнали з різним упорядкуванням компонент неоднакові, тобто:
![]()
Детерміновані та випадкові сигнали
За ступенем невизначеності сигнали поділяють на детерміновані та випадкові. Якщо миттєві значення сигналу в будь-який момент часу t можуть бути визначені абсолютно точно, то такий сигнал належить до детермінованих.
Миттєві значення випадкових сигналів завчасно невідомі, оскільки
підпорядковуються вони лише статистичним закономірностям, через що
можуть бути передбачені тільки з деякою ймовірністю. Такими сигналами
є, наприклад, електрична напруга (струм), яка відповідає мові, музиці,
послідовності знаків телеграфного коду при передачі тексту, що не
повторюється. До випадкових сигналів можна віднести також послідовності
радіоімпульсів на вході радіолокаційного приймача, коли амплітуди
імпульсів та фази їх високочастотного заповнення змінюються зі зміною
умов розповсюдження, положення цілі та деяких інших причин. Можна
навести багато прикладів випадкових сигналів. Взагалі, будь-який сигнал, що
несе в собі інформацію, повинен розглядатися як випадковий. Поряд із
корисними випадковими сигналами в теорії та практиці доводиться мати
справу з випадковими завадами – шумами. Аналіз випадкових сигналів не можна відокремити від аналізу шумів. Корисні випадкові сигнали, а також завади часто об’єднують терміном «випадкові коливання» або «випадкові процеси».
Детерміновані (повністю відомі) сигнали не можуть бути носіями інформації. Однак між детермінованими та випадковими сигналами не існує нездоланної межі. Часто в умовах, коли рівень завад значно менший від рівня корисного сигналу з відомою формою, більш проста детермінована модель може бути цілком адекватною заданій задачі.
Періодичні та неперіодичні сигнали
За регулярністю повторення сигнали поділяють на періодичні та неперіодичні.
Для періодичного сигналу виконується співвідношення
f(t)=f(t+kT),
де k – будь-яке ціле число; Т – період.
Дуже важливий для радіотехніки клас неперіодичних сигналів, для яких f(t).f(t+kT) – це імпульсні сигнали, тобто коливання, обмеженні за часом. Серед імпульсних сигналів найбільш поширені відеоімпульси та радіоімпульси.
Відеоімпульс – це імпульс без заповнення несучою, який здебільшого є однобічним відхиленням від сталого (зокрема нульового) рівня (рис.1.3).
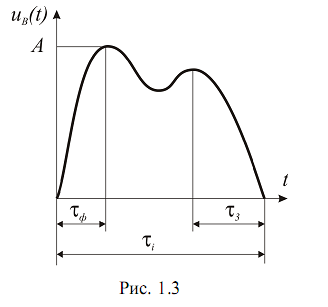
Параметрами
імпульсу прийнято вважати амплітуду
А, тривалість імпульсу
![]() ,
тривалість фронту
,
тривалість фронту
![]() та тривалість зрізу
та тривалість зрізу
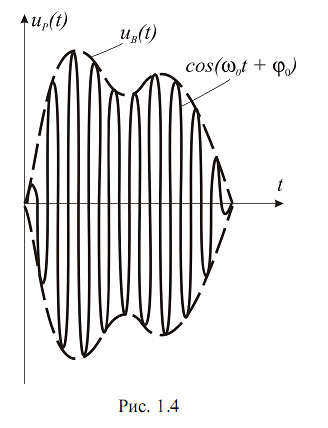
![]() Радіоімпульс – це скінченна послідовність
несучих коливань високої частоти,
обвідна якої має форму відеоімпульсу
(рис.1.4).
Радіоімпульс – це скінченна послідовність
несучих коливань високої частоти,
обвідна якої має форму відеоімпульсу
(рис.1.4).
Різниця між двома основними видами імпульсів така: якщо відеоімпульс
, то відповідний йому радіоімпульс
![]()
де
![]() – відповідно частота та початкова фаза,
фіксовані.
– відповідно частота та початкова фаза,
фіксовані.
Аналогові, дискретизовані та квантовані сигнали
За характером змінних сигнали поділяють на аналогові, дискретизовані та квантовані.
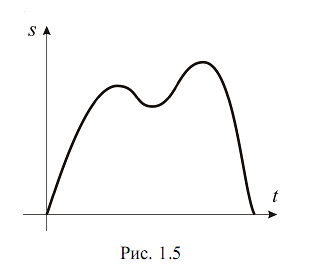
Аналоговий сигнал – це сигнал, довільний за значенням і неперервний за часом (рис. 1.5). Термін “аналоговий сигнал” підкреслює, що саме такий сигнал є аналогом певного фізичного процесу, який породжує даний сигнал; його миттєві значення можна виміряти в будь-який момент часу.
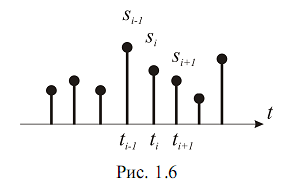
Дискретизований
сигнал – це сигнал, довільний за значенням
і дискретний за часом. Найпростіша
математична модель дискретизованого
сигналу
![]() – це множина відлікових значень {si} (i –
ціле число), кожне з яких визначено
моментом часу
– це множина відлікових значень {si} (i –
ціле число), кожне з яких визначено
моментом часу
![]() (рис. 1.6). Як правило, крок дискретизації
(рис. 1.6). Як правило, крок дискретизації
![]() для кожного сигналу – величина стала.
для кожного сигналу – величина стала.
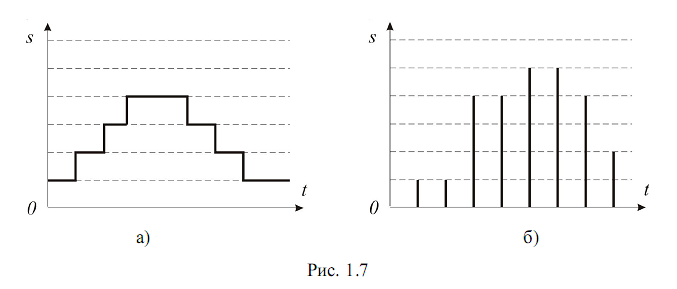
Квантований сигнал виглядає чи як дискретний за значенням і неперервний за часом (рис. 1.7, а), чи як дискретний за часом і квантований за рівнем (рис. 1.7, б).
Одна з головних переваг дискретизованих сигналів порівняно з аналоговими
– відсутність потреби відтворювати сигнал неперервно у всі
моменти часу. За рахунок цього виникає можливість передавати інформацію від кількох джерел по одній і тій самій радіолінії як лінії багатоканального зв’язку з розділенням каналів у часі.
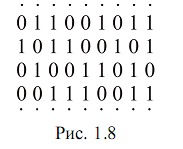
Квантування використовують для подачі сигналів у цифровій формі з допомогою цифрового кодування, оскільки рівні сигналів можна пронумерувати числами зі скінченою кількістю розрядів. З міркувань технічних зручностей реалізації та обробки сигналів звичайно користуються двійковою системою числення (рис. 1.8)
Дискретні значення сигналів у вигляді чисел можна відображати послідовністю відеоімпульсів. Двійкова система чисел ідеально пристосована для цієї процедури. Можна, наприклад, одиницею зображати високий потенціал, нулем – низький (рис. 1.9).
і відеочастотах). Сучасні досягнення мікроелектроніки здатні значно підвищити верхню межу частот, що обробляються.