

Карточка № 9.10 (296).
Механическая и рабочие характеристики двигателей постоянного тока независимого и параллельного возбуждения
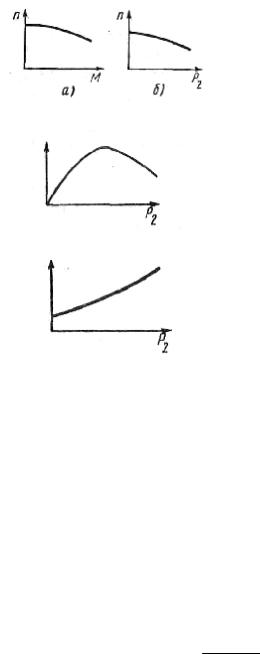
Укажите характеристики двигателя: а) механическую; б) |
а) п(Р2); б) п(М) |
|
120 |
|
рабочую |
|
|
|
|
а) п(М); б) М(Р2) |
|
131 |
||
|
а) п(Р2); б) М(Р2) |
|
166 |
|
Какие характеристики изображены на графиках? |
а), б) Рабочая |
|
|
170 |
|
а) Механическая; |
|
89 |
|
|
б) рабочая |
|
|
|
|
а) Рабочая; |
|
|
9 |
|
б) механическая |
|
|
|
|
Для ответа |
на |
вопрос |
132 |
|
недостаточно данных |
|
||
Какая из рабочих характеристик изображена на графике? |
М(Р2) |
|
|
123 |
|
Iя |
|
|
102 |
|
η(Р2) |
|
|
48 |
|
|
|
|
|
Какая из рабочих характеристик изображена на графике? |
М(Р2) |
|
|
147 |
|
Iя |
|
|
98 |
|
Любая из |
указанных |
145 |
|
|
ранее |
|
|
|
|
|
|
|
|
При какой нагрузке КПД двигателя достигает максимума? |
Номинальной |
|
|
73 |
|
Равной |
примерно |
83 |
|
|
половине номинальной |
|
||
|
|
|
|
|
|
Несколько |
|
большей |
124 |
|
номинальной |
|
|
|
|
|
|
|
|
§9.11. Регулирование частоты вращения двигателей постоянного тока независимого и параллельного возбуждения
Обратимся еще раз к основному уравнению электродвигателя U=E+IяRя. Выражение для ЭДС двигателя ничем не отличается от выражения для ЭДС генератора. Это и понятно: и в том и в другом случае проводники обмотки пересекают силовые линии магнитного поля. Тот факт, что якорь генератора раскручивается механической, а якорь двигателя — электромагнитной силами, с точки зрения закона электромагнитной индукции не имеет значения. Поэтому Е=сЕпФ и, следовательно, U=сЕпФ+IяRя. Отсюда частота вращения двигателя
n = U − Iя Rя
сEФ
С практической точки зрения важно представлять условия и способы регулирования частоты вращения двигателя. Выведенная формула позволяет решить эту задачу. Прежде всего отметим, что для уменьшения потерь мощности сопротивление обмотки якоря стремятся сделать по возможности малым (в реальных машиных оно составляет сотые или тысячные доли ом). В соответствии с этим и падение напряжения на активном сопротивлении якоря IяRя невелико по сравнению с напряжением сети. Поэтому в формуле для частоты вращения двигателя произведением IяRя можно пренебречь. Тогда п≈U/(сЕФ).
Таким образом, существует два способа плавного изменения частоты вращения двигателя в широких пределах: 1) изменение напряжения U, подведенного к якорю двигателя; 2) изменение магнитного потока возбуждения Ф (тока возбуждения Iв).
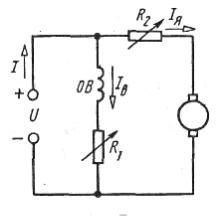
Рис. 9.27. Включение регулировочных реостатов в схему
двигателя постоянного тока параллельного возбуждения
На рис. 9.27 показано возможное подключение регулировочных реостатов к схеме двигателя. Увеличивая сопротивление R2 при постоянном напряжении сети U, уменьшаем напряжение, подведенное к якорю, и частоту вращения двигателя. Увеличивая сопротивление R1, уменьшаем ток возбуждения и магнитный поток возбуждения, а следовательно, увеличиваем частоту вращения двигателя.
Второй способ регулирования частоты вращения двигателя предпочтительнее, так как он связан с меньшими потерями энергии: ток возбуждения в десятки раз меньше тока якоря, а потери в регулировочном реостате пропорциональны квадрату тока. Однако при необходимости
изменения частоты вращения двигателя в очень широких пределах одновременно используют оба способа.
Возможность плавного и экономичного регулирования частоты вращения в широких пределах является важнейшим достоинством двигателей постоянного тока.
Во многих случаях возникает необходимость менять направление вращения якоря электродвигателя. Изменение направления вращения называют реверсированием.
Для реверсирования двигателя постоянного тока следует изменить направление магнитного потока возбуждения или тока якоря. При одновременном изменении направления потока
возбуждения и тока якоря за счет изменения полярности напряжения источника питания направление вращения якоря двигателя не меняется.
Реверсирование двигателей осуществляют с помощью переключателей в цепи якоря или в цепи возбуждения.
Выражение для частоты вращения двигателя показывает, что по мере уменьшения магнитного потока возбуждения частота неограниченно возрастает. С этой точки зрения опасен обрыв цепи возбуждения двигателя, при котором магнитный поток резко уменьшается до потока остаточного намагничивания, а двигатель идет «вразнос». Особенно вероятен режим «разноса» у ненагруженного двигателя. Режим «разноса» является аварийным: центробежные силы деформируют обмотку якоря, якорь заклинивается, а в некоторых случаях и разрушается.
У нагруженного двигателя увеличение частоты вращения происходит не столь резко, так
как уменьшение магнитного потока при постоянном моменте вращения
приводит к такому увеличению тока якоря, при котором произведением IяRя уже нельзя пренебрегать. Но и в этом случае обрыв цепи возбуждения может быть опасным.
Карточка № 9.11 (179).
Регулирование частоты вращения двигателей постоянного тока независимого и параллельного возбуждения
При |
постоянном |
напряжении питания магнитный поток |
Увеличилась |
34 |
||
возбуждения уменьшился. Как изменилась частота |
вращения |
|
|
|||
Не изменилась |
72 |
|||||
двигателя? |
|
|
|
|
|
|
|
|
|
Уменьшилась |
130 |
||
|
|
|
|
|
||
При прочих неизменных условиях напряжение, подведенное к |
Увеличилась |
78 |
||||
обмотке якоря, уменьшилось. Как изменилась частота вращения |
|
|
||||
Не изменилась |
57 |
|||||
двигателя? |
|
|
|
|
|
|
|
|
|
Уменьшилась |
164 |
||
|
|
|
|
|
||
Как изменится частота вращения двигателя при уменьшении: а) |
а) Увеличится; |
178 |
||||
R1; б) R2? |
|
|
|
б) уменьшится |
|
|
|
|
|
а) Уменьшится; |
154 |
||
|
|
|
|
|
||
|
|
|
|
|
б) увеличится |
|
|
|
|
|
|
|
|
Какой |
способ |
регулирования |
частоты |
вращения |
Оба способа примерно |
59 |
предпочтительнее в предыдущей задаче? |
|
|
равноценны |
|
||
|
|
|
|
|
Изменение R1 |
127 |
|
|
|
|
|
Изменение R2 |
86 |
Как изменяется частота вращения двигателя параллельного |
Двигатель |
161 |
||||
возбуждения при обрыве обмотки возбуждения в режиме |
останавливается |
|
||||
холостого хода? |
|
|
|
Частота резко возрастает |
100 |
|
|
|
|
|
|
|
|
§9.12. Двигатели постоянного тока последовательного и смешанного возбуждения
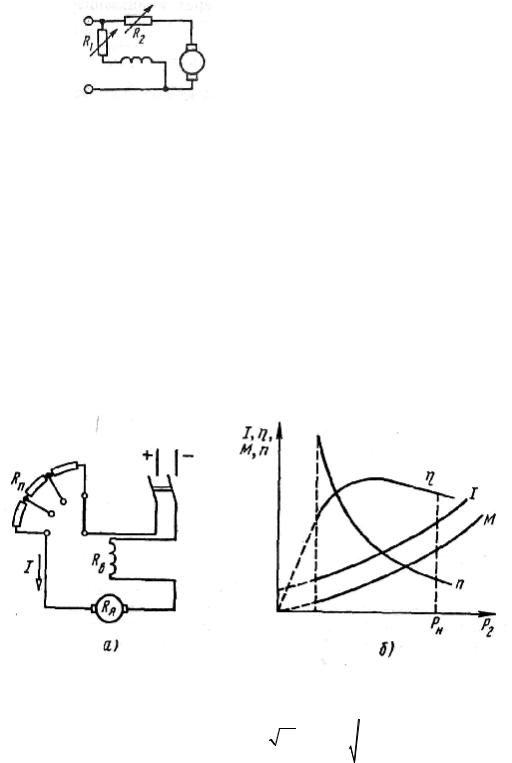
В двигателе последовательного возбуждения обмотка возбуждения включена последовательно с обмоткой якоря (рис. 9.28, а), поэтому магнитный поток Ф пропорционален I (если пренебречь насыщением магнитопровода) и в формуле М=смIФ следует положить Ф=kI, где k — постоянный коэффициент. Тогда М=cMkI2.
Вращающий момент двигателя последовательного возбуждения пропорционален квадрату
тока.
Рис. 9.28. Двигатель постоянного тока последовательного возбуждения: а — схема; б — рабочие характеристики
Выразим магнитный поток через вращающий момент:
М = |
см |
Ф2 ; Ф = k |
|
; |
k = |
|
k |
|
М |
||||||||
|
|
|||||||
|
k |
1 |
|
|
1 |
|
cм |
|
|
|
|
|
|
|
и подставим в приближенное выражение для частоты вращения двигателя:
n ≈ |
U |
= |
Г |
|||
c |
Ф |
|
|
|||
c k М |
||||||
|
|
|||||
|
E |
|
|
E 1 |
||
Таким образом, для двигателя последовательного возбуждения опасен режим холостого хода, так как при уменьшении момента на валу до нуля частота вращения неограниченно увеличивается (рис. 9.28, б) и двигатель идет «вразнос». Это обстоятельство требует такого сочленения двигателя последовательного возбуждения с рабочей машиной, при котором режим холостого хода был бы исключен. В частности, нельзя применять ременную передачу, так как при ослаблении или обрыве ремня может возникнуть аварийный режим.
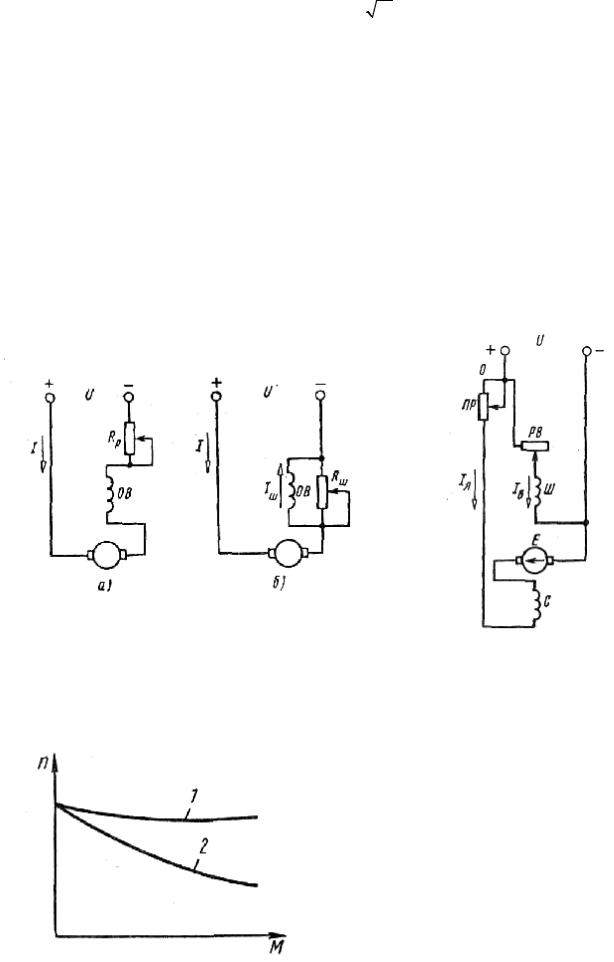
Частоту вращения двигателя последовательного возбуждения можно регулировать либо изменением подводимого напряжения (рис. 9.29, а), либо изменением магнитного потока возбуждения за счет шунтирования обмотки возбуждения (рис. 9.29, б). Второй способ более экономичен.
Двигатель последовательного возбуждения имеет существенные преимущества вследствие квадратичной зависимости вращающего момента от тока. Так, например, он развивает большой пусковой момент, это очень важно для электропривода на транспорте (благодаря этому электропоезд способен быстро набирать скорость после остановки). Однако резко выраженная зависимость частоты вращения от нагрузки и опасность «разноса» ограничивают область применения этих двигателей.
Рис. 9.29. Схемы регулировки частоты вращения двигателей |
Рис. 9.30.Электрическая схема двигателя |
|
последовательного возбуждения: а — изменением подводимого |
||
смешанного возбуждения |
||
напряжения; б—шунтированием обмотки возбуждения |
||
|
Указанных недостатков лишены двигатели смешанного возбуждения (рис. 9.30).
Характеристики этих двигателей являются промежуточными между характеристиками двигателей параллельного и последовательного возбуждения.
Рис. 9.31. Механические характеристики компаундного двигателя при встречном (кривая 1) и согласном (кривая 2) включении обмоток возбуждения
При согласном включении последовательной и параллельной обмоток возбуждения двигатель смешанного возбуждения имеет больший пусковой момент по сравнению с шунтовым
двигателем. При встречном включении обмоток возбуждения двигатель имеет жесткую механическую характеристику. С увеличением нагрузки магнитный поток сериесной обмотки увеличивается и, вычитаясь из потока шунтовой обмотки, уменьшает общий поток возбуждения. При этом частота вращения двигателя не только не уменьшается, а может даже увеличиться (рис. 9.31). И в том и в другом случае наличие магнитного потока шунтовой обмотки исключает режим «разноса» двигателя при снятии нагрузки.
Регулирование частоты вращения двигателя смешанного возбуждения осуществляют регулировочным реостатом в цепи шунтовой обмотки.
Двигатели смешанного возбуждения применяют в качестве тяговых и крановых двигателей, а также для привода прокатных станов, компрессоров, насосов.
Машины постоянного тока экономичны. Их КПД при номинальной нагрузке составляет 75% и выше. Чем больше номинальная мощность машины, тем выше ее КПД. У машин мощностью 100 кВт КПД достигает 92%.
Карточка № 9.12 (230).
Двигатели постоянного тока последовательного и смешанного возбуждения
Как |
изменится |
вращающий |
момент |
двигателя |
Увеличится в 3 раза |
74 |
последовательного возбуждения, если его ток увеличится в 3 |
|
|
||||
Увеличится в 9 раз |
26 |
|||||
раза (насыщением магнитопровода пренебречь)? |
|
|
|
|||
|
|
|
||||
Во сколько раз пусковой момент двигателя последовательного |
В 5 раз |
69 |
||||
возбуждения больше номинального момента, если пусковой |
|
|
||||
В 25 раз |
53 |
|||||
ток превышает номинальный в 5 раз? |
|
|
|
|
||
|
|
|
|
|||
Что произойдет, если двигатель |
последовательного |
Двигатель не запустится |
51 |
|||
возбуждения подключить к сети при отключенной |
|
|
||||
механической нагрузке на валу? |
|
|
Обмотка якоря перегреется |
63 |
||
|
|
|
|
|
|
|
|
|
|
|
|
Двигатель пойдет «вразнос» |
149 |
|
|
|
||||
Как изменится частота вращения двигателя при увеличении |
Увеличится |
1 |
||||
сопротивления R? |
|
|
|
|
|
|
|
|
|
Уменьшится |
81 |
||
|
|
|
||||
Какая кривая является рабочей характеристикой двигателя |
а) Кривая 1; |
136 |
||||
смешанного возбуждения: а) с согласным |
включением |
б) кривая 2 |
|
|||
обмоток возбуждения; б) со встречным включением обмоток |
|
|
||||
возбуждения? |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
а) Кривая 2; |
21 |
|
|
|
|
|
б) кривая 1 |
|
|
|
|
|
|
|
|