

МЕХАНИКА
Учебное пособие
Воронеж 2020
МИНИСТЕРСТВО НАУКИ И ВЫСШЕГО ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение высшего образования «Воронежский государственный технический университет»
МЕХАНИКА
Учебное пособие
Издание четвертое, переработанное и дополненное
Воронеж 2020
УДК 531.8(075.8) ББК 22.3я7
М550
Рецензенты:
кафедра социально-гуманитарных, естественно-научных и общепрофессиональных дисциплин филиала РГУПС в г. Воронеж
(зав. кафедрой канд. техн. наук, доц. О. А. Лукин); канд. техн. наук, доц. О. Ю. Давыдов
Авторский коллектив:
Ю. Б. Рукин, Р. А. Жилин, Д. В. Хван, А. А. Воропаев, В. А. Рябцев
Механика: учебное пособие / Ю. Б. Рукин и [и др.]. -
М550 4-е изд., перераб. и доп.; ФГБОУ ВО «Воронежский государственный технический университет». – Воронеж:
Изд-во ВГТУ, 2020. – 197 с. ISBN 978-5-7731-0865-8
В учебном пособии рассматриваются основные вопросы дисциплин, входящих в курс «Механика»: «Теория механизмов и машин», «Сопротивление материалов» и «Детали машин».
Издание предназначено для студентов направления 14.03.01 «Ядерная энергетика и теплофизика» (профиль «Техника и физика низких температур») третьего курса очной формы обучения при изучении дисциплины «Механика».
Табл. 3. Ил. 124. Библиогр.: 22 назв.
УДК 531.8(075.8) ББК 22.3я7
Печатается по решению редакционно-издательского совета Воронежского государственного технического университета
ISBN 978-5-7731-0865-8 |
ФГБОУ ВО «Воронежский |
|
государственный технический |
|
университет», 2020 |
ВВЕДЕНИЕ
Слово «механика» имеет древнегреческое происхождение. Mechane – первоначально означало подъ мные машины и остальные механизмы, которые могли достаточно высоко поднимать большие тяжести.
В античное время использовались мощные подъ мные устройства – «вороны». С их помощью осажд нные в городах крепостях, при атаке с моря перев ртывали и ломали корабли. А штурмующие при помощи этих устройств поднимали на платформах-ящиках лучников, которые обстреливали осаж- д нных. Уже в V веке до нашей эры в афинской армии применялись огромные тараны. Для метания больших стрел пользовались катапультами; прототипом пулем та был полибол для непрерывного метания стрел; балисты служили для метания камней. Были созданы специальные прицельные приспособления и приборы для изменения траектории.
Вс это привело к тому, что термин « mechane» распространился на метательные и вообще на любые искусно придуманные машины и механизмы.
В настоящее время «механикой» называют науку о всех видах механического движения.
Обучение по профилю «Техника и физика низких темпе-
ратур» направления «Ядерная энергетика и теплофизика» со-
гласно требованиям Федерального государственного образовательного стандарта высшего образования требует от инженера (специалиста) следующих знаний по дисциплине «Механика»:
«Машины и механизмы; кинематический и силовой анализ, взаимозаменяемость, передачи механического движения, проектирование передач; основные понятия о системах автоматизированного проектирования; валы и оси; нагрузки, расчетные схемы; подшипники качения и скольжения; механизмы для передачи движения в герметизированное пространство; поршневые компрессоры и детандеры; мембранные компрессоры; методы расчета сосудов и фланцевых соединений; ременные передачи; разъемные и неразъемные соединения; муфты, их подбор и конструирование».
3
Курс «Механика» включает разделы смежных дисциплин: «Теория механизмов и машин», «Сопротивление материалов» и «Детали машин и основы проектирования». В данном пособии также рассмотрены некоторые вопросы дискретного моделирования, реализуемые в современных системах автоматизированного проектирования.
1.СТРУКТУРА МЕХАНИЗМОВ
1.1.Основные понятия и определения
втеории механизмов и машин
Машина состоит из отдельных механизмов, а механизм состоит из отдельных деталей. Одни из деталей приняты за неподвижные, а другие движутся относительно них. Так, в двигателе самолета или машины за неподвижные принимаются те детали, которые соединены жестко с корпусом самолета или машины. Это корпус двигателя, подшипники коленчатого вала. Подвижные детали – коленчатый вал (кривошип), шатуны, поршни и другие детали.
Каждая подвижная деталь или группа деталей, образующая одну жесткую подвижную систему тел (пример – шатун с разъемными крышками), носит название подвижного звена механизма. Например, вал, шатун, ползун – это подвижные звенья механизма. Все неподвижные детали образуют одну неподвижную систему тел, называемую неподвижным звеном или стойкой. Например, корпус самолета, с ним жестко связан корпус двигателя – все это одно звено – стойка. В любом механизме всегда есть одно неподвижное звено и одно или несколько подвижных звеньев. Следовательно, механизм это есть совокупность неподвижного и подвижных звеньев.
Из подвижных звеньев в механизме необходимо выделить входные и выходные звенья.
Входным звеном называется звено, которому сообщается заданное движение, преобразуемое механизмом в требуемое движение других звеньев.
4
Выходным звеном называется звено, совершающее движение, для выполнения которого предназначен механизм. Все остальные звенья называются соединительными или промежуточными.
Подвижные звенья соединены между собой и со стойкой так, что возможно движениеодного звенаотносительно другого.
Соединение двух звеньев, допускающее их относительное движение, называется кинематической парой. Например, ки-
нематическими парами являются места соединения коленчатого вала с корпусом, кривошипа и шатуна, шатуна и ползуна. Поверхности, линии, точки, по которым соприкасаются звенья,
называются элементами кинематической пары.
Связанная система звеньев, образующих кинематические пары, называется кинематической цепью.
В основе всякого механизма лежит кинематическая цепь, но не всякая кинематическая цепь является механизмом. Кинематическая цепь, обладающая определенным заданным движением, является механизмом.
1.2. Классификация кинематических пар
Классификацию кинематических пар можно провести по числу степеней свободы и по числу условий связи.
Числом степеней свободы механической системы назы-
вается число независимых перемещений.
Твердое тело имеет в пространстве шесть (рис. 1.1) независимых движений: три вращательных и три поступательных, т.е. Н – число степеней свободы такого тела равно 6, Н = 6.
Если тело (звено) соединить подвижно с другим телом (звеном), то на движение этих звеньев будут наложены ограничения, которые носят названия условий связи в кинематической паре. Число условий связи в кинематической паре зависит от способа соединения звеньев в кинематические пары. Число условий
связи S изменяется от 1 до 5, т.е. 1≤ S ≤5. Если на тело налагается шесть условий связи, то тело лишается возможности двигаться.
5
 z
z
x |
y |
|
Рис. 1.1 |
Степень свободы звена в кинематической паре можно определить как H = 6 – S. Число степеней свободы звена в паре
может меняться от 1 до 5, т.е. 1≤ H ≤5.
Все кинематические пары делят на пять классов. Класс кинематической пары определяется числом условий связи, наложенных на относительное движение звеньев. Класс пары может быть определен и числом степеней свободы. Рассмотрим примеры пяти классов кинематических пар.
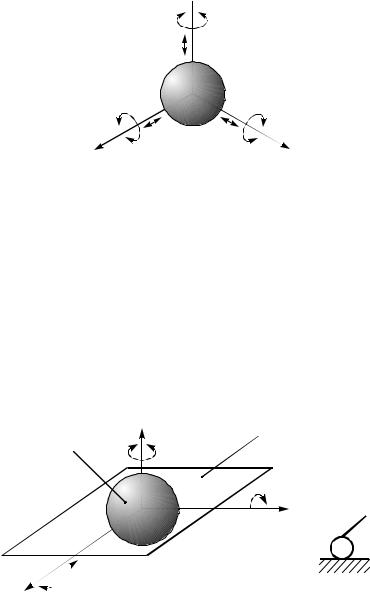
Создадим кинематическую пару, положив шар на плоскость. Этим лишим шар одного из шести возможных движ е- ний, шар не может перемещаться по оси z, т.е. на его движение наложено одно ограничение (одно условие связи). Такая пара названа парой 1 класса или пятиподвижной (рис. 1.2).
2 |
z |
1 |
H=5; S=1


 y
y
x


Рис. 1.2
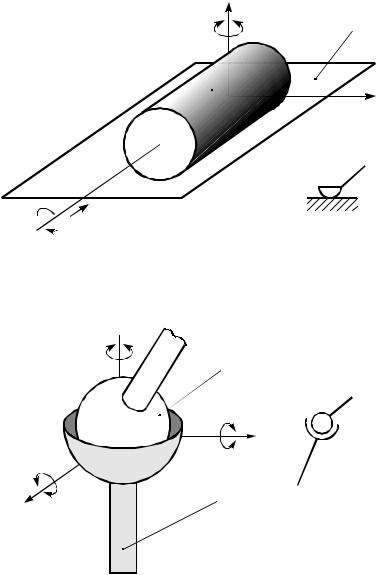
Цилиндр на плоскости. Н=4; S=2 – пара II класса или че-
тырехподвижная (рис. 1.3).
6
2 |
y |
1 |
|
||
|
|

 z
z
x


Рис. 1.3
Сферическая пара. Н=3; S=3 – пара III класса или трехподвижная (рис. 1.4).
y 
1
1
z
2 2
x
Рис. 1.4
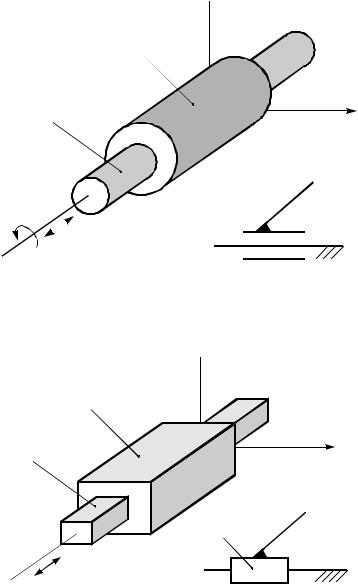
Цилиндрическая пара. Н=2; S=4 – пара IV класса или двухподвижная (рис. 1.5).
7
 y
y
2
1 |
z |
|
2
1
 x
x
Рис. 1.5
Поступательная пара. Н=1; S=5 – пара 5-го класса, од-
ноподвижная поступательная (рис. 1.6).
y 
2
1 |
z |
2
1
 x
x
Рис. 1.6
Кроме предложенной классификации кинематических пар, существует деление на высшие и низшие кинематические пары.
8
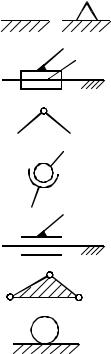
На рис.1.7 приведены обозначения некоторых кинематических пар, используемые при изображении кинематических цепей.
|
|
|
|
2 |
|
неподвижное звено |
1 |
|
|
|
|
подвижное звено 2, |
|
|
|
|
|
|
||
|
|
|
|
|
поступательная пара V класса |
|
|
|
|
|
|
|
|
1 |
2 |
|
|
вращательная пара V класса |
||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
вращательная пара III класса |
|
|
|
|
|
|
|
2 |
2 |
|
|
|
||
1 |
|
|
|
цилиндрическая пара IV класса |
||
|
|
|
|
|
||
|
|
|
|
|
|
звено, входящее в три |
|
|
|
|
|
|
кинематические пары |
высшая кинематическая пара I класса
Рис. 1.7. Условные обозначения, используемые в ТММ
Высшей кинематической парой является пара, в которой элементами пары является линия или точка. В низшей кинематической паре элементами пары являются поверхности. Примерами высших пар являются колесо и рельс, зацепление зубчатых колес и др. Низшие пары: сферическая, цилиндрическая, поступательная. Чтобы элементы кинематических пар находились в постоянном контакте, необходимо их замыкание. Замыкание может быть кинематическим (геометрическим) конструктивным и силовым (сила веса, пружины).
Система звеньев, образующая между собой кинематиче-
ские пары, называется кинематической цепью.
9