

В этих условиях электромагнитный момент станет отрицатель- |
||||||||
ным, и частота вращения якоря будет уменьшаться, пока не достигнет |
||||||||
нулевого значения. Если в этот момент цепь якоря не отключить от |
||||||||
сети, то произойдет реверсирование двигателя и его якорь под дейст- |
||||||||
вием момента, который прежде был тормозным, начнёт вращение в |
||||||||
противоположную сторону, поэтому операцию торможения проти- |
||||||||
вовключением автоматизируют, чтобы при нулевом значении частоты |
||||||||
вращения цепь якоря отключалась от сети. |
|
|
|
|
||||
+ |
U |
– |
|
|
IЯ |
EЯ |
|
RЯ |
E1 |
E2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
СA1 |
IВ |
|
|
A1 |
|
|
A2 |
|
|
S1 |
|
|
|
S1 |
|
|
|
|
IЯ |
RТ |
|
|
RТ |
|
||
|
|
|
|
|
||||
а |
ЕЯ |
+UЯ |
|
б |
+ |
|
|
– |
иRЯ |
|
|
|
U |
||||
|
|
E1 |
|
E2 |
||||
|
n |
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
|
|
|
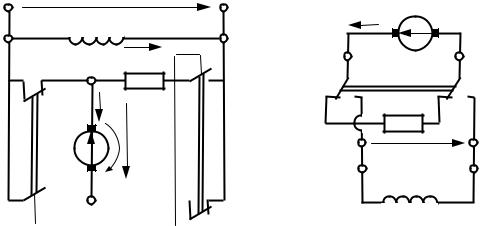
Рис. 9.23. Схемы торможения двигателя с параллельным возбуждением: |
||||||||
|
б |
|
|
|
|
|
||
а – торможение противовключением; |
б – динамическое торможение |
|||||||
При динамическом торможении двигателя параллельного воз- |
||||||||
буждения цепь якоря отключают от источника питания и замыкают на |
||||||||
тормозное сопротивлениеАRТ (рис. 9.23, б). ПротивоЭ |
С якоря EЯ не |
|||||||
меняет своего направления, но поскольку якорь отключен от сети |
||||||||
(UЯ = 0), ток якоря изменит направление на противоположное, так как |
||||||||
будет создаваться только противоЭДС, и машина переходит в генера- |
||||||||
торный режим, работая на нагрузочное сопротивление. При этом |
||||||||
электромагнитный момент двигателяДтакже изменит направление и |
||||||||
станет тормозным (генераторным). Данный тормозящий момент ис- |
||||||||
чезнет вместе с противоЭДС якоря EЯ, т.е. с остановкой якоря (n = 0). |
||||||||
9.11. Регулирование частоты вращения двигателей постоянного тока |
||||||||
|
|
|
|
|
И |
|||
Рассмотренные в подр. 9.9 характеристики двигателей постоян- |
||||||||
ного тока позволяют сделать заключение, что частоту вращения мож- |
||||||||
но регулировать тремя способами [7, 12]: |
|
|
|
|
|
|||
• |
изменением (ослаблением) магнитного потока машины; |
|||||||
• изменением сопротивления в цепи якоря (тока якоря); |
||||||||
• |
изменением подводимого напряжения. |
|
|
|
||||
253
Наиболее экономичным является способ регулирования ослаб- |
|||||||||
лением магнитного потока Ф, т.е. снижение тока IВ в обмотке возбуж- |
|||||||||
дения. Такой способ работает только на повышение частоты враще- |
|||||||||
ния. уменьшением Ф, согласно формулам (9.27) и (9.28), частота |
|||||||||
вращения возрастает по отношению к номинальной. Однако верхний |
|||||||||
предел регулирования частоты вращения ограничен механической |
|||||||||
прочностью машины, поэтому уменьшать ток возбуждения следует |
|||||||||
осторожно, чтобы не допустить аварийной ситуации. Это обстоятель- |
|||||||||
ство является недостатком данного способа регулирования. |
|||||||||
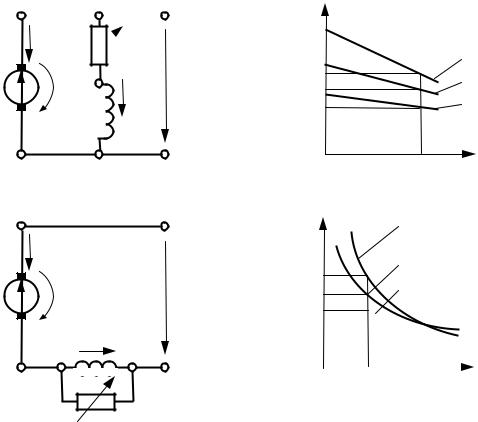
В дв гателях параллельного возбуждения ослабление магнитно- |
|||||||||
го потока (р с. 9.24, а) вызывает обратно пропорциональное измене- |
|||||||||
С |
|
|
|
|
|
|
|||
частоты |
|
деального холостого хода n0, поэтому искусственные |
|||||||
механ ческ е характер стики, |
полученные при различных значениях |
||||||||
тока возбужден я, пересекают ось ординат в разных точках. Кроме |
|||||||||
того, при уменьшен |
магнитного потока снижаются жёсткость ха- |
||||||||
рактер ст к |
|
пусковой момент, что необходимо учитывать при вы- |
|||||||
ние |
|
|
|
|
|||||
боре реж ма |
|
|
|
пуске двигателя. |
|
|
|
||
A1 |
|
|
|
|
+ |
|
|
|
|
|
работы n |
|
|
||||||
|
IЯ |
|
|
RД |
|
|
|
|
IВ2 < IВ1 |
ЕЯ |
|
|
|
|
|
n2 |
|
||
|
|
|
|
|
|
|
|||
|
|
E1 |
|
U |
а |
|
IВ1 < IВН |
||
RЯ |
|
IВ |
n1 |
|
|||||
|
n |
|
|
|
|
nн |
|
IВН |
|
|
|
|
|
А |
|
||||
A2 |
|
|
E2 |
|
– |
|
0 |
MН |
M |
A1 |
|
|
|
|
+ |
|
|
IВ2 < IВ1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Д |
|||
|
IЯ |
|
|
|
|
|
n |
|
|
|
|
|
|
|
|
|
IВ1 < IВН |
||
ЕЯ |
|
|
|
|
|
|
n2 |
||
|
|
|
|
|
|
IВН |
|
||
|
|
|
|
|
U |
б |
n1 |
|
|
RЯ |
|
n |
|
|
nн |
И |
|||
|
IВ |
|
|
|
|
||||
|
D1 |
D2 |
|
|
|||||
|
|
|
|
||||||
|
|
|
|
|
|
||||
A2 |
|
|
|
|
– |
|
0 |
MН |
MД |
|
|
|
RД |
|
|
|
|
|
|
Рис. 9.24. Схемы и характеристики ДПТ при изменении магнитного потока: |
|||||||||
а – с параллельным возбуждением; б – с последовательным возбуждением |
|||||||||
|
|
|
|
|
|
254 |
|
|
|
В двигателях последовательного возбуждения также возможно регулирование частоты вращения ослаблением магнитного потока. Для этого обмотку возбуждения шунтируют резистором RД (рис. 9.24, б). Изменение сопротивления резистора приводит к пере-
распределению тока якоря IЯ между обмоткой возбуждения и шунтом, |
|
вызывая уменьшение тока возбуждения IВ при уменьшении сопротив- |
|
С |
|
ления RД. |
|
В двигателях смешанного возбуждения регулирование произво- |
|
дят изменен ем тока параллельной обмотки. Реакция машины на ос- |
|
лаблен е магн тного потока здесь такая же, как в двигателях парал- |
|
иусилвается |
скрен е, поэтому диапазон регулирования частоты |
лельного возбужден я. |
|
Ослаблен е магн тного потока приводит к неустойчивой работе |
|
двигателя. При |
уменьшении магнитного потока пропорционально |
должен сн жаться допустимый нагрузочный момент для сохранения номинальных значен й тока якоря и мощности двигателя. Кроме того, при повышен частоты вращения ухудшаются условия коммутации
вращен я при данном спосо е составляет (1,0 – 2,0)nн. |
|
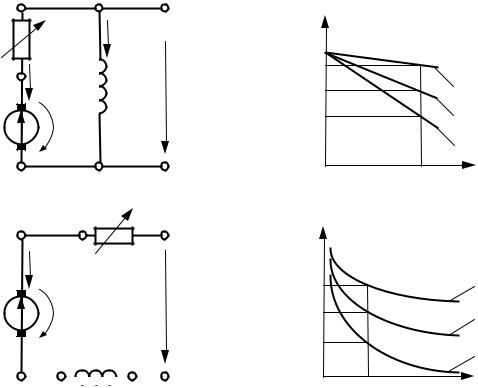
Другой способ регулирования частоты вращения заключается во |
|
введении |
го сопротивления RД в цепь якоря двигателя, т.е. |
снижении тока якоря IЯ. В двигателе параллельного и независимого |
|
|
добавочно |
возбуждения включениеАрегулировочного резистора никак не влияет
на частоту идеального холостого хода n0, поэтому при постоянном
R n
потоке возбуждения независимоДот величины 0 = const. В то же время жёсткость характеристик h обратно пропорциональна величине
RД. Значит, максимально возможная жёсткость соответствует естественным характеристикам. Из изложенного следует, что все механические характеристики пересекаются в точке холостого хода и по мере
роста RД их наклон увеличивается (рис. 9.25).И Теоретически, увеличивая R , можно понижать частоту враще-
ния вплоть до нуля, но в этом случае механическая характеристика становится настолько «мягкая», что работа на ней протекает нестабильно, с большими колебаниями частоты вращения при относительно малых изменениях нагрузки, поэтому диапазон регулирования частоты вращения при данном способе составляет (0,5 – 1,0)nн.
Недостатками такого способа регулирования частоты вращения являются:
1)большие потери мощности на добавочном сопротивлении;
2)уменьшение жёсткости механических характеристик;
3) процесс регулирования идёт только в сторону уменьшения частоты вращения относительно номинальной.
255
|
E1 |
|
+ |
|
|
|
|
|
|
RД |
IВ |
|
|
n |
|
|
|
|
|
|
|
nн |
|
|
|
|
A1 |
IЯ |
|
|
|
|
|
IЯН |
|
|
U |
а |
n1 |
|
|
|||
ЕЯ |
|
|
|
|
||||
n |
|
n2 |
|
|
IЯ1 < IЯН |
|||
|
|
|
|
|
|
|||
RЯ |
|
|
|
|
|
|
|
IЯ2 < IЯ1 |
A2 |
E2 |
|
– |
|
0 |
MН |
MД |
|
A1 |
|
|
+ |
|
|
|
|
|
С |
RД |
|
|
n |
|
|
|
|
|
IЯ = IВ |
|
|
|
nн |
|
|
IЯН |
ЕЯ |
|
|
U |
|
|
|
||
R |
|
|
|
n1 |
|
|
IЯ1 < IЯН |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
иЯ n |
|
n2 |
|
|
IЯ2 < IЯ1 |
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
A2 |
D1 |
D2 |
– |
|
0 |
|
MН |
MД |
Рис. 9.25.бСхемы и характеристики ДПТ при изменении тока якоря: |
||||||||
а – с параллельным воз уждением; |
– с последовательным возбуждением |
|||||||
Третьим параметром, влияющим на частоту вращения ДПТ, яв- |
||||||||
ляется напряжение UАЯ, подводимое к якорю машины. Поскольку ра- |
||||||||
бота двигателя при UЯ |
> UЯН недопустима, то изменение частоты воз- |
|||||||
можно только в сторону её понижения. |
|
|
|
|
||||
В последнее время в качестве регулируемых источников питания |
||||||||
ДПТ применяются в основном импульсные полупроводниковые преоб- |
||||||||
|
|
|
Д |
|||||
разователи. При питании от сети постоянного тока используют широт- |
||||||||
но-импульсные регуляторы (ШИР), а при питании от сети переменного |
||||||||
тока – управляемые выпрямители (УВ) [12]. |
|
|
|
|||||
Принцип широтно-импульсного регулирования заключается в |
||||||||
формировании импульсов напряжения UЯ(t) длительностью ti постоян- |
||||||||
|
|
|
|
|
|
|
И |
|
ной частотой f. Ток якоря IЯ из-за собственной индуктивности имеет |
||||||||
пульсирующий характер. Его можно разложить на постоянную состав- |
||||||||
ляющую +IЯ и переменную составляющую |
|
IЯ. Вращающий момент |
||||||
создаётся постоянной составляющей тока, |
которая будет зависеть от |
|||||||
|
|
|
||||||
скважности импульсов напряжения S. Из-за переменной составляющей |
||||||||
тока якоря приходится несколько снижать мощность двигателя или |
||||||||
|
|
|
|
256 |
|
|
|
|

включать в цепь якоря дроссель, уменьшающий пульсации тока. Кроме |
|||||||||||
того, пульсации тока вызывают соответствующие пульсации электро- |
|||||||||||
магнитного момента и соответственно частоты вращения. |
|
||||||||||
|
Механические характеристики двигателя параллельного возбу- |
||||||||||
ждения при изменении напряжения UЯ |
смещаются параллельно, со- |
||||||||||
храняя жёсткость (рис. 9.26, а). Такая реакция на управляющее воз- |
|||||||||||
действие является оптимальной для построения регулируемых и ав- |
|||||||||||
томатизированных электроприводов. |
|
|
|
||||||||
|
E1 |
|
|
|
|
|
+ |
|
|
|
|
|
IВ |
A1 |
|
|
ШИР |
S |
|
|
n |
|
|
С |
|
|
|
|
nн |
|
|
||||
|
|
|
IЯ |
|
|
|
|
|
|
UЯН |
|
|
|
ЕЯ |
|
|
|
|
U |
а |
n1 |
|
|
|
|
|
UЯ |
|
|
UЯ1 < UЯН |
|||||
|
|
|
|
|
|
|
n2 |
|
|||
|
|
RЯ |
|
|
|
|
|
|
|
UЯ2 < UЯ1 |
|
|
|
n |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
||
и |
|
|
0 |
MН |
MД |
||||||
|
E2 |
A2 |
|
|
|
|
– |
|
|||
|
A1 |
|
|
+ |
|
|
|
|
|
|
|
|
|
б |
n |
|
|
||||||
|
IЯ = IВ |
|
|
|
|
|
|
|
|
|
|
ЕЯ |
|
UЯ |
|
|
УВ |
UУ |
~U |
б |
nн |
|
UЯН |
|
|
|
|
|
n1 |
|
UЯ1 < UЯН |
||||
RЯ |
|
|
|
|
|
|
|
||||
n |
|
|
|
Аn2 |
UЯ2 < UЯ1 |
||||||
|
|
|
D2– |
||||||||
|
A2 D1 |
|
|
|
|
|
0 |
MН |
MД |
||
Рис. 9.26. Схемы и характеристики |
при изменении напряжения якоря: |
||||||||||
а – с параллельным возбуждением;ДПТб – с последовательным возбуждением |
|||||||||||
|
Для двигателей последовательного возбуждения применяются |
||||||||||
тиристорные управляемые выпрямители (рис. 9.26, б). Регулирование |
|||||||||||
напряжения осуществляется посредством управляющего сигнала в ви- |
|||||||||||
|
|
|
|
|
|
|
|
|
|
И |
|
де импульсов напряжения UУ, подаваемого на тиристоры выпрямителя. |
|||||||||||
Очевидно, что жёсткость характеристик в зависимости от UЯ меняется, |
|||||||||||
но в ограниченном диапазоне нагрузок, вблизи номинального значения |
|||||||||||
момента, можно считать, что они смещаются параллельно. |
|||||||||||
|
Изменением подводимого напряжения можно получить диапа- |
||||||||||
зон регулирования частоты вращения (0,1 – 1)nн. |
|
||||||||||
257