

Чем жёстче характеристика, тем меньше изменение частоты вращения при изменении нагрузки на валу двигателя. Механическая характеристика АД общепромышленного назначения является жёсткой, т.к. номинальные значения скольжения находятся в диапазоне 0,02 – 0,05. Это означает, что при изменении нагрузочного момента от нуля
Сдо номинального значения скорость меняется на 2,5%.
7.7. Пуск трёхфазных асинхронных двигателей
Пуск ас нхронного двигателя сопровождается переходным про- нимцессом, обусловленным переходом ротора и механически связанных с
частей сполн тельного механизма из состояния покоя в состоя-
ние равномерного вращения, когда вращающий момент двигателя уравновеш вается суммой противодействующих моментов, действующ х на ротор дв гателя. Пусковые свойства двигателя определяются в первую очередь значением пускового тока статора I1П и значением пускового момента МП [7].
При пускебдв гателя должны по возможности удовлетворяться следующие основныеАтре ования: процесс пуска должен быть простым и осуществляться ез сложных пусковых устройств, пусковой момент должен ыть достаточно ольшим, а пусковые токи – по возможности малыми. Однако получение такого сочетания пусковых параметров в АД сопряжено с определенными трудностями, а иногда оказывается невозможным.
Для того чтобы двигатель пришёлДв движение и достиг требуемой скорости, необходимо, чтобы в процессе пуска его вращающий момент был больше момента нагрузки. При этом разность между моментом двигателя и моментом нагрузки при Ипрочих равных условиях определяет величину ускорения, с которым происходит пуск, т.е. его длительность. Слишком большое ускорение может быть опасным для механизма и трансмиссии, а слишком длительный пуск вызывает быстрый нагрев обмоток и может привести к выходу из строя двигателя. Причём кроме разности вращающих моментов на длительность пуска большое влияние оказывает величина присоединённых к ротору маховых масс.
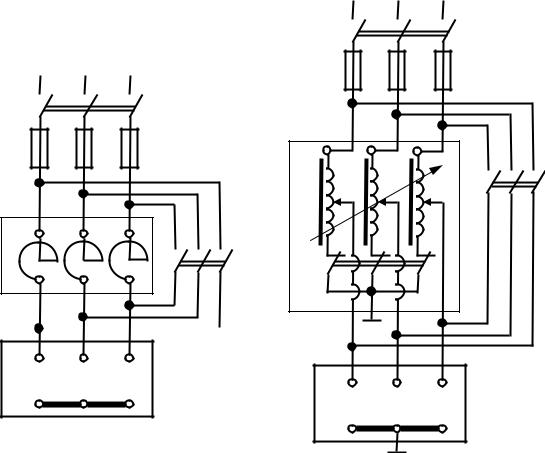
Самым простым способом пуска АД, не требующим дорогостоящего оборудования, является включение обмотки статора ключом S1 непосредственно в сеть на номинальное напряжение (рис. 7.12, а). Такой пуск называется прямым. Пусковой ток I1П при прямом пуске крат-
170
ковременно может составлять (5 – 7)I1Н, что создаёт большие тепловые нагрузки на обмотки. Также большой пусковой ток создаёт большое падение напряжения в питающей сети, что неблагоприятно влияет на дру-
гих потребителей, питающихся от той же сети. Однако все коротко- |
|||||||||||||||||||||||
замкнутые двигатели мощностью до 38 – 50 кВт допускают прямой |
|||||||||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
пуск (при достаточном сечении жил токоподводящего кабеля). |
|
||||||||||||||||||||||
|
|
|
3 ~ |
|
|
|
|
а |
|
|
|
3 ~ |
|
|
|
|
|
б |
|
||||
|
|
|
|
|
|
|
|
S1 |
|
|
|
|
|
|
|
|
S1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
U1 |
V1 |
W1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
U1 |
V1 |
W1 |
|
|
|
|
|||||||||||
|
иW2 U2 V2 |
|
|
|
|
|
Y |
S2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
W2 |
U2 |
V2 |
|
|
|
||||||||||||||
|
|
|
бРис. 7.12. Схемы пуска асинхронных |
|
двигателей: |
|
|||||||||||||||||
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||
|
а – прямой пуск; – переключение соединения обмоток статора |
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
АД |
|
||||||||||
Все значения электромагнитного момента |
, согласно выра- |
||||||||||||||||||||||
жению (7.30), пропорциональныАквадрату напряжения сети U12. Это |
|||||||||||||||||||||||
делает двигатель очень чувствительным к снижению напряжения пи- |
|||||||||||||||||||||||
тания. Например, при снижении напряжения на 10% относительно |
|||||||||||||||||||||||
номинального (U'1Ф = 0,9 U1Ф) пусковой момент уменьшается на 19% |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
|||||
(М'П = 0,92∙МП = 0,81∙MП), что значительно затрудняет прямой пуск. Значительное понижение напряжения может привести к недопустимому увеличению длительности пуска или к «застреванию» на низкой скорости вращения. Необходимым условием прямого пуска АД является преобладание вращающего момента над моментом сопротивле-
ния нагрузки (номинальным моментом): МП > МН.
Если мощность сети недостаточна для прямого пуска или пусковой момент столь значителен, что создаёт недопустимую ударную нагрузку на механизм или трансмиссию, то применяют различные способы пуска при пониженном напряжении. Однако здесь следует иметь в виду, что MП ~ U12. Поэтому этот способ пуска возможен в том случае, если двигатель пускается на холостом ходу или при ма-
171
лом моменте нагрузки. Существует несколько способов понижения подводимого к двигателю напряжения.
Для АД, работающего при соединении обмоток статора треугольником, можно применить пуск переключением обмотки статора со схемы треугольник на звезду (рис. 7.12, б). В момент подключения
Сдвигателя к сети ключ S2 ставят в положение звезда, при котором обмотка статора оказывается соединённой в звезду. При этом фазное
напряжен е на статоре понижается в 
 3 раз. Во столько же раз
3 раз. Во столько же раз
уменьшается ток в фазах обмотки двигателя. После того как ротор двигателя разгон тся до установившейся частоты вращения, ключ S2 быстро переводят в положение треугольник и обмотка статора оказываются под ном нальным напряжением.
происходНедостатком этого спосо а является то, что при переключении т разрыв цепей индуктивной обмотки статора и возникают
Болеебуниверсальным является способ пуска понижением подводимого к двигателю напряжения посредством реакторов (регулируемых реактивных дросселей), включаемых в линии питающей сети
соответствующ е коммутационные перенапряжения. Однако предельная простота пусковой аппаратуры компенсирует этот недостаток, и в установках с н зковольтными двигателями малой и средней мощности
пуск с переключен ем о моток применяется достаточно широко.
(рис. 7.13, а). А
При пуске трёхфазный реакторДLR выполняет токорегулирующую функцию в цепях фаз статора, деля фазное напряжение. При разомкнутом ключе S2 включают ключ S1, и фазы статора оказываются
последовательно подключенными к катушкам реактора LR. В результате снижение напряжения на фазе статора происходит за счёт падения напряжения на активно-индуктивном сопротивленииИреактора ZLR. После разгона ротора двигателя замыкают ключ S2, шунтирующий реактор, и двигатель подключается на полное номинальное напряжение U1Н. Пусковые реакторы обычно имеют ферромагнитный сердечник, а их обмотка рассчитывается на кратковременный режим работы. Это позволяет снизить вес и стоимость реактора.
Напряжение питания АД во время пуска можно понизить также с помощью трёхфазного автотрансформатора (рис. 7.13, б). Здесь после замыкания ключа S1 статор оказывается подключенным к вторичной обмотке понижающего автотрансформатора AT, напряжение которой понижено в k раз. После достижения определённой скорости вращения ключ S2 размыкается, и обмотка статора оказывается под-
172
ключенной к сети через часть обмотки автотрансформатора, который |
||||||||
в этом режиме работает как реактор. В конце пуска ключ S3 замыка- |
||||||||
ется, шунтирующий автотрансформатор и двигатель подключаются |
||||||||
на полное номинальное напряжение U1Н. |
|
|
||||||
|
|
|
|
|
|
3 ~ |
|
|
|
|
|
а |
|
б |
|
S1 |
|
|
3 ~ |
|
|
|
||||
С |
S1 |
|
|
|
|
|||
|
|
|
|
|
||||
и |
|
АТ |
|
|
||||
|
|
|
S3 |
|||||
|
|
|
|
|||||
LR |
|
|
|
|
|
|
|
|
|
|
|
|
S2 |
S2 |
|
|
|
|
б |
|
|
|||||
U1 |
V1 |
W1 |
|
|
|
|
|
|
W2 |
U2 |
V2 |
|
|
U1 |
V1 |
W1 |
|
А |
||||||||
|
|
|
||||||
|
|
|
|
|
W2 |
U2 |
V2 |
|
|
|
Рис. 7.13. Схемы пуска асинхронных двигателей: |
||||||
|
а – реакторный пуск; б – автотрансформаторный пуск |
|||||||
|
|
|
|
Д |
||||
Таким образом, автотрансформаторный пуск проходит в три сту- |
||||||||
пени: на первой ступени к каждой фазе статора двигателя подводится |
||||||||
напряжение U1 = (0,50 – 0,60)U1Н, на второй – U1 = (0,70 – 0,80)U1Н и, |
||||||||
наконец, на третьей ступени – номинальное напряжение U1Н. |
||||||||
|
|
|
|
|
|
И |
||
Как и предыдущие способы пуска при пониженном напряжении, |
||||||||
автотрансформаторный способ пуска сопровождается уменьшением |
||||||||
пускового момента, так как MП ~ U12. С точки зрения уменьшения |
||||||||
пускового тока автотрансформаторный способ пуска лучше реактор- |
||||||||
ного, так как при реакторном пуске пусковой ток в линии питающей |
||||||||
сети уменьшается в (U1/U1Н) |
раз, |
а при автотрансформаторном – в |
||||||
|
|
|
|
173 |
|
|
||
(U1/U1Н)2 раз. Некоторая сложность пусковой операции и повышенная |
|||||||
стоимость пусковой аппаратуры несколько ограничивают применение |
|||||||
этого способа пуска асинхронных двигателей. |
|
|
|||||
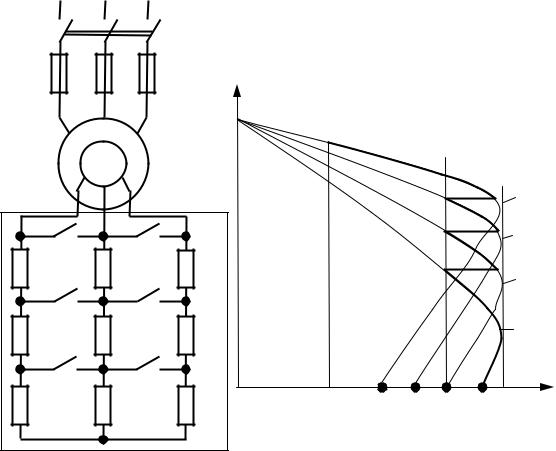
Пуск двигателей с фазным ротором производится с помощью |
|||||||
пускового |
реостата |
ПР, |
включенного |
в цепь |
обмотки |
ротора |
|
(рис. 7.14, а). Пусковые реостаты имеют отдельные секции (ступени), |
|||||||
число которых обычно не превышает трёх. Секции представляют со- |
|||||||
бой проволочные или литые чугунные элементы. Сопротивления сту- |
|||||||
пеней реостата выб рают таким образом, |
чтобы ток ротора оставался |
||||||
прибл з тельно не зменным, а среднее значение пускового момента |
|||||||
опт мальным для заданных условий пуска. |
|
|
|||||
С |
|
|
|
|
|
|
|
|
3 ~ |
|
|
|
|
|
|
S1 |
|
|
|
|
|
|
|
|
|
а |
|
|
б |
|
|
и |
|
|
|
||||
|
|
|
n2 |
|
|
|
|
|
|
|
n1 |
|
|
|
|
|
б |
|
|
|
|||
|
|
А |
без Rд |
||||
S2 |
S2 |
Rд1 |
|||||
|
|
||||||
Rд1 |
Rд1 |
|
|
||||
|
Rд1 |
|
|
Rд1 + Rд2 |
|||
|
|
|
|
|
|
||
S3 |
S3 |
|
|
|
|
Rд1 + Rд2 + |
|
Rд2 |
Rд2 |
|
Rд2 |
|
|
|
+ Rд3 |
S4 |
S4 |
|
|
Д |
|||
Rд3 |
Rд3 |
|
Rд3 |
Мн |
Мп Мп1 Мп2 Мп3 Мкр |
М |
|
|
|
|
ПР |
|
И |
||
|
|
|
|
|
|||
Рис. 7.14. Схемы пуска асинхронного двигателя с фазным ротором: |
|||||||
|
а – принципиальная схема; б – графики n2 = f(M) |
|
|||||
Пуск АД начинается при полностью включенном сопротивлении реостата R = Rд1 + Rд2 + Rд3, т.е. при разомкнутых парных контактах ключей S2 – S4. Далее по мере разгона поочерёдно вручную или авто-
174
матически замыкаются ключи S4, S3 и S2, шунтируя соответствующие секции реостата, в этот момент двигатель переходит на новую ветвь характеристики n2 = f(M) (рис. 7.14, б).
Бурное развитие электроники в последние три десятилетия привело к повсеместному распространению методов и устройств управления, известных ранее в основном теоретически. К ним относятся и так называемые устройства плавного пуска («Soft Start»). Они представляют собой импульсные тиристорные регуляторы переменного напряжения, с помощью которых напряжение можно плавно увеличивать или уменьшать, если требуется плавная остановка двигателя, с требуемой
скоростью, нач ная от любого наперёд заданного значения. |
||||
С |
|
|
|
|
7.8. Регул рован е частоты вращения трёхфазных асинхронных |
||||
|
двигателей |
|
|
|
Возможность |
|
скорости вращения |
АД является |
|
регулирования |
|
|
|
|
важнейш м |
ем современных технологических процессов. Это |
|||
связано со сн жен ем энергопотребления и с повышением качества |
||||
продукции, которого часто невозможно достичь в процессах с нерегу- |
||||
лируемыми параметрами движения (положением, скоростью вращения, |
||||
требован |
в сочетании с современной |
|||
угловым и/или линейным ускорением). |
||||
аппаратурой управления удовлетворяют большинству требований, |
||||
предъявляемых не только к приводам высокотехнологичного оборудо- |
||||
вания, но и к простым установкам, в которых достаточно сформировать |
||||
|
А |
|
||
один-два режима с постоянной скоростью вращения. |
|
|||
Рассмотренные выше характеристики и свойства |
позволяют |
|||
сделать заключение, что частоту вращения можно регулировать сле- |
||||
дующими способами [7, 11, 12]: |
|
|
|
|
• изменением тока ротораАДза счёт добавочных сопротивлений; |
||||
|
|
|
И |
|
• изменением питающего напряжения статора;
• изменением числа пар полюсов статора;
• изменением частоты питающего напряжения.
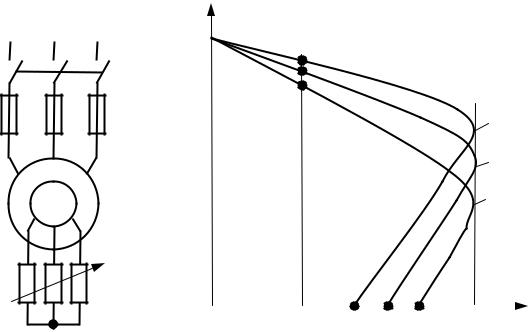
Введение добавочных сопротивлений в цепь фазного ротора. Этот метод может применяться только для АД с фазным ротором. Увеличение добавочных сопротивлений Rд, включенных в цепи фазных обмоток ротора (рис. 7.15, а), приводит к увеличению критического скольжения при сохранении максимального момента, развиваемого двигателем. В результате частота вращения двигателя уменьшается. КПД с увеличением сопротивления уменьшается из-за увеличения
175
мощности скольжения. В качестве добавочных сопротивлений при- |
||||||
меняется трёхфазный реостат, который может выполнять роль пуско- |
||||||
вого реостата (см. подр. 7.2 и 7.7). |
|
|
|
|||
На рис. 7.15, б показаны механические характеристики, соответ- |
||||||
ствующие нескольким значениям добавочного сопротивления Rд. |
||||||
Этот способ имеет недостатки: |
|
|
|
|||
1) значительные электрические потери мощности в добавочных |
||||||
сопротивлениях; |
|
|
|
|
|
|
2) с введен ем добавочных сопротивлений уменьшается жёст- |
||||||
кость механ |
ческой характеристики; |
|
|
|
||
3) процесс регул рования осуществляется только в сторону |
||||||
С |
|
от номинального значения. |
|
|||
уменьшен я частоты вр |
|
|||||
3 ~ |
а |
n2 |
|
б |
|
|
|
n1 |
n2н |
|
|
|
|
|
S1 |
|
|
|
||
|
|
|
|
|
|
|
ащения |
|
|
|
|
||
б |
|
R2 + Rд min |
||||
|
R2 |
+ Rд средн |
||||
|
|
А |
||||
|
|
R2 + Rд max |
||||
Rд |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Мн |
Мп1 Мп2 Мп3 |
Мкр |
М |
|
|
|
Д |
|||
Рис. 7.15. Регулирование частоты вращения двигателя введением |
||||||
|
в цепь ротора добавочных сопротивлений: |
|
|
|||
|
а – принципиальная схема; б – графики n2 = f(M) |
|
|
|||
Изменение питающего напряжения. Обычно этот способ реализу- |
||||||
|
|
|
|
И |
||
ется с помощью импульсных тиристорных регуляторов напряжения |
||||||
РН (рис. 7.16, а), реакторов с подмагничиванием постоянным током или |
||||||
трёхфазного автотрансформатора. В связи с тем, что обмотки статора |
||||||
АД общепромышленного назначения не предназначены для сверхно- |
||||||
минальных токов, регулировать питающее напряжение можно только в |
||||||
сторону понижения. При уменьшении напряжения уменьшается момент |
||||||
176
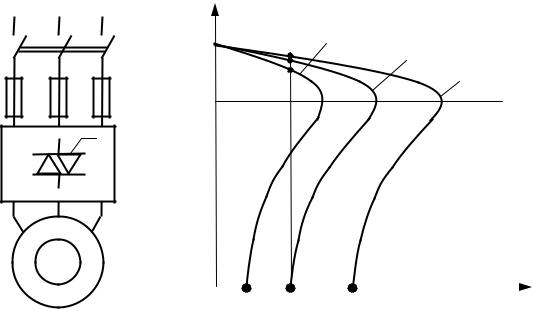
двигателя, так как MП ~ U12, но сохраняется значение критического скольжения SКР. В случае постоянного момента нагрузки на валу двигателя MC частота вращения при этом будет также уменьшаться.
Очевидно, что регулирование возможно в пределах скольжений 0 < S < SКР и для получения сколько-нибудь существенного диапазона Снеобходимо использовать короткозамкнутые двигатели с повышенным сопротивлением ротора или двигатели с фазным ротором и дополнительным сопротивлением в его цепи. Это приводит к существенному увеличен ю мощности скольжения и, следовательно, потерь энергии в обмотках ротора статора. Следует заметить, что с уменьшением напряжен я быстро сн жается перегрузочная способность двигателя и жёсткость механ ческой характеристики, что ограничивает возмож-
ность спользован я этого спосо а регулирования.
|
б |
|
|
|
3 ~ |
|
б |
|
а |
|
|
|
n2 |
<< U1Н |
|
и n2н U1 |
|
||
|
S1 |
|
U1 < U1Н |
|
А |
U1 = U1Н |
|
|
n2кр |
|
|
РН |
Д |
||
|
|||
1)уменьшение перегрузочной способностиИдвигателя при снижении напряжения вплоть до возможного «опрокидывания»;
2)сильно ограниченный диапазон регулирования 0 < S < SКР;
3)уменьшение жёсткости механической характеристики;
4)значительные тепловые потери в роторе вследствие больших значений скольжения S и ЭДС Е2S.
177
Всё это делает способ регулирования понижением напряжения малоэффективным при длительном режиме работы, но для кратковременного снижения скорости машин малой мощности он может применяться.
Изменение числа пар полюсов статора. Этот способ является са-
мым простым и эффективным способом получения нескольких фиксированных значений скорости вращения и обычно применяется для многоскоростных двигателей специального назначения с короткозамкну-
тым ротором. Частота вращения магнитного поля АД обратно пропор- |
|
циональна ч слу пар полюсов p, поэтому, изменяя их, можно дискретно |
|
регулировать частоту вращения. Обмотка ротора двигателя должна |
|
С |
|
быть т па «бел чьей клетки», так как в этом случае число полюсов её |
|
магнитного поля автоматически изменяется при изменении числа полю- |
|
сов обмотки статора. |
|
На более распространённым способом изменения числа пар по- |
|
люсов является |
схемы соединения катушечных групп об- |
зменение |
|
мотки статора, которое осуществляется соответствующей коммутаци- |
|
онной аппаратурой, которая существенно усложняется, если с помо- |
|
щью одной |
реализуются больше двух скоростей вращения. |
обмотки Начала и концы катушечныхАгрупп фаз обмотки выводятся на клемм-
ную коробку двигателя.
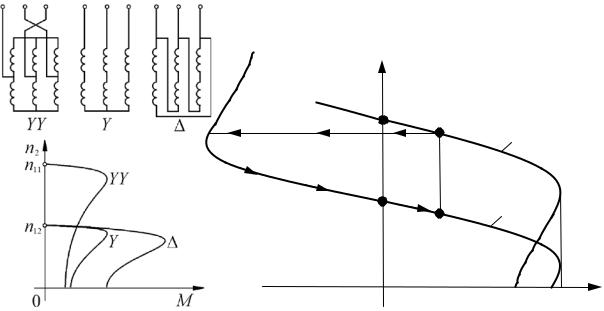
Каждая фаза о мотки с переключением числа пар полюсов в отношении 2:1 состоит из двух одинаковыхДчастей – полуобмоток (рис. 7.17, а). Если обе полуобмотки обтекаются токами в одном направлении, то формируется поле с числом полюсов, вдвое бóльшим, чем если токи протекают по полуобмоткам в противоположных направлениях. Поэтому при включении полуобмоток последовательно согласно (Y) синхронная частота становится вдвое меньшеИ, чем при включении полуобмоток встречно параллельно. Переключением последовательных согласных полуобмоток со звезды (Y) на треугольник (Δ) позволяет увеличить момент втрое при постоянной частоте вращения.
Процесс регулирования при изменении числа пар полюсов p с 1 (YY) до 2 (Y) осуществляется ступенчато без снижения жёсткости характеристики и при постоянном моменте Мкр (рис. 7.17, б).
Двигатели с переменным числом пар полюсов называются многоскоростными и используются в станкостроении, подъёмнотранспортном оборудовании, для приводов вентиляторов, насосов и т.д. Промышленностью выпускаются двух-, трёх- и более скоростные АД, рассчитанные на частоты 1500/1000/750/… об/мин.
178
а |
б |
|
СY |
|
|
|
n2 |
|
|
||||||||||
|
|
|
n11 |
1 |
|
|||||||||||
|
|
YY |
|
|
Y |
|
|
|
|
|
|
p = 1 |
||||
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
n2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
n11 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
YY |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис |
n12 |
|
p = 2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
n12 |
|
|
|
|
|
|
|
|
|
|
|
2 |
М |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
способом |
|
|
|||||||||
|
|
|
|
|
|
|
Мкр |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
М |
|
|
|
||
|
|
|
. 7.17. Регул рование частоты вращения изменением числа пар полюсов: |
|||||||||||||
|
|
|
|
|
|
|
а – пр нц пиальные схемы; б – графики n2 = f(M) |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
А |
|
||||
|
|
|
Изменение частоты питающего напряжения. Наиболее совер- |
|||||||||||||
шенным |
|
|
|
|
|
|
регулирования скорости вращения АД является |
|||||||||
частотное регулирование, т.е. изменение частоты питания. В основе |
||||||||||||||||
способа лежит прямая зависимость частоты вращения магнитного поля двигателя n1 от частоты питающего напряжения f1.
ковых преобразователей частотыД(рис. 7.18), имеющих два канала – управления частотой и амплитудой выходного напряжения. Это необходимо для того, чтобы обеспечить стабилизацию магнитного потока в двигателе, т.к. он прямо пропорционален величинеИнапряжения питания и обратно пропорционален частоте. Поэтому при изменении частоты обязательно нужно пропорционально изменять также напряжение питания. Закон частотного управления, при котором соблюдается постоянное соотношение между напряжением и частотой U/f = const, является наиболее распространённым. Однако по мере уменьшения частоты уменьшается также максимальный момент двигателя. Это связано с увеличением падения напряжения на активном сопротивлении обмотки статора R1 и, как следствие, с уменьшением магнитного потока. Уменьшение момента ограничивает диапазон регулирования скорости вращения, т.к. при этом уменьшается перегрузочная способность двигателя и возникает опасность его «опрокидывания».
Частотное регулирование реализуется с помощью полупроводни-
179

С |
|
|
|
|
|
и |
|
|
|
|
|
б |
|
|
|
||
Р |
с. 7.18. Прео разователь частоты |
|
|||
|
А |
|
|||
Для исключения этого явления нужно изменять напряжение не- |
|||||
сколько в иной пропорции так, чтобы компенсировать падение на- |
|||||
пряжения R1I1. Это называется IR-компенсацией. Использование ре- |
|||||
жима IR-компенсации увеличивает |
максимальный |
момент на |
|||
15 – 20% и сохраняет его неизменным, обеспечивая значительное |
|||||
расширение диапазона регулирования частоты вращения. |
|||||
n2 |
|
|
|
И |
|
n1н |
n2н |
|
f1н |
||
|
|
|
|||
n'1 |
Д |
||||
|
n'2н |
|
f '1<f1н |
|
|
|
|
|
|
||
n''1 |
n''2н |
f ''1<f'1н |
|
|
|
|
|
|
|
||
|
Мн Мп |
|
М'п М''п Мкр |
М |
|
Рис. 7.19. Регулирование частоты вращения двигателя изменением частоты питающего напряжения
180