


7.5. Мощность и КПД трёхфазных асинхронных двигателей
Потребляемая из сети обмоткой статора трёхфазного АД активная электрическая мощность определяется как мощность трёхфазного
симметричного приёмника [7, 12]: |
|
|
|
|
|
С |
|
|
|
|
|
P1 |
= 3U1ФI1Ф cosϕ1 |
= |
3 |
U1Л I1Л cosϕ1 , |
(7.19) |
где U1Ф |
и U1Л – фазное и линейное питающие напряжения; I1Ф и I1Л – |
|||||||
фазный |
л нейный токи статора; cosφ1 – коэффициент мощности фа- |
|||||||
зы статора. |
|
|
|
|
|
|
|
|
сети |
|
|
|
|
||||
Акт вная мощность Р1 |
определяет среднюю мощность необра- |
|||||||
тимого преобразован я в двигателе электрической энергии, получае- |
||||||||
мой из трехфазной |
, в механическую, тепловую и другие виды |
|||||||
энергии. |
|
|
|
|
|
|
|
|
Преобразован е электрической энергии в механическую в асин- |
||||||||
хронном дв гателе, как |
|
в других электрических машинах, связано с |
||||||
потерями энерг , поэтому полезная механическая мощность на валу |
||||||||
двигателя Р2 всегда меньше мощности на входе Р1, потребляемой из |
||||||||
|
А |
|
||||||
сети, на величину суммарных потерь мощности ΣР. |
|
|||||||
Активнаябполезная мощность на валу двигателя [7, 12] |
||||||||
|
|
|
Р2 = Р1 – ∑Р. |
(7.20) |
||||
КПД асинхронного двигателя |
|
|
|
|
||||
|
|
P2 |
|
∑P |
|
∑P |
|
|
|
η = |
P1 |
=1 |
− P1 |
=1 − |
|
. |
(7.21) |
|
P2 + ∑P |
|||||||
КПД трёхфазных |
Д |
общепромышленного |
назначения в |
|||||
номинальном режиме составляет при мощности до 1 кВт 60 – 75%; |
||||||||
от 1 до 10 кВт 75 – 88% и при мощностиДсвыше 10 кВт 88 – 94%. |
||||||||
Суммарные потери мощности ΣР преобразуются в теплоту, что |
||||||||
в конечном итоге ведёт к нагреву машины. Потери в электрических |
|
машинах подразделяются на основные и добавочные. Основные поте- |
|
ри включают в себя магнитные, электрические и механические. |
|
Таким образом, уравнение баланса активныхИмощностей для АД |
|
имеет вид |
|
P1 = P2 + PЭ1 + PЭ2 + PМ1 + PМ2 + PМЕХ + PДОБ , |
(7.22) |
где РЭ1 и РЭ2 – электрические потери обмоток статора и ротора; РМ1 и РМ2 – магнитные потери в сердечниках статора и ротора; РМЕХ – механические потери; РДОБ – добавочные потери мощности.
163

Магнитные потери РМ1 и РМ2 в АД вызваны потерями на гистерезис и потерями на вихревые токи, происходящими в сердечнике статора и ротора при их перемагничивании. Причём потери РМ2 в сердечнике ротора очень малы и практически не учитываются (РМ2 ≈ 0).
С |
|
|
|
РМ1 ≤ 0,015Р1. |
|
|
(7.23) |
|||||
Электрические потери в асинхронном двигателе вызваны нагре- |
||||||||||||
вом обмоток статора и ротора проходящими по ним токами. Величина |
||||||||||||
этих потерь пропорциональна квадрату тока в обмотке. |
|
|||||||||||
Электр ческ |
е потери в обмотке статора |
|
|
|||||||||
потери |
|
|
2 |
|
|
|
|
|
||||
|
|
|
P |
= |
3R I |
≤ 0,075P . |
|
(7.24) |
||||
|
|
|
Э1 |
|
|
1 |
1 |
|
|
1 |
|
|
Электр ческ |
е |
|
|
в о мотке ротора |
|
|
||||||
б |
|
|
|
|||||||||
|
|
|
P |
= m R I |
2 ≤ 0,045P . |
|
(7.25) |
|||||
|
|
|
Э2 |
|
2 |
2 |
|
2 |
|
1 |
|
|
После магн тных РМ1 |
|
электрических потерь в обмотке статора |
||||||||||
РЭ1 оставшаяся часть активной мощности, называемая электромаг- |
||||||||||||
нитной мощностью, передаётся магнитным полем в обмотку ротора. |
||||||||||||
|
|
А |
|
|||||||||
|
P |
|
= P |
− P |
− P |
= m R I |
2 S . |
(7.26) |
||||
|
ЭМ |
1 |
|
Э1 |
|
|
М1 |
|
2 2 |
2 |
|
|
Механические потери РМЕХ – это потери на трение в подшипни- |
|||
ках и на вентиляцию. Величина этих потерь пропорциональна квадра- |
|||
ту частоты вращения ротора (РМЕХ ~ п22). В асинхронных двигателях с |
|||
МДС |
|
||
фазным ротором механические потери происходят еще и за счёт тре- |
|||
ния между щётками и контактными кольцами ротора. |
|
|
|
РМЕХ ≤ 0,04Р1. |
|
|
(7.27) |
Добавочные потери включают в себя все виды трудноучиты- |
|||
|
И |
||
ваемых потерь, вызванных действием высших гармоник |
, пуль- |
||
сацией магнитной индукции в зубцах и другими причинами. |
|
|
|
РДОБ ≤ 0,005Р1. |
|
|
(7.28) |
КПД двигателя с изменениями нагрузки также меняет свою величину: в режиме холостого хода КПД равен нулю, а затем с ростом нагрузки он увеличивается, достигая максимума при нагрузке 0,45 – 0,65 от номинальной Р2Н. При дальнейшем увеличении нагрузки КПД снижается незначительно, а при перегрузке (Р2 > Р2Н) он резко убывает, что объясняется интенсивным ростом потерь (РЭ1 + РЭ2 + РДОБ), величина которых пропорциональна квадрату тока статора, и уменьшением коэффициента мощности.
164

Кроме необратимого процесса расхода энергии, учитываемого величиной активной мощности Р1, в АД происходит обратимый процесс периодического изменения запаса энергии магнитного поля машины и «потребления» реактивной мощности Q1.
В режиме холостого хода энергия расходуется в основном только на покрытие небольших потерь мощности в статоре и незначительных механических потерь. Энергия, запасённая во вращающемся магнитном поле, практически не зависит от расхода энергии на со-
вершен е полезной механической работы и нагрев двигателя, т.е. ре- |
|
активная мощность не зависит от нагрузки на валу. Таким образом, в |
|
режиме холостого хода двигателя активная мощность мала, а реак- |
|
С |
|
тивная вел ка, поэтому коэффициент мощности, соответствующий |
|
холостому ходу, меет минимальное значение cosφ10 = 0,08 – 0,15. |
|
|
увел чен ем нагрузки на валу двигателя активная мощность |
растёт, |
а реакт вная остается постоянной. Следовательно, коэффици- |
ен |
увел ч вается и при номинальной нагрузке достигает |
мощности |
|
значения cosφ1н = 0,7 – 0,9 в зависимости от мощности АД. |
|
При дальнейшем увеличении нагрузки на валу увеличиваются |
|
ток ротора I2, скольжение S, индуктивное сопротивление рассеяния |
|
Х2S и, как следствиеб, реактивная мощность потока рассеяния обмотки |
|
ротора, что приводит к уменьшению cosφ1. |
|
В целях повышения коэффициента мощности АД чрезвычайно |
|
важно, чтобы двигатель работал всегда или, по крайней мере, значи- |
|
тельную часть времениАс нагрузкой, близкой к номинальной. Это можно обеспечить лишь при правильном выборе мощности двигателя для конкретных условий и режимов эксплуатации.
Зависимости КПД и коэффициента мощности от полезной мощ- |
||
|
|
И |
ности Р2 при номинальном значении и частоте питающего напряже- |
||
ния U1 являются рабочими характеристикамиАД(рис. 7.9) [7, 12]. |
||
η, cosφ1 |
η(P2) |
|
|
cosφ1(P2) |
|
cosφ10 |
|
|
|
P2Н |
P2 |
Рис. 7.9. Рабочие характеристики
асинхронного двигателя
165

7.6. Механические характеристики асинхронных двигателей
Электромагнитный момент АД создаётся взаимодействием тока в обмотке ротора с вращающимся магнитным полем. Электромагнитный момент М равен отношению электромагнитной мощности АД РЭМ к угловой скорости вращения магнитного поля статора 2πn1/60 [рад/с] [12]:
|
|
M = |
60Р |
= |
60m R I 2 |
(7.29) |
||
|
|
|
ЭМ |
|
2 2 2 . |
|||
|
|
|
2πn |
|
|
2πn S |
|
|
|
|
|
|
1 |
|
|
1 |
|
После пр веден я выражения (7.29) к величине питающего на- |
||||||||
пряжен я фазы АД U1Ф получим следующее выражение [12]: |
|
|||||||
С |
|
|
|
|
|
′ |
2 |
|
M = |
|
|
60m1R2U1Ф |
|
||||
2πn1S[(R1 + R2′ S )2 +(X1 + X2′)2 ], |
(7.30) |
|||||||
где R'2 X'2 – пр ведённые к о мотке статора активное и индуктивное |
||||||||
сопротвления фазы о мотки ротора, |
|
|
||||||
|
|
|
R2′ = R2keki ; |
(7.31) |
||||
|
|
|
X |
2′ = |
X 2keki . |
(7.32) |
||
б |
являются |
|||||||
Параметры уравнения (7.30) |
U1Ф, |
m1, n1, R1, X1, R'2 и X'2 |
||||||
постоянными, так как их значения при изменениях нагрузки машины |
||||||||
|
А |
|
||||||
остаются практически неизменными. В данном выражении момента М единственная переменная величина – скольжение S, которое для различных режимов работы асинхронной машины может принимать разные значения в диапазоне от + ∞ до –∞.
Д асинхронной машины. Однако для решения уравненияИ(7.30) необходи-
Зависимость М = f(S) называют механической характеристикой
мо произвести расчёт параметров электрической цепи обмоток статора и ротора, воспользовавшись проектно-конструкторскими каталогами
асинхронных машин, что весьма проблематично в учебном процессе. Упрощённо, используя паспортные данные АД, механическая
характеристика М = f(S) может быть рассчитана по формуле М. Клос-
са [7, 12]: |
|
|
|
|
|
|
|
|
М = |
|
2МКР |
; |
|
(7.33) |
|||
|
|
|
||||||
|
|
S |
+ |
SКР |
|
|||
|
|
|
|
|||||
|
|
SКР |
|
S |
|
|
||
SКР = SН (λ + |
|
λ2 −1) , |
(7.34) |
|||||
|
|
166 |
|
|
|
|
|
|

где МКР – максимальный (критический) момент; SН и SКР – номинальное и критическое скольжения; λ – кратность максимального момента.
Исходная формула Клосса позволяет с достаточной точностью по- |
|||||
строить механическую характеристику только в области устойчивой |
|||||
работы, т.е. в пределах скольжения от 0 до SКР. На пусковом участке |
|||||
С |
|
|
|
|
|
при скольжении SКР ≤ |
S ≤ 1 формула Клосса даёт недопустимые по- |
||||
грешности. Поэтому для расчёта и построения пускового участка харак- |
|||||
терист ки спользуется уточнённая формула Клосса-Чекунова [13]: |
|||||
М = |
|
M П2 + 0,93M КР2 − M П2 (1− S )2 |
, |
(7.35) |
|
статическ |
(1−1,3SКР )2 |
|
|||
|
|
|
|
||
где МП – пусковой момент двигателя или стартовый момент, развиваемый в момент запуска двигателя.
Для устойч вой ра оты двигателю необходимо преодолевать й момент сопротивления, приложенный к валу, и динами-
ческий момент при разгоне, а также случайные кратковременные пе- |
||||
регрузки. Поэтому важным эксплуатационным свойством АД являет- |
||||
|
А |
|
||
ся перегрузочная спосо ность по моменту. Для двигателей общепро- |
||||
мышленногобназначения коэффициент перегрузки по моменту (крат- |
||||
ность максимального момента) λ составляет 1,6 – 2,5. |
|
|||
|
|
λ = МКР , |
|
(7.36) |
|
|
Д |
|
|
|
|
М |
|
|
|
|
Н |
|
|
где МН – номинальный момент двигателя, |
|
|||
М |
Н |
= 60 1000 Р2Н = |
9550 Р2Н , |
(7.37) |
|
2πn2н |
n2н |
|
|
|
|
|
И |
|
здесь Р2Н – номинальная мощность на валу двигателя в кВт; n2н – номинальная частота вращения ротора в об/мин.
Также важным параметром работы АД является величина пускового момента MП, которая определяется кратностью пускового мо-
мента (коэффициента пуска по моменту) kп, который для АД обще-
промышленного назначения варьируется в пределах 1,0 – 2,0.
МП = kп·МН. |
(7.38) |
Задаваясь значениями скольжения S в пределах от 0 до SКР и от SКР до 1, рассчитывают и строят механическую характеристику М = f(S) (рис. 7.10), используя формулы Клосса и Клосса-Чекунова.
167

При включении двигателя в сеть безынерционное магнитное поле статора сразу же начинает вращение с синхронной частотой n1, в то же время ротор двигателя под влиянием сил инерции в начальный мо-
мент пуска остается неподвижным (n2 = 0) и скольжение S = 1. Точка 1 |
|||
с координатами S = 1; M = MП соответствует пусковому режиму дви- |
|||
С |
|
|
|
гателя, длящемуся бесконечно малый момент времени. |
|
||
М |
2 |
|
|
МКР |
|
|
|
и |
1 |
|
|
МП |
|
|
|
б |
|
|
|
МН |
3 |
|
|
4 |
|
|
|
S = 0 SН SКР |
S = 1 |
S |
|
Рис. 7.10. Механическая характеристика |
|
||
|
асинхронного двигателя М = f(S) |
|
|
|
Д |
||
Под действием электромагнитного момента начинается вращение |
|||
ротора двигателя, приАэтом скольжение уменьшается, а момент возрас- |
|||
тает в соответствии с характеристикой |
М = f(S). При критическом |
||
скольжении Sкр электромагнитный момент достигает максимального |
|||
значения МКР. Точка 2 с координатами S = SКР; M = MКР |
соответствует |
||
|
|
И |
|
критическому режиму двигателя, при достижении которого наступает предел устойчивой работы АД.
С дальнейшим нарастанием частоты вращения (уменьшением скольжения) момент М начинает убывать, пока не достигнет установившегося значения, равного сумме противодействующих моментов, приложенных к ротору. В этом случае установившееся значение момента двигателя определится на механической характеристике точкой 3 с координатами S = SН; M = MН, которые соответствует номинальному режиму работы двигателя.
Точка 4 с координатами S = 0; M = 0 соответствует режиму идеального холостого хода, когда отсутствуют какие-либо моменты сопротивления на валу двигателя. АД самостоятельно не может дос-
168
тичь данного режима из-за механических сопротивлений на валу, так как электромагнитный момент M → 0 при S → 0; Е2S → 0 и I2 → 0.
Однако если приложить внешнее воздействие к валу двигателя и вращать его с синхронной частотой n2 = n1, то можно ввести АД в ид е- альный холостой ход. Тогда обмотки ротора не будут пересекать силовых линий магнитного поля, и ЭДС, ток ротора, а также электромагнитный момент M станут равны нулю. В этом случае ток идеального
холостого хода в обмотке статора I1 будет равен току намагничивания |
|||||
I0, который определяется магнитным потоком машины. В серийных |
|||||
машинах при ном нальном магнитном потоке ток холостого хода I0 |
|||||
составляет обычно 30 – 40% от номинального тока статора I1Н. |
|||||
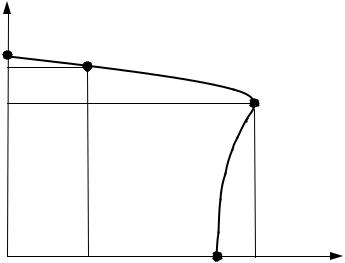
СДругую механ ческую характеристику n2 = f(M) (рис. 7.11), бо- |
|||||
лее наглядно ллюстрирующую эксплуатационные |
свойства АД, |
||||
можно получ ть |
з характеристики М = f(S), рассчитав при тех же |
||||
значе ях скольжен я S частоту n2 по формуле (7.1): |
|
||||
|
|
n2 = n1(1 – S). |
|
(7.39) |
|
ни |
|
|
|
||
n2 |
|
|
|
|
|
n2 = n1 |
4 |
3 |
|
|
|
бn2н |
|
|
|||
n2кр |
|
|
|
2 |
|
|
|
А |
|
||
|
|
|
1 |
|
|
n2 = 0 |
|
МН |
ДМП МКР М |
||
Рис. 7.11. Механическая характеристика |
|
||||
|
асинхронного двигателя n2 |
= f(M) |
|
||
|
|
|
|
И |
|
Устойчивая работа АД возможна при скольжениях меньше критического (0 < S < SКР), т.е. на участке 2 – 4 механической характеристики.
Прямолинейный участок механической характеристики n2 = f(M) в области устойчивой работы называется рабочим участком. Важнейшим параметром этого участка, от которого зависят эксплуатационные свойства двигателя, является жёсткость. Она определяется как отношение приращения вращающего момента к приращению скорости вращения M/ n2 или как производная dM/dn2.
169