Увеличение механической нагрузки на валу ДПТ сопровождается снижением частоты вращения якоря n. Это, в свою очередь, прямо
пропорционально влияет, согласно формуле (9.8), на ЭДС якоря ЕЯ. При уменьшении ЭДС якоря ток якоря IЯ возрастает, стремясь компенсировать величиной падения напряжения RЯIЯ снижение ЕЯ и тем Ссамым уравновесить приложенное к якорю постоянное напряжение
UЯ, согласно формуле (9.13). Это явление называют саморегулирова-
нием потребляемой мощности ДПТ.
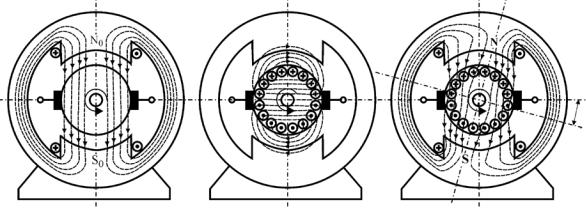
9.5. Реакция якоря
практически отсутствует, поэтому в машине действует лишь МДС
обмотки |
возбужден я FВ. Магнитное поле машины в этом случае |
Наибольшее |
|
симметр |
чно относ тельно оси главных полюсов (рис. 9.7, а) [7, 12]. |
|
же маш ну нагрузить, то в обмотке якоря появится ток, ко- |
ЕслиПри работе МПТ в режиме холостого хода ток в обмотке якоря
торый создаст в магн тной системе машины МДС якоря FЯ и непод-
вижное в пространстве магнитное поле, ось которого совпадает с осью |
|
щёток. |
А |
значение МДС якоря – на оси щёток, а по оси п о- |
|
люсов эта МДС равна нулю. Если щётки установлены на геометрической нейтрали, то поле якоря направлено поперёк оси главных полюсов, в этом случае оно называется полем поперечной реакции якоря
|
|
|
|
|
Д |
|
|||||||||||
(рис. 9.7, б). Положение полюсов поля реакции зависит от направления |
|||||||||||||||||
протекания тока, т.е. от режима работы машины. |
|
|
|
|
|
|
|
||||||||||
Таким образом, в нагруженной машине постоянного тока дейст- |
|||||||||||||||||
вуют две МДС: возбуждения FВ и якоря FЯ. |
И |
||||||||||||||||
|
|
|
а |
|
|
б |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S0 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
S |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
NЯ |
SЯ |
NЯ |
SЯ |
α |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
N0 |
|
|
|
|
|
|
N |
|
||||||||
Рис. 9.7. Схемы магнитных полей МПТ:
а– симметричное поле индуктора; б – поле поперечной реакции якоря;
в– результирующее магнитное поле машины
229
В межполюсном пространстве магнитная индукция резко ослабляется. Объясняется это увеличением магнитного сопротивления потоку якоря в межполюсном пространстве. МДС обмотки якоря на пару полюсов пропорциональна числу активных проводников в обмотке
якоря N и величине тока якоря IЯ: |
|
|
|
||
С |
FЯ |
= |
I Я N |
. |
(9.14) |
|
|
||||
|
|
|
4ap |
|
|
Под реакц ей якоря в машинах постоянного тока понимают воз-
действ е магн тного поля, возбуждаемого током якоря, на поле главных полюсов, т.е. его смещение. Так как на краях главных полюсов
режиме по бнаправлен ю вращения якоря, а в двигательном – в проти-
поле реакц |
меет противоположное основному полю направление, |
то поперечная реакц я якоря вызывает ослабление поля под одним |
|
краем полюса |
ус лен е его под другим. В результате ось результи- |
рующего магн тного поля машины поворачивается в генераторном |
|
воположном направлен и (рис. 9.7, в). Угол поворота результирующего магн тного поля машины относительно оси геометрической нейтрали α называетсяАуглом смещения физической нейтрали.
Смещение магнитного поля главных полюсов вызывает целый ряд отрицательных эффектов. В генераторном режиме работы машины это уменьшает ЭДС и соответственно выходное напряжение. В двигательном режиме часть проводниковДпараллельной ветви оказывается под другим полюсом и создаёт тормозной момент. В машинах малой мощности в номинальном режиме, а также в других машинах при работе с ослабленным полем возбуждения под воздействием реакции якоря возможно изменение направления магнитного потока под одним краем полюса («опрокидывание» потокаИ). ля исключения этого явления в мощных машинах зазор на краях полюсных наконечников делают больше, чем в центре полюса. Также неравномерность распределения индукции в воздушном зазоре машины, вызванная влиянием магнитного поля реакции якоря, приводит к увеличению напряжения между коллекторными пластинами.
Эффективным средством борьбы с искажением магнитного поля в зазоре машины является применение компенсационной обмотки. Она размещается в пазах дополнительных полюсных наконечников и включается последовательно в цепь обмотки якоря так, чтобы направление тока в её витках было противоположным направлению тока в витках обмотки якоря.
230
Последовательное включение обмотки в цепь якоря обеспечивает автоматическую компенсацию при всех нагрузках машины, т.к. через обе обмотки протекает одинаковый ток и МДС обеих обмоток из-
меняется пропорционально. При наличии компенсационной обмотки |
|||||||||||||||||
величина воздушного зазора машины может быть минимальной и ог- |
|||||||||||||||||
С |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
раничивается только механическими и технологическими условиями. |
|||||||||||||||||
Компенсационная обмотка обычно применяется в мощных и |
|||||||||||||||||
быстроходных машинах, работающих при значительных кратковре- |
|||||||||||||||||
менных перегрузках. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
зведением |
|
|
|
|
|
|
|
|
|
|
|
||||||
9.6. Мощность и КПД машин постоянного тока |
|
||||||||||||||||
КПД электр ческой МПТ представляет собой отношение отда- |
|||||||||||||||||
ваемой (полезной) мощност Р2 |
к подводимой (потребляемой) Р1. |
||||||||||||||||
б |
|
|
|
|
|
|
|||||||||||
Электр ческая мощность для МПТ является активной и в общем слу- |
|||||||||||||||||
чае определяется про |
|
|
|
|
|
|
величин подводимого напряжения U |
||||||||||
и потребляемого тока I [7, 12]: |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
P =UI |
, |
|
|
|
|
|
(9.15) |
|||||
А60 |
|
|
|
||||||||||||||
а механическая мощность на валу машины в общем случае определя- |
|||||||||||||||||
ется произведением величин вращающего момента на валу M и угло- |
|||||||||||||||||
вой скорости вращения вала машины ω: |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
Д |
|
|||||||||
|
|
P = Mω = |
M 2πn |
. |
|
|
|
(9.16) |
|||||||||
Полезная механическая мощность на валу ПТ Р2 |
всегда мень- |
||||||||||||||||
ше потребляемой электрической мощности Р1. В ГПТ электрическая |
|||||||||||||||||
мощность на выходе обмотки якоря машины Р2 |
меньше механической |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
И |
||||
мощности, затрачиваемой на вращение якоря Р1, и мощности возбуж- |
|||||||||||||||||
дения машины РВ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разница мощностей на выходе и входе МПТ оценивается сум- |
|||||||||||||||||
марными потерями мощности ΣР. |
|
|
|
|
|
|
|
|
|
||||||||
КПД двигателя постоянного тока |
|
|
|
|
|
|
|||||||||||
ηД |
= |
P2 |
= |
M Д |
ω |
=1− |
|
∑P |
. |
|
|
(9.17) |
|||||
|
P1 |
|
|
UI |
|
|
|
UI |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
КПД генератора постоянного тока |
|
|
|
|
|
|
|||||||||||
ηГ = |
P2 |
= |
|
U Я I Я |
|
|
=1 − |
|
∑P |
. |
|
(9.18) |
|||||
P1 |
|
M |
Гω+ PВ |
UI + ∑P |
|
||||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
231 |
|
|
|
|
|
|
|
|
||
Обычно КПД машин постоянного тока составляет 0,75 – 0,90
для машин мощностью от 1 до 100 кВт и 0,90 – 0,97 для машин мощ- |
||||
ностью свыше 100 кВт. Намного меньше КПД машин постоянного |
||||
тока малой мощности. Например, для машин мощностью от 5 до |
||||
50 Вт η = 0,15 – 0,50. Указанные значения КПД соответствуют номи- |
||||
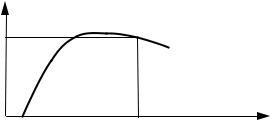
нальной нагрузке машины. Зависимость КПД МПТ от нагрузки вы- |
||||
С |
|
f(P2), форма которого характерна для электри- |
||
ражается графиком η = |
||||
ческих машин (рис. 9.8). |
|
|
||
|
η |
|
|
|
и |
|
|
||
|
ηн |
|
|
|
Такимобразом, суммарные потери мощности ΣР в МПТ |
||||
|
0 |
|
P2Н |
P2 |
|
Р с. 9.8. Ра очая характеристика МПТ |
|||
В МПТ, как в других электрических машинах, имеют место магнитные, электр ческие, механические потери (составляющие
где РМ – магнитные потериАв сердечнике якоря машины; РМЕХ – механические потери; РВ – электрические потери в цепи возбуждения машины; РЯ – электрические потери в цепи якоря машины; Р – добавочные потери мощности.
группу основных потерь) и до авочные потери.
∑P = PМ + PМЕХ + PВ + PЯ + P ОБ , |
(9.19) |
Магнитные потери РМ происходятДОБтолько в сердечнике якоря, так как только этот элемент магнитопровода машины постоянного тока подвергается перемагничиванию. Величина магнитных потерь, состоящих из потерь от гистерезиса и потерь от вихревых токов, зависит от частоты перемагничивания f = рп/60, значений магнитной индукции в зубцах и спинке якоря, толщины листов электротехнической стали, её
магнитных свойств и качества изоляции этих листов в пакете якоря. |
|
РМ1 ≤ 0,015Р1. |
И |
(9.20) |
|
Механические потери МПТ, кроме потерь в подшипниках якоря и вентиляционных потерь, свойственных всем вращающимся электрическим машинам, включают также потери на трение щёток о
коллектор: |
|
PМЕХ ≤ 0,04P1. |
(9.21) |
232 |
|
Механические и магнитные потери при стабильной частоте вращения (п = const) можно считать постоянными.
Электрические потери в коллекторной МПТ (РВ + РЯ) обуслов- |
||||||||||
лены нагревом обмоток и щёточного контакта. Потери в цепи возбу- |
||||||||||
ждения определяются тепловыми потерями на сопротивлении обмот- |
||||||||||
С |
|
|
|
|
|
|
|
|
|
|
ки возбуждения и реостата, включенного в цепь возбуждения: |
|
|||||||||
|
P |
=U |
В |
I |
В |
= R |
В |
I 2 |
≤ 0,015P , |
(9.22) |
|
В |
|
|
|
В |
1 |
|
|||
где UВ – напряжен е на зажимах цепи возбуждения; IВ – ток возбуждения; RВ – сопрот вление цепи возбуждения.
Электр ческ е потери в цепи якоря машины определяются по- |
|||||||||||
терями на сопрот влен и якорной обмотки RОЯ и потерями на щёточ- |
|||||||||||
ных контактах UЩIЯ: |
|
|
|
|
|
|
|
|
|
|
|
P |
= R |
Я |
I 2 |
= R |
I 2 +U |
Щ |
I |
Я |
≤ 0,07P , |
(9.23) |
|
Я |
|
Я |
|
ОЯ |
Я |
|
1 |
|
|||
где UЩ – паден |
|
|
|
|
на щёточных контактах ЩКУ. |
|
|||||
напряжения |
|
|
|
|
|
|
|
||||
Электр ческ е потери в цепи якоря и в щёточном контакте за- |
|||||||||||
висят от велбч ны тока якоря I и соответственно от нагрузки маши-
АЯ переменными.
ны, поэтому эти потери называют Самый трудно учитываемый вид потерь – добавочные. Эти п о-
тери складываются из потерь от вихревых токов в меди обмоток, потерь в уравнительных соединениях, в стали якоря из-за неравномерного распределения индукции при нагрузке, в полюсных наконечниках, обусловленных пульсацией основного потока из-за наличия зубцов якоря, и др. Добавочные потери составляют хотя и небольшую, но не поддающуюся точному учёту величину. Поэтому в машинах без
компенсационной обмотки значениеДОБдобавочных потерь Р принимают равным 1% от полезной мощности для ГПТ или 1% от потребляемой мощности для ДПТ. В машинах с компенсационной обмоткой значение добавочных потерь принимают равным 0,5% от полезной/
потребляемой мощности.
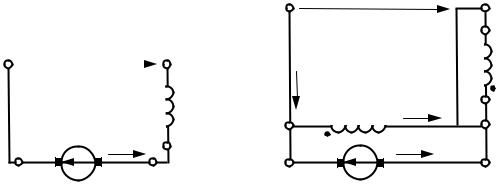
9.7. Способы возбуждения машин постоянногоИтока
В большинстве МПТ магнитное поле создаётся обмоткой возбуждения, питаемой постоянным током. Конструктивные свойства МПТ и их рабочие характеристики в значительной степени определяются способом включения обмотки возбуждения по отношению к цепи якоря, т. е. способом электромагнитного возбуждения.
233
В зависимости от способа соединения обмотки якоря с обмоткой возбуждения различают машины постоянного тока [7, 11, 12]:
• с независимым электромагнитным возбуждением;
• с параллельным электромагнитным возбуждением;
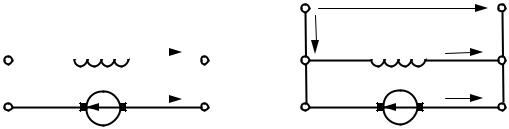
• |
с последовательным электромагнитным возбуждением; |
С |
|
• |
со смешанным электромагнитным возбуждением. |
Условные обозначения выводов обмоток МПТ в электрических схемах регламент рует ГОСТ 26772–85 ЕСКД «Машины электрические вращающ еся. Обозначение выводов и направлений вращения».
В маш нах с независимым возбуждением (рис. 9.9, а) обмотка
возбужден я F1–F2, |
меющая wн витков и сопротивление RВн, подклю- |
|||||||
чается к незав с мому |
сточнику электроэнергии, благодаря чему ток |
|||||||
ней не зав с т от напряжения на выводах якоря машины A1–A2. Для |
||||||||
а |
|
Возбужден I |
|
|
||||
этих маш |
характерна независимость главного потока от нагрузки |
|||||||
машины. |
|
|
магнитного поля с помощью постоянных маг- |
|||||
нитов(магн тоэлектр ческое воз уждение) также считается независи- |
||||||||
мыми |
распространено в машинах очень малой мощности. |
|||||||
|
|
|
|
|
|
+ |
U |
– |
|
|
|
|
|
|
|
||
F1 |
|
|
RВн wн |
IВ |
F2 |
E1 |
RВпар wпар |
IВ |
+ |
|
|
|
|
– |
|
E2 |
|
|
|
|
|
АI |
I |
|||
а– с независимым возбуждениемД; б – с параллельным возбуждением
Умашин с параллельным возбуждениемИ(рис. 9.9, б) цепь об-
мотки возбуждения E1–E2 соединяется параллельно с цепью якоря
A1–A2. В этом случае величина тока возбуждения IВ во много раз меньше величины тока якоря (0,05 ÷ 0,01)IЯ, а напряжение U между выводами цепей якоря и возбуждения одно и то же. Следовательно,
сопротивление обмотки возбуждения RВпар должно быть относительно велико. Поэтому для получения необходимой МДС Fпар = wпарIЯ параллельная обмотка возбуждения машины имеет большое число вит-
ков wпар из тонкого провода и, следовательно, значительное сопротивление RВпар. Для таких машин, работающих в системе большой мощности, характерно постоянство главного магнитного потока и его небольшая зависимость от условий нагрузки машины. ЯЯ
234