

105. Залежність дальності спостереження від різних факторів. Узагальнене рівняння радіолокації у вільному просторі.
При виявленні цілі у вільному просторі рівняння дальності матиме вигляд і визначатиметься як узагальнене рівняння дальності або узагальнене рівняння радіолокації:
 .
(I.5.7)
.
(I.5.7)
При розрахунку дальності певної мети для визначення порогового сигналу Рс min в рівнянні (5.5) потрібно знати характеристики сигналу і перешкод. Тому для імпульсної РЛС із зондуючим імпульсом тривалістю і і точкової цілі сигналу, Рс min буде рівне
![]() ,
,
де
![]() - параметр виявлення (мінімальне значення,
при якому буде прийнятий відбитий сигнал
від об'єкту), який залежить від відношення
сигнал до шуму на вході порогового
пристроїв. Тут Ес – енергія сигналу на
вході приймача, яке рівне . Рс – це
потужність сигналу, а і
– тривалість
зондуючого імпульсу (у разі точкової
цілі);
- параметр виявлення (мінімальне значення,
при якому буде прийнятий відбитий сигнал
від об'єкту), який залежить від відношення
сигнал до шуму на вході порогового
пристроїв. Тут Ес – енергія сигналу на
вході приймача, яке рівне . Рс – це
потужність сигналу, а і
– тривалість
зондуючого імпульсу (у разі точкової
цілі);
N0 – спектральна густина перешкоди;
і – тривалість зондуючого імпульсу.
При розрахунку максимальної дальності дії РЛС використовують характеристики виявлення. Тобто залежність ймовірності правильного виявлення D від q (мал. I.5.2).

Відхилення характеристик приймача від оптимальних враховують шляхом введення коефіцієнта втрат Lп>1, який показує в скільки разів (на скільки децибелів) слід збільшити потужність сигналу в реальній системі, щоб забезпечити задані параметри виявлення.
У тому випадку, коли джерелом перешкод є власні шуми приймача і шуми антени, тоді рівняння дальності прикмет вигляд:
 (I.5.8),
де
(I.5.8),
де
![]() - спектральна густина шуму;
- спектральна густина шуму;
![]() -
шумова температура, в якій: ТА
– температура антени; Т0=290К;
-
шумова температура, в якій: ТА
– температура антени; Т0=290К;
![]() - коефіцієнт шуму приймача (РшА
– потужність шумів антени, РшП
– потужність шумів приймача);
- коефіцієнт шуму приймача (РшА
– потужність шумів антени, РшП
– потужність шумів приймача);
k= 1,3810-23 Дж/К – постійна Больцмана.
В імпульсній РЛС при передачі і прийомі сигналів використовують одну антену, тому формула для дальності прикмет вигляд
 .
(I.5.9)
.
(I.5.9)
Рівняння дальності при віддзеркаленні радіохвиль від Земної поверхні.
Сигнали, відбитий земною поверхнею і іншими відбивачами, що потрапляють в межі ДНА РЛС і званими місцевими предметами, інтерферують з прямими сигналами (що пройшли по прямій), істотно впливаючи на дальність дії і інші параметри РЛС.

Рівняння дальності дії РЛС відбитих радіохвиль від земної поверхні для випадку, коли її можна вважати площиною (мал. I.5.3), що дзеркально відбиває, матиме вигляд
 (I.5.10)
(I.5.10)
де hА – висота розташовує антени;
HЦ – висота розташовує цілі.
Таким чином, дальність виявлення кораблів і ЛА, що летять низько, пов'язана з енергією зондуючого імпульсу вже коренем восьмого ступеня і для збільшення дальності дії РЛС в два рази енергію імпульсу вимагається збільшити в 256 разів.
Для наближення до РЛС на можливо малу відстань, залишаючись незнайденим, ЛА повинен летіти на мінімально можливій висоті НЦ. Саме ця умова і виконується при польоті крилатих ракет.
Гранична дальність дії. Зона видимості.
Дотепер розглядався нагляд радіолокації на дальностях, при яких земна поверхня могла вважатися плоскою. Кривизна земної поверхні обмежує дальність виявлення радіолокації.
В оптичному діапазоні хвиль дальність нагляду обмежена дальністю прямої видимості (дальністю горизонту).
![]()
Якщо
дальність спостереження радіолокації
не перевищує Rг,
то розрахунок
Rмакс
виконують по одержаних інтерференційних
формулах з урахуванням поправки на
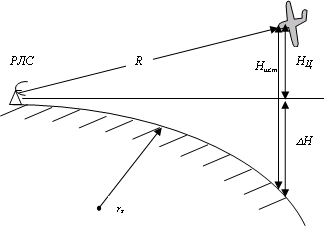
кривизну Землі. При виконанні умови
![]() облік сферичності Землі зводиться до
заміни істинної висоти розташовує цілі
Hц (рис.I.5.4) приведеною висотою
облік сферичності Землі зводиться до
заміни істинної висоти розташовує цілі
Hц (рис.I.5.4) приведеною висотою
![]() (I.5.11)
(I.5.11)
де
НЦ
– висота цілі; Ніст
– істинна
висота цілі;
![]() – параболічна висота цілі; R– відстань
до цілі; rз
– радіус землі.
– параболічна висота цілі; R– відстань
до цілі; rз
– радіус землі.
При цьому вид зони виявлення у вертикальній площині (діаграми видимості) залишається таким же, як і для «плоскої» Землі, а її поверхня має вид кривої.
З діаграми мал. I.5.4 видно, що кривизна земної поверхні зменшує дальність нагляду радіолокації низько розташованих об'єктів. Для збереження дальності необхідно збільшувати висоту розташовує антени РЛС або енергетичний потенціал станції, підвищуючи енергію зондуючого імпульсу, спрямованість антени і чутливість приймача.
В реальних умовах роботи РЛС доводиться враховувати також вплив рельєфу місцевості і наявність об'єктів, що сильно відбивають, довкола РЛС на зони її виявлення. Створювані ними додаткові віддзеркалення спотворюють діаграму видимості РЛС, знижуючи дальність виявлення і точність местоопределения цілі. Тому прагнуть по можливості розташовувати РЛС на рівному майданчику, вільному від сильних відбивачів в секторі огляду РЛС.
Окрім віддзеркалень від поверхні Землі і місцевих предметів на роботу РЛС впливають і інші фактори, пов'язані з умовами розповсюдження радіохвиль.