


27
Определение. Углом между векторами a и b называется наименьший угол ϕ ( 0 ≤ϕ ≤ π ), на который надо повернуть один из векторов относительно общей начальной точки до его совпадения со вторым.
Определение. Рассмотрим ось l , положительное направление которой совпадает с направлением единичного вектора e , расположенного на
оси. Под углом между вектором a и осью l понимают угол ϕ между векторами er и ar.
§ 6. Проекция вектора на ось. Теоремы о проекциях
→
Пусть l – некоторая ось, а AB – вектор, произвольно расположенные в пространстве. Обозначим через A1 и B1 проекции на ось l соответственно
начала A и конца B этого вектора. Предположим, что A1 на оси l имеет координату x1 , а B1 – координату x2 (рис. 1.6).
Определение. Разность x2 − x1 между координатами проекций конца
O
x1
тупой, то
A
A1
x2 < x1
|
|
|
|
и начала вектора |
→ |
на- |
|
|
B |
|
|
AB на ось l |
|||
|
|
|
|
зывается проекцией вектора |
→ |
||
|
|
|
|
AB |
|||
|
B1 |
l |
на эту ось. |
|
|
||
|
Если вектор |
→ |
|
||||
x2 |
|
AB образует с |
|||||
|
осью l острый угол, то x2 > x1 , и |
||||||
Рис. 1.6 |
|
проекция |
x2 − x1 > 0, если угол |
||||
|
|
|
→ |
|
|||
|
|
|
|
между осью l и вектором AB – |
|||
|
|
|
|
→ |
l , то проекция равна 0. |
||
и проекция отрицательна. Если AB |
|||||||
Теорема 1. Проекция вектора a на ось l равна модулю вектора a , умноженному на косинус угла ϕ между вектором и осью:
прl a = a cosϕ .
Доказательство. Проекция вектора a не изменится при любом его переносе параллельно самому себе, т.к. при этом x2 и x1 изменяются на одну и ту же
величину. Поэтому достаточно рассмотреть случай, когда начало вектора совпадает с началом O оси l .
|
ar |
B |
B |
|
|
|
B |
|
|
|
|
a |
ϕ |
|
ar |
|
|||
|
|
|
|
|
|||||
|
ϕ |
|
π −ϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
O |
|
B1 l |
B1 |
O |
l |
O |
|
l |
|
Рис. 1.7 |
Рис. 1.8 |
Рис. 1.9 |
28
Если угол ϕ между вектором и осью острый ( 0 ≤ϕ ≤π 2 ) (рис. 1.7), то
2 ) (рис. 1.7), то
|
|
|
|
|
|
прl ar = |
|
|
|
|
→ |
|
|
|
|
|
ar |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
OB1 |
= |
OB |
cosϕ = |
cos |
ϕ . |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Если же угол ϕ тупой (π 2 ≤ϕ ≤π ) (рис. 1.8), то |
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
прl ar = − |
|
B1O |
|
= − |
|
OB |
|
cos(π −ϕ) = |
|
OB |
|
cosϕ = |
|
ar |
|
cosϕ . |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
Наконец, если ϕ = π |
|
|
(рис. 1.9), то пр a = 0 и cosϕ = 0. Таким образом, |
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
||||||||
снова имеем соотношение |
|
|
|
прl a = |
|
|
a |
|
cosϕ . |
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
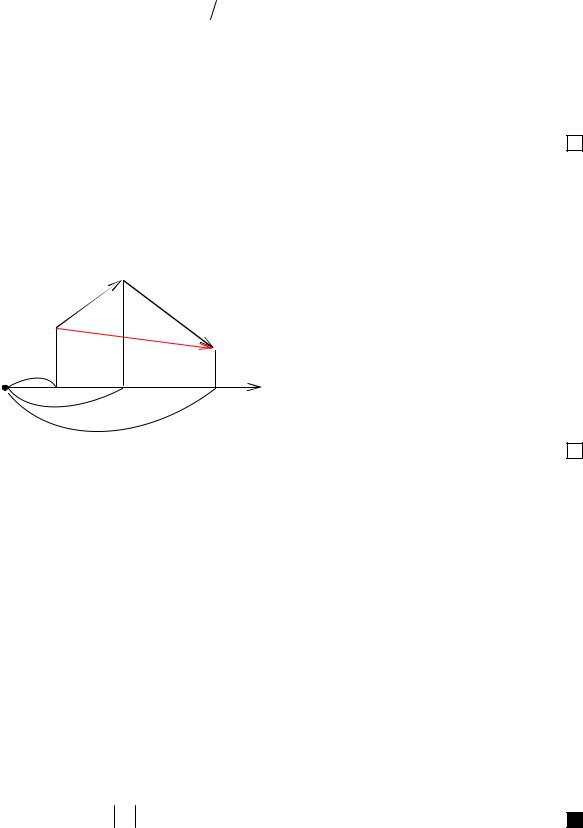
Теорема 2. Проекция суммы двух векторов на ось равна сумме проек- |
||||||||||||||||||||||||||||||||||||
ций слагаемых векторов на ось. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
→ |
→ |
|
→ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Доказательство. |
|
Пусть |
AC = AB+ BC . Обозначим через x1 , x2 |
и x3 коор- |
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
B |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
динаты проекций A1 , |
B1 |
и C1 на |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ось l точек A , B , C (рис.1.10). |
|||||||||||||||
|
|
A |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Тогда |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
→ |
|
|
|
|
|
→ |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
C |
|
|
|
|
|
|
|
прl AB = x2 |
− x1 , прl BC = x3 − x2 , |
|||||||||||||||
|
|
x1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
→ |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
прl AC = x3 |
− x1 , т.е. |
|
|
|
|
||||||||||
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
x2 |
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
→ |
|
|
|
|
→ |
|
→ |
|||||||
|
|
|
|
x3 |
|
|
|
|
|
|
|
|
прl AC |
= прl AB+ прl |
BC . |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
Рис. 1.10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Замечание. Эту теорему можно обобщить на случай любого числа слагаемых.
Теорема 3. прl (λ a)= λ прl a .
Доказательство. Прежде всего заметим, что если вектор ar составляет с осью угол ϕ и λ > 0 , то вектор λa имеет то же направление, что и вектор a , и составляет с осью также угол ϕ . Если же λ < 0 , то направление вектора λa
противоположно направлению a и вектор λa составляет с осью |
угол |
|||||||||||||||||||||||||||||||
π −ϕ =ϕ1 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
По теореме 1 имеем: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
1) |
λ > 0 ; |
прl (λar)= |
|
λar |
|
cosϕ = |
|
|
λ |
|
|
|
|
ar |
|
cosϕ = λ |
|
ar |
|
|
|
cosϕ = λ прl |
ar; |
|||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
2) |
λ < 0 ; |
прl (λar)= |
|
|
λar |
|
cosϕ1 = |
|
|
λ |
|
|
|
ar |
|
|
cosϕ1 = −λ |
|
|
|
ar |
|
cos(π −ϕ)= |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
= λ ar cosϕ = λ прl ar.
Следствие. Проекция разности двух векторов на ось равна разности проекций этих векторов на эту же ось.