

Лекция 12 мгновенный центр скоростей и ускорений
1 Мгновенный центр скоростей
Пользуясь теоремой о скоростях точек плоской фигуры, покажем, что в каждый момент времени существует точка, неизменно связанная с плоской фигурой, скорость которой в этот момент равна нулю. Эту точку называют мгновенным центром скоростей.
Допустим,
что известны скорость некоторой точки
О
плоской фигуры
![]() (рис.
12.1) и угловая
скорость фигуры
(рис.
12.1) и угловая
скорость фигуры
![]() в некоторый момент времени. Примем точку
О за полюс.
Тогда скорость любой точки фигуры будет
равна геометрической сумме скорости
полюса
в некоторый момент времени. Примем точку
О за полюс.
Тогда скорость любой точки фигуры будет
равна геометрической сумме скорости
полюса
![]() и вращательной скорости точки вокруг
этого полюса. Восставим в точке О
перпендикуляр к скорости
так, чтобы направление поворота скорости
к этому перпендикуляру совпадало с
направлением вращения фигуры.
и вращательной скорости точки вокруг
этого полюса. Восставим в точке О
перпендикуляр к скорости
так, чтобы направление поворота скорости
к этому перпендикуляру совпадало с
направлением вращения фигуры.

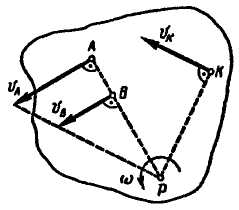
Рис. 12.1 Рис. 12.2
Вращательные скорости всех точек этого перпендикуляра вокруг полюса О направлены противоположно скорости полюса.
Найдем
такую точку Р,
вращательная скорость которой равна
по модулю скорости полюса
,
т.е.
![]() .
.
Так
как направления этих скоростей
противоположны, то
![]() Скорость
точки Р
Скорость
точки Р
![]()
Следовательно, точка Р в рассматриваемый момент времени является мгновенным центром скоростей.
Определим положение точки Р. Вычислим вращательную скорость точки Р вокруг полюса О и приравняем ее скорости полюса:
![]()
откуда
![]() (12.1)
(12.1)
Следовательно,
мгновенный центр скоростей плоской
фигуры находится на перпендикуляре
к направлению скорости полюса на
расстоянии от полюса, равном
![]() .
.
Определение скоростей точек плоской фигуры с помощью мгновенного центра скоростей. Определим скорости точек А, В и К плоской фигуры (рис. 12.2), приняв за полюс мгновенный центр скоростей Р. По формуле получим:
![]()
Но
скорость точки Р
в данный момент равна нулю, т. е.
![]() .
Тогда скорости точек определяются по
формулам
.
Тогда скорости точек определяются по
формулам
![]() (12.2)
(12.2)
т. е. скорость любой точки плоской фигуры в данный момент времени представляет собой вращательную скорость этой точки вокруг мгновенного центра скоростей; поэтому
![]() (12.3)
(12.3)
т. е. скорость любой точки плоской фигуры в каждый момент времени имеет модуль, равный произведению угловой скорости фигуры на длину отрезка, соединяющего точку с мгновенным центром скоростей, и направлена перпендикулярно этому отрезку в сторону вращения фигуры.
Найдем зависимость между скоростями точек плоской фигуры в рассматриваемый момент времени:
![]()
т. е. модули скоростей точек плоской фигуры в каждый момент времени пропорциональны расстояниям от этих точек до мгновенного центра скоростей.
Чтобы определить скорости точек плоской фигуры с помощью мгновенного центра скоростей, необходимо знать положение мгновенного центра скоростей и угловую скорость фигуры.