

3 Мгновенный центр ускорений
Мгновенный центр ускорений (МЦУ) — это точка в плоскости движения плоской фигуры, ускорение которой равно нулю.
Для
построения МЦУ
![]() при
известном ускорении точки А
плоской
фигуры
при
известном ускорении точки А
плоской
фигуры
![]() ,
которую примем за полюс, угловой
скорости
,
которую примем за полюс, угловой
скорости
![]() и
угловом ускорении
и
угловом ускорении
![]() необходимо (рис. 12.8):
необходимо (рис. 12.8):

Рис. 12.8
1.
Определить угол
![]() по формуле:
по формуле:
![]() .
.
2. Повернуть вектор ускорения полюса на угол , в направлении углового ускорения.
3. Отложить отрезок AQ :
![]() ,
,
![]() .
.
по
направлению повернутого вектора
ускорения
![]() .
.
С помощью МЦУ можно найти ускорение любой точки. Найдем величину ускорения точки В по зависимости:
![]() .
.
От отрезка BQ под углом откладываем в направлении, противоположном угловому ускорению, вектор ускорения точки В (рис. 12.8). МЦУ и МЦС в общем случае — разные точки.
Таким
образом,
модули ускорений точек плоской фигуры
в каждый момент времени пропорциональны
расстояниям от этих точек до мгновенного
центра ускорений, а векторы ускорений
составляют с отрезками, соединяющими
эти точки с мгновенным центром ускорений,
один и тот же угол
![]() .
.
Eсли мгновенный центр ускорений принять за полюс, то ускорение любой точки плоской фигуры в данный момент определится как ускорение этой точки во вращательном движении фигуры вокруг мгновенного центра ускорений (рис. 12.9).
Действительно, приняв за полюс мгновенный центр ускорений Q (рис. 12.9), получим
![]()
Так как
![]()
то
![]()
Аналогично,
![]()
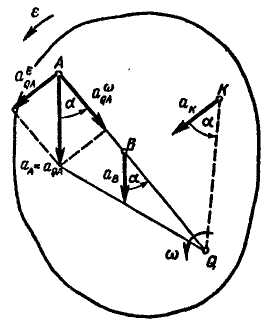
Рис. 12.9
Из этих соотношений получаем
![]() (12.4)
(12.4)
Поэтому
![]() .
.
Пример
2. Колесо
радиуса R
= 0,5 м
катится без скольжения равнозамедленно
по прямолинейному горизонтальному
рельсу. Скорость центра колеса
![]() =
0,5 м/с.
Ускорение центра
=
0,5 м/с.
Ускорение центра
![]() .
Найти ускорение точки А
с помощью МЦУ
и по теореме об ускорениях точек
плоской фигуры (рис. 12.10).
.
Найти ускорение точки А
с помощью МЦУ
и по теореме об ускорениях точек
плоской фигуры (рис. 12.10).
Решение. Находим угловые скорость и ускорение колеса:
![]() ,
,
![]() .
.
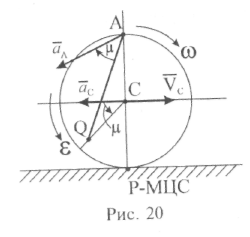
Рис. 12.10
Угловая
скорость направлена по часовой стрелке,
так как вектор скорости
![]() относительно МЦС
поворачивается по часовой стрелке.
Угловое ускорение направлено противоположно
в соответствии с направлением вектора
ускорения центра колеса
относительно МЦС
поворачивается по часовой стрелке.
Угловое ускорение направлено противоположно
в соответствии с направлением вектора
ускорения центра колеса
![]() .
.
I способ. Определим угол
![]() .
.
Повернем
![]() на угол 45° по направлению углового
ускорения. Определим расстояние от
точки С до
МЦУ
(рис. 12.10):
на угол 45° по направлению углового
ускорения. Определим расстояние от
точки С до
МЦУ
(рис. 12.10):
![]() .
.
Находим
расстояние точки А
до МЦУ
из
![]() :
:
![]()
![]() м.
м.
В
точке А
от отрезка AQ
отложим вектор ускорения точки А
в направлении,
противоположном угловому ускорению.
Величина
![]() ускорения точки А
равна:
ускорения точки А
равна:
![]() .
.
II способ. Применим формулу, приняв за полюс точку С:
![]() .
(12.5)
.
(12.5)
Находим
![]() ,
,
![]() :
:
![]() ,
,
![]() и
направлен в соответствии с угловым
ускорением (рис. 12.11):
и
направлен в соответствии с угловым
ускорением (рис. 12.11):
![]()
Вектор
![]() направлен от точки А
к полюсу С
(рис. 12.11).
направлен от точки А
к полюсу С
(рис. 12.11).

Рис. 12.11
Проецируем выражение (12.5) на выбранные оси координат:
![]() ,
,
![]() ,
,
![]() .
.
Ответ. =1,12 м/с2.
Различные случаи определения положения мгновенного центра ускорений. Все задачи на определение положения мгновенного центра ускорений плоской фигуры можно свести к трем указанным ниже основным случаям, каждому из которых, очевидно, соответствует ряд частных случаев, зависящих от характера движения плоской фигуры.
С л у ч а й I. По условию задачи известна точка плоской фигуры, ускорение которой в данный момент равно нулю. Эта точка и является мгновенным центром ускорений.
Рассмотрим,
например, качение без скольжения колеса
по прямолинейному рельсу с постоянной
скоростью центра
![]() (рис.
12.12).
(рис.
12.12).
Мгновенный центр скоростей Р находится в точке соприкасания колеса с рельсом. Поэтому
![]()
где R - радиус колеса.