

Аналитическая форма
Равнодействующая
сходящихся сил
![]() (рис. 2.11) равна геометрической сумме
этих сил:
(рис. 2.11) равна геометрической сумме
этих сил:
![]() .
.

Рис. 2.11
Проекция равнодействующей на каждую из координатных осей равна алгебраической сумме проекций всех составляющих:
![]() (2.8)
(2.8)
здесь проекции сил вычисляются по формулам:

Формулам (3) можно придать вид
![]() (2.9)
(2.9)
причем i=1,2,…,n.
Вычислив проекции равнодействующей X, У и Z, найдем модуль и направление равнодействующей по формулам (2.8) и (2.9):
В случае если силы взаимно уравновешиваются, их равнодействующая равна нулю. Так как
![]() .
.
Таким образом, для сходящихся сил в пространстве имеем следующие три уравнения равновесия:
![]() (2.10)
(2.10)
При помощи уравнений (2.10) можно решать задачи на равновесие сходящихся сил, если число неизвестных в задаче не превышает трех. Такой метод решения этих задач называется аналитическим.
Для сходящихся сил, расположенных в одной плоскости, получаем два уравнения равновесия:
![]() .
(2.11)
.
(2.11)
При помощи этих уравнений можно решить задачу на равновесие сходящихся сил на плоскости, если число неизвестных в ней равно двум.
Если в задаче на равновесие сходящихся сил число неизвестных превышает число уравнений равновесия, то ее нельзя решить методами статики твердого тела.
Теорема о трех непараллельных силах
Линии действия трех непараллельных взаимно уравновешивающихся сил, лежащих в одной плоскости, пересекаются в одной точке.
Пусть
к твердому телу в точках
![]() приложены три непараллельные взаимно
уравновешивающиеся силы
приложены три непараллельные взаимно
уравновешивающиеся силы
![]() ,
лежащие в одной плоскости (рас. 2.12).
Перенесем силы
,
лежащие в одной плоскости (рас. 2.12).
Перенесем силы
![]() и
и
![]() в точку О
пересечения линий их действия и найдем
равнодействующую
,
которая будет приложена в этой же точке.
в точку О
пересечения линий их действия и найдем
равнодействующую
,
которая будет приложена в этой же точке.

Рис. 2.12
Сила
![]() ,
будучи уравновешивающей системы сил
и
,
равна по модулю их равнодействующей
и направлена по линии ее действия в
противоположную сторону.
,
будучи уравновешивающей системы сил
и
,
равна по модулю их равнодействующей
и направлена по линии ее действия в
противоположную сторону.
Следовательно, линия действия силы , проходит через точку О, что и требовалось доказать.
Три силы, не лежащие в одной плоскости, уравновешиваться не могут.
Задача 1. Груз весом удерживается в равновесии на гладкой наклонной плоскости посредством параллельного ей троса. Определить давление груза на плоскость и силу реакции троса, если наклонная плоскость образует угол α с горизонтом. Груз считать материальной точкой (рис. 2.13).
Решение.
Графический
способ.
Рассмотрим
равновесие груза. Задаваемой силой
является вес груза
направленный по вертикали вниз. Силы
реакций связей:
![]() - реакция троса направлена вдоль троса
вверх;
- реакция наклонной плоскости направлена
по нормали вверх.
- реакция троса направлена вдоль троса
вверх;
- реакция наклонной плоскости направлена
по нормали вверх.
Строим
силовой треугольник начиная с силы
,
известной как по величине, так и по
направлению. Выбрав произвольную точку
О
вне основного рисунка, изображаем силу
.
Затем к концу силы
прикладываем силу
,
для чего проведем прямую AD,
параллельную линии действия силы
.
На этой прямой откладываем силу
.
К концу силы
![]() прикладываем начало силы
.
Так как треугольник должен быть замкнутым,
то конец силы
должен совпадать с началом О
силы
.
прикладываем начало силы
.
Так как треугольник должен быть замкнутым,
то конец силы
должен совпадать с началом О
силы
.
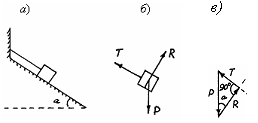
Рис. 2.13
Угол
ОАВ равен
углу α,
так как их стороны взаимно перпендикулярны,
а угол АВО
является прямым, так как линии действия
сил
и
![]() взаимно перпендикулярны. Из треугольника
ОАВ находим:
взаимно перпендикулярны. Из треугольника
ОАВ находим:
![]()
![]() .
.
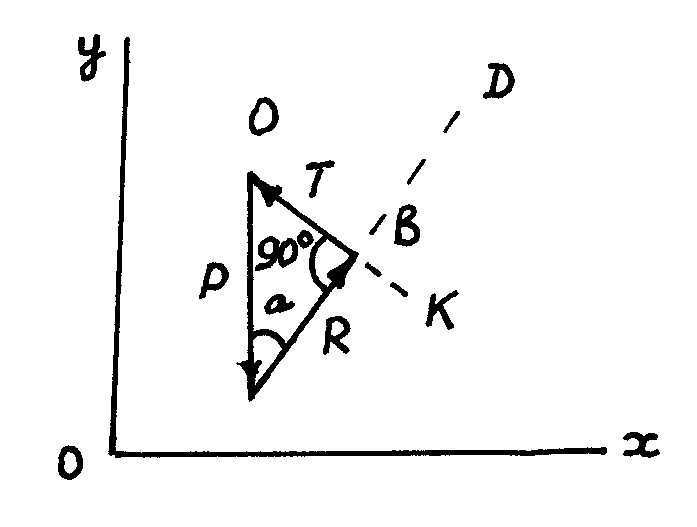
Рис. 2.14
Аналитический способ. Направим ось х по горизонтали направо и ось у по вертикали вверх (рис. 2.14). Составим уравнения равновесия груза в проекциях на оси х и у:
Задача 2. Груз M1 весом Р (рис. 1.2.1, а) подвешен на гибком нерастяжимом тросе ОМ1 отклоненном от вертикали на угол α, и удерживается в равновесии при помощи другого гибкого нерастяжимого троса М1АМ2, охватывающего идеальный блок А и несущего на свободном конце груз М2. Считая, что при равновесии участок троса М1А горизонтален, определить величину Q веса груза М2 и натяжение троса ОМ1. Размерами груза М1 и весом тросов пренебречь.
Решение. Рассмотрим равновесие груза М1. Задаваемыми силами являются вертикально направленная сила Р и горизонтально направленная сила Т2, равная по величине весу груза Q, так как идеальный блок А изменяет только направление силы.
На груз М1 наложена связь, осуществляемая тросом OM1. Освободим груз от связи. Реакция связи Т1 направлена по тросу вверх. Таким образом, груз M1 находится в равновесии под действием плоской сходящейся системы трех сил: Р, Т1 и Т2, причем T2 = Q (рис. 1.2.1, б). Решим эту задачу двумя способами: геометрическим и аналитическим.

Рис. 1.2.1
Геометрический способ. Поскольку точка М1 находится в равновесии под действием трех сил, то силовой треугольник, построенный на этих силах, должен быть замкнутым (рис. 1.2.1, в). Построение силового треугольника следует начинать с заданной силы Р. Изобразив вектор Р, проводим через его начало и конец прямые, параллельные направлениям сил Т1 и Т2. Точка пересечения этих прямых определит третью вершину силового треугольника. Ориентация всех векторов должна быть такова, чтобы силовой треугольник был замкнутым. Это дает возможность проверить правильность направления неизвестных реакций.
Из силового треугольника находим
![]()
Таким образом, вес Q груза М2, равный Т2, будет Q = Ptgα, а натяжение троса ОМ1 численно равно
![]() .
.
Аналитический способ. Выберем оси координат. Их следует выбирать так, чтобы уравнения равновесия имели простейший вид. Этого можно добиться, проводя оси перпендикулярно неизвестным силам. Проведем ось М1у перпендикулярно неизвестной силе Т2, а ось М1x - горизонтально.
Система приложенных сил Р, T1 и Т2 - плоская сходящаяся система, для которой имеют место два уравнения равновесия. В задаче две неизвестные величины: Т1 и Т2, т.е. задача статически определима.
Составим уравнения равновесия:
![]()
![]()
Отсюда находим
![]() .
.
Если воспользоваться осями М1у и М1у’, то получим
![]()
![]()
В каждое из этих уравнений входит только по одному неизвестному, что упрощает их нахождение.
Задача 3. Однородный цилиндр А весом Р и радиусом r (рис. 1.2.2, а) опирается на гладкую поверхность цилиндра В радиусом R и удерживается в равновесии при помощи нити CD длиной l, расположенной в поперечной плоскости симметрии. Определить натяжение нити и реакцию цилиндрической поверхности.
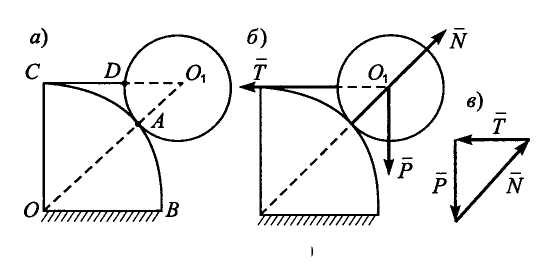
Рис. 1.2.2
Решение. Рассмотрим равновесие цилиндра А. На него действует сила Р, направленная вертикально вниз. Связями являются гладкая цилиндрическая поверхность В и нить CD. Освободимся от связей. Реакция N (рис. 1.2.2, б) цилиндрической поверхности направлена по общей нормали к цилиндрам и, следовательно, проходит через точку Ох. Реакция Т направлена по нити CD. Поскольку на цилиндр А действуют три силы, то на основании теоремы о трех силах их линии действия должны пересекаться в точке Ох. Следовательно, цилиндр А при равновесии займет такое положение, при котором нить CD будет являться продолжением его радиуса.
Построим силовой треугольник (рис. 1.2.2, в). Этот треугольник подобен ΔOO1C. Из подобия треугольников имеем
![]() или
или
![]() .
.
Отсюда находим
![]()
Задача 4. Прямоугольная пластина со сторонами АВ = а и ВС = b (рис. 1.2.3) шарнирно закреплена в вершине В, а вершиной А опирается на гладкую вертикальную стену ЕЕ. Пренебрегая весом пластины, определить реакции стены и шарнира, если к вершине С пластины подвешен груз М весом Р.


Рис. 1.2.3 Рис. 1.2.4
Решение. Рассмотрим равновесие пластины. Задаваемой силой является вес груза Р. Связями являются стена ЕЕ и шарнир В. Реакция NA (рис. 1.2.4) гладкой стены направлена по нормали к стене, реакция RB шарнира В заранее по направлению не определена. Поскольку пластина находится в равновесии под действием трех непараллельных сил Р, NA, RB, то на основании теоремы о трех силах заключаем, что линии действия этих сил должны пересекаться в одной точке К - точке пересечения линий действия сил Р и NA. Тем самым вполне определяется линия действия реакции RB. Для нахождения величин реакций следует использовать уравнения равновесия.
Решим задачу геометрическим способом. Составим силовой треугольник (рис. 1.2.5). Он должен быть замкнутым. Для построения силового треугольника отложим от произвольной точки О вектор Р, из его начала О и конца L проведем прямые, параллельные линиям действия сил RB и NA.

Рис. 1.2.5
Пусть S - точка пересечения этих прямых. Тогда
![]() .
.
Опустим из точки В перпендикуляр ВТ на прямую АК, получим
![]() ~
~![]() ,
,
следовательно,
![]() или
или
![]() .
.
Из треугольника АВТ находим
![]() ,
,
где α - угол, составленный стороной АВ с горизонтом. Отрезок ТК является проекцией отрезка ВС, следовательно,
![]() .
.
Далее,
![]() .
.
Подставляя эти величины, имеем
![]()
отсюда
![]()
Задача 5. Груз весом Р = 60 кН подвешен при помощи каната, перекинутого через небольшой блок А и идущего к лебедке D. Определить усилия в стержнях АС и ВА крана. Углы, определяющие направления стержней и каната, заданы на рис. 1.2.6.
Решение. Рассмотрим равновесие узла А крана, к которому приложены сила Р, реакции стержней АС и АВ и сила натяжения каната AD. Обозначим реакцию стержня АВ через S1 реакцию стержня АС через S2 и силу натяжения каната AD через Т.
Реакции стержней S1 и S2 направим вдоль этих стержней от узла А; сила Т направлена, очевидно, вдоль каната от А к D, так как канат растянут. Кроме того, Т=Р, так как при отсутствии трения в блоке натяжение каната, перекинутого через этот блок, во всех точках одинаково.
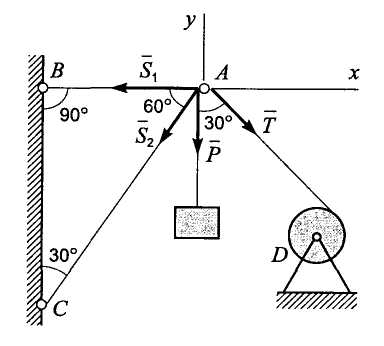
Рис. 1.2.6
Так как узел А находится в равновесии под действием сил S1, S2, P, Т, то можно составить два уравнения равновесия этой системы сходящихся сил.
Выберем оси координат, как указано на рис. 1.2.6, найдем проекцию каждой силы на эти оси и составим два уравнения равновесия, приравнивая нулю сумму проекций всех сил на каждую из координатных осей:
![]()
![]()
Из второго уравнения находим:
![]() кН,
кН,
S2 =-129,1 кН.
Теперь из первого уравнения получаем:
![]() кН.
кН.
Так как полученное значение силы S2 отрицательно, то сила S2 имеет направление, противоположное направлению, выбранному на рисунке, т.е. она направлена от С к А, и, следовательно, стержень АС сжат.
Задачу можно решить и геометрически, построив замкнутый многоугольник сил Т, Р, S1, S2 (рис. 1.2.7).

Рис. 1.2.7
Направления сил S1 и S2 найдем после того, как обойдем периметр построенного силового многоугольника, причем направление этого обхода определяется направлением известных сил Р и Т.
Измерив стороны cd и da силового многоугольника выбранной единицей масштаба, найдем величину искомых сил S1 и S2. Так как углы между силами Т, Р, S1, S2 заданы, то можно найти углы силового многоугольника, а затем вычислить и длины двух неизвестных его сторон. В самом деле, из построения силового многоугольника следует, что
![]() ,
,
а потому
![]() .
.
Если соединим точки а и с, то треугольник аbс будет равнобедренным, так как Р = Т, а потому
![]() .
.
Отсюда следует, что
![]() .
.
Применяя теперь к треугольнику adc теорему синусов, получим:
![]() ,
,
откуда
![]() ,
,
![]() .
.
Чтобы определить, будут ли стержни АВ и АС сжаты или растянуты (рис. 1.2.7), перенесем векторы S1 и S2 с силового многоугольника на стержни АВ и АС, тогда сила S2 будет направлена к узлу А, а сила S1, от узла А, а потому стержень АС сжат, а стержень АВ растянут.
Задача
6.. Жесткая
рама (рис. 1.2.8) закреплена в точке А
при помощи неподвижного цилиндрического
шарнира, а в точке В
опирается катками на гладкую наклонную
плоскость, составляющую с горизонтом
угол α
= 30°. На горизонтальном участке CD
рама находится под действием равномерно
распределенной вертикальной нагрузки
интенсивности q
= 5 кН/м.
Определить реакции опор в точках А
и В.
если CD
= 2a
= 2,1 м
и ОК
= b
=
![]() .
.

Рис. 1.2.8
Решение. Найдем сначала равнодействующую Q системы параллельных сил, приложенных к раме на участке CD, которая равна сумме слагаемых сил, т.е.
![]() кН
кН
и приложена в середине отрезка CD. Реакцию опоры В обозначим через RB. Она направлена перпендикулярно к опорной плоскости катков. Реакция RA неподвижного шарнира приложена к раме в точке А, но направление ее неизвестно. Для определения линии действия силы RA воспользуемся теоремой о трех непараллельных силах. Так как рама находится в равновесии под действием трех сил Q, RB и RA, то линии действия этих сил пересекаются в одной точке.
Продолжив
линии действия сил Q
и RB,
найдем точку Е,
через которую должна проходить сила
RA,
приложенная в точке А.
Следовательно, прямая АЕ
является линией действия силы RA.
Теперь задача может быть решена двумя
способами: геометрическим (построением
замкнутого силового треугольника) и
аналитическим (методом проекций).
Построим замкнутый треугольник abc
сил
![]() ,
,
![]() и
и
![]() ,
в котором
,
в котором
![]() ,
а стороны bc
и са
соответственно параллельны прямым BE
и АЕ.
Тогда
,
а стороны bc
и са
соответственно параллельны прямым BE
и АЕ.
Тогда
![]() и
и
![]() (рис. 1.2.8, б).
Далее определим углы в построенном
силовом треугольнике:
(рис. 1.2.8, б).
Далее определим углы в построенном
силовом треугольнике:
![]() .
Из прямоугольного треугольника КЕВ
находим:
.
Из прямоугольного треугольника КЕВ
находим:
![]() ,
,
следовательно,
ОЕ
= КЕ – КO
=
![]() ,
или ОЕ
=
,
или ОЕ
=
![]() = а.
Отсюда АО
= ОЕ
и
= а.
Отсюда АО
= ОЕ
и
![]() .
В треугольнике abc
проведем прямую се,
перпендикулярную к ab,
тогда ае
= се
=bс/2,
be
= bccos30°,
.
В треугольнике abc
проведем прямую се,
перпендикулярную к ab,
тогда ае
= се
=bс/2,
be
= bccos30°,
![]() ,
,
а потому
![]() кН,
кН,
![]() кН.
кН.
Рассмотрим теперь аналитический способ решения. Начало координат выберем в точке О, ось у направим по прямой ОЕ, а ось х — по прямой АО. Проектируя силы Q, RA и RB на оси х и у, получим следующие два уравнения равновесия:
![]()
![]()
Из первого уравнения находим
![]() .
.
Тогда из второго уравнения имеем
![]()
Отсюда
![]()
Задача 7. По направлению стропильной ноги, наклоненной к горизонту под углом α = 45о, действует сила Q=2,5 кН (рис. 1.2.9, а). Какое усилие S возникает при этом по направлению горизонтальной затяжки и какая сила N действует на стену по отвесному направлению?
Решение.
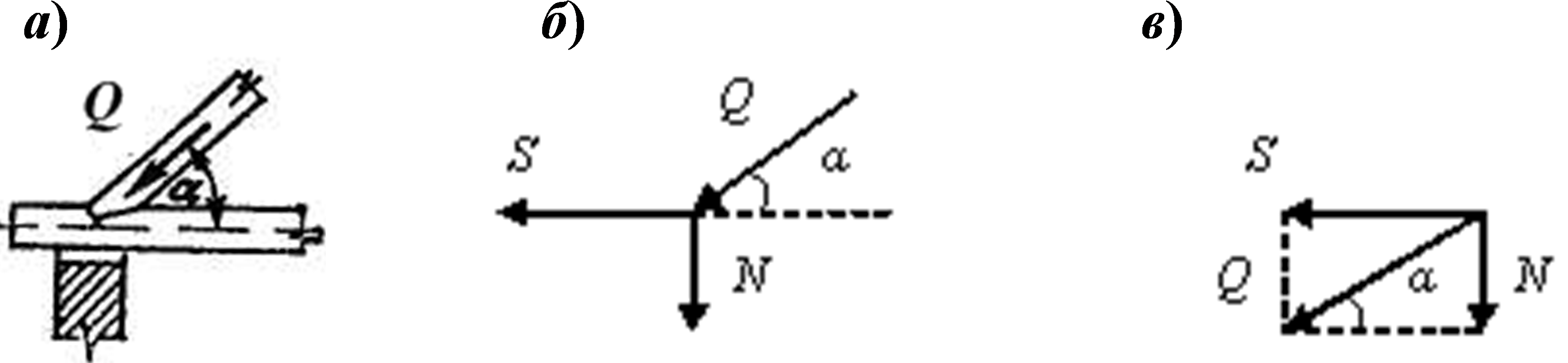
Рис. 1.2.9
1) выделим твердое тело, равновесие которого надо рассмотреть для отыскания неизвестных величин: точка, где сходятся задаваемая сила Q и силы реакций связи (рис. 1.2.9, б);
2) изображаем задаваемую силу Q (рис. 1.2.9, б);
3) применив принцип освобождаемости от связей, приложим к твердому телу соответствующие силы реакций связей S и N (рис. 1.2.9, б);
4) рассмотрим равновесие данного несвободного твердого тела, находящегося под действием задаваемой силы Q и сил реакций связей S и N; построим замкнутый силовой многоугольник (построение следует начинать с силы, известной как по величине, так и по направлению) (рис. 1.2.9, в);
5) решив силовой многоугольник, определим искомые величины.
![]() ;
;
![]() ;
;
![]() .
.
Задача 8. Стержни АС и ВС соединены между собой и с вертикальной стеной посредством шарниров. На шарнирный болт С действует вертикальная сила Р = 1000 Н. Определить реакции этих стержней на шарнирный болт С, если углы, составляемые стержнями со стеной, равны: а = 30° и β=60° (рис. 1.2.10).
Решение.


Рис. 1.2.10
![]()
![]()
![]() .
.
Задача 9. На железной дороге, проведенной в горах, участок пути в ущелье подвешен так как показано на чертеже. Предполагая подвеску АВ нагруженной силой Р = 500 кН, найти усилия в стержнях АС и AD (рис. 1.2.11).
Решение.
![]()
![]()
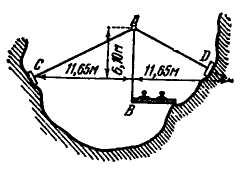

Рис. 1.2.11
Задача 10. Груз весом удерживается в равновесии на гладкой наклонной плоскости посредством параллельного ей троса. Определить давление груза на плоскость и силу реакции троса, если наклонная плоскость образует угол α с горизонтом. Груз считать материальной точкой (рис. 1.2.12).
Решение. Геометрический способ. Рассмотрим равновесие груза. Задаваемой силой является вес груза направленный по вертикали вниз. Силы реакций связей: - реакция троса направлена вдоль троса вверх; - реакция наклонной плоскости направлена по нормали вверх.
Строим силовой треугольник, начиная с силы , известной как по величине, так и по направлению. Выбрав произвольную точку О вне основного рисунка, изображаем силу . Затем к концу силы прикладываем силу , для чего проведем прямую AD, параллельную линии действия силы . На этой прямой откладываем силу . К концу силы прикладываем начало силы . Так как треугольник должен быть замкнутым, то конец силы должен совпадать с началом О силы .



Рис. 1.2.12
Нетрудно видеть, что угол ОАВ равен углу α, так как их стороны взаимно перпендикулярны, а угол АВО является прямым, так как линии действия сил и взаимно перпендикулярны. Из треугольника ОАВ находим:
.
Аналитический способ. Направим ось х по горизонтали направо и ось у по вертикали вверх. Составим уравнения равновесия груза в проекциях на оси х и у:

Задача 11. Однородная балка длиной 2а, вес которой равен Р, прикреплена к полу шарниром А и опирается другим концом в точке В на выступ вертикальной стены. Определить силы реакций выступа В и шарнира, если балка образует угол 300 с горизонтом (рис. 1.2.13, а).
Решение.
Вес балки
- задаваемая сила приложен в середине
балки в точке С
и направлен по вертикали вниз. На балку
наложены две связи: выступ В
и шарнир А.
Сила опорной реакции
![]() выступа В
направлена перпендикулярно к балке.
Направление силы реакции шарнира А
заранее неизвестно. Однако в данной
задаче можно воспользоваться теоремой
о трех непараллельных силах и указать
направление действия силы реакции
шарнира А.
Действительно, проведя линии действия
сил
и
(рис. 1.2.13, б),
определим их точку пересечения О.
Так как балка находится в равновесии
под действием трех сил
,
и
выступа В
направлена перпендикулярно к балке.
Направление силы реакции шарнира А
заранее неизвестно. Однако в данной
задаче можно воспользоваться теоремой
о трех непараллельных силах и указать
направление действия силы реакции
шарнира А.
Действительно, проведя линии действия
сил
и
(рис. 1.2.13, б),
определим их точку пересечения О.
Так как балка находится в равновесии
под действием трех сил
,
и
![]() ,
то линия действия этих сил должна
пересекаться в одной точке, т.е. линия
действия силы реакции шарнира
должна пройти через эту точку
.
Поэтому проводим линию действия силы
реакции шарнира
через ее точку приложения - шарнир А
и точку О.
,
то линия действия этих сил должна
пересекаться в одной точке, т.е. линия
действия силы реакции шарнира
должна пройти через эту точку
.
Поэтому проводим линию действия силы
реакции шарнира
через ее точку приложения - шарнир А
и точку О.

Рис. 1.2.13
Строим замкнутый силовой треугольник. Из точки D проводим силу . Через начало и конец силы проводим прямые DN и EK, соответственно параллельные линиям действия сил и (рис. 1.2.13, в).
В точке пересечения прямых DN и ЕК находим третью вершину М силового треугольника DEM. Направляем векторы сил так, чтобы в каждой из вершин силового треугольника был расположен конец одной из сил.
Нетрудно видеть, что силовой треугольник подобен ∆OCL, так как стороны их соответственно параллельны. Для определения модулей сил и вычислим длины сторон Δ OCL.
![]() ,
,
так как центр тяжести однородной балки расположен в ее середине.
Учитывая,
что
![]() ,
как углы с взаимно перпендикулярными
сторонами, из прямоугольного Δ ВОС
находим, что
,
как углы с взаимно перпендикулярными
сторонами, из прямоугольного Δ ВОС
находим, что
![]() ;
;
![]() .
.
Отрезок CL является средней линией Δ АОВ, и потому его длина равна половине основания треугольника, т.е.
![]() .
.
Из прямоугольного Δ ОАВ получим
![]() .
.
Наконец
![]() .
.
Итак, стороны Δ COL равны:
![]() .
.
На основании подобия Δ DEM и Δ COL имеем:
![]() ,
,
откуда
![]() .
.
Задача
12.
К стержню АВ
приложены непараллельные силы, лежащие
в одной плоскости: сила тяжести
![]() и реакции опор
и реакции опор
![]() и
и
![]() (рис. 1.2.14, a).
(рис. 1.2.14, a).
По
теореме о трех непараллельных силах
линии действия сил
,
,
![]() пересекаются в одной точке и,
следовательно, образуют систему
сходящихся сил. Реакция
в опоре A
направлена горизонтально и ее линия
действия пересекается с линией действия
силы
пересекаются в одной точке и,
следовательно, образуют систему
сходящихся сил. Реакция
в опоре A
направлена горизонтально и ее линия
действия пересекается с линией действия
силы
![]() в точке С
. Через эту точку должна проходить и
линия действия силы
.
Угол β
находим из условия:
в точке С
. Через эту точку должна проходить и
линия действия силы
.
Угол β
находим из условия:
При аналитическом решении проводим оси координат, указываем предполагаемые направления реакций опор и составляем уравнения равновесия в проекциях на оси координат:
![]() .
.
![]() ;
;
![]() .
.
Отсюда находим:
![]() ;
;
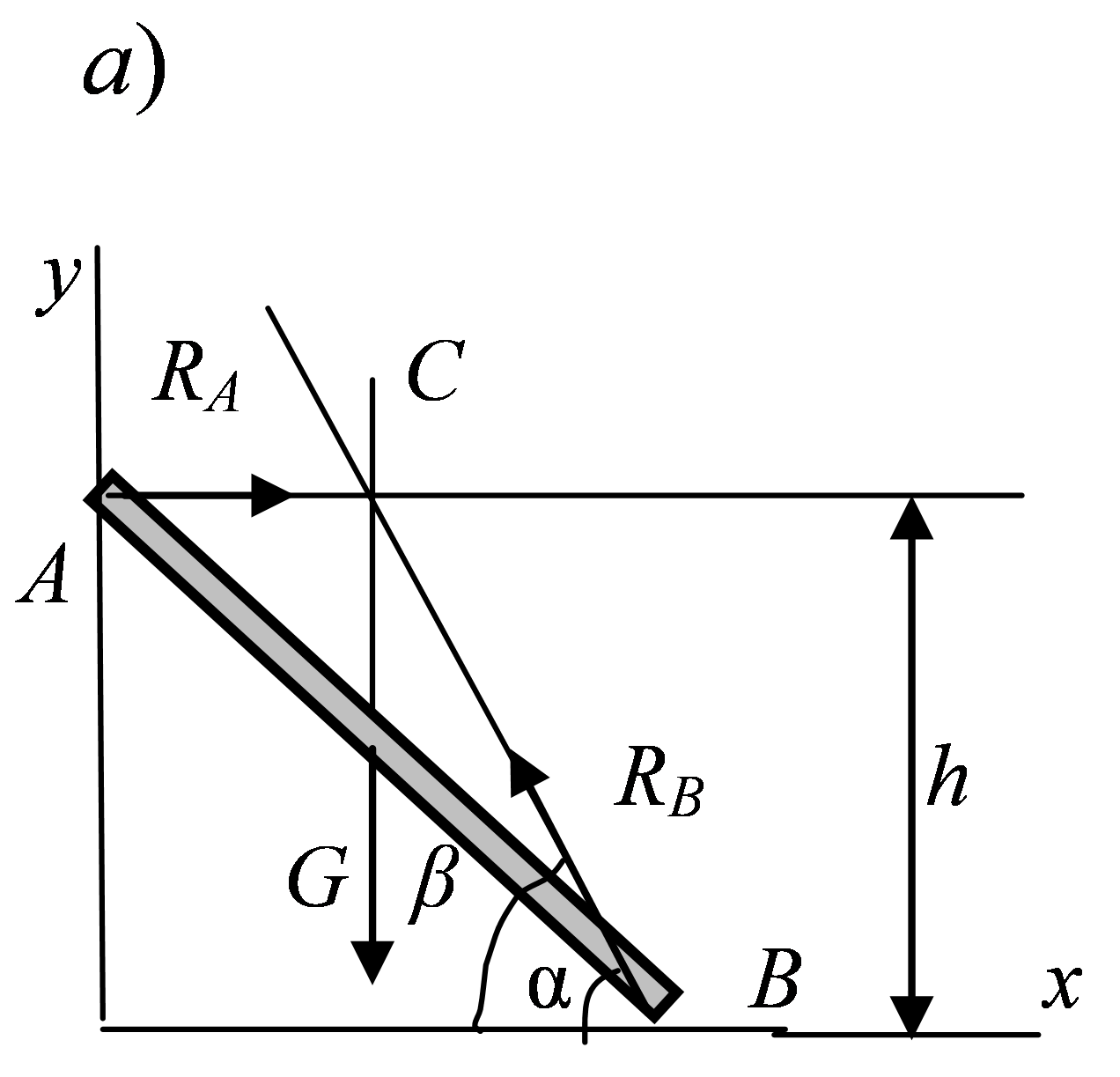

Рис. 1.2.14
При графическом решении (рис. 2.14, б) строим замкнутый треугольник векторов сил , , . Из него следует:
![]() .
.
Задача 13. Груз весом G = 2 кН (рис. 1.2.15) удерживается краном, состоящим из двух невесомых стержней в шарнирах АВ и АС, прикрепленных к вертикальной стене и составляющих с ней углы α1 = 60° и α2 = 40°. В точке А подвешен блок, через который перекинут грузовой трос, идущий к блоку в точке D и составляющий со стеной угол α3 = 60°.
Весом троса и блока, а также размерами блока можно пренебречь. Определить усилия в стержнях.
Решение. Рассмотрим находящийся в равновесии груз (рис. 1.2.16). На него действуют две силы: сила тяжести G и сила натяжения троса N1. Поскольку система сил уравновешена, можно сделать очевидный вывод: сила натяжения троса направлена внутрь троса и по модулю равна весу груза N1 = G.
Если для любого блока (рис. 1.2.17) пренебречь трением на его оси, то силы натяжения ветвей его троса одинаковы N1 = N2 (что легко видеть из уравнения моментов относительно центра блока).

Рис. 1.2.15 Рис. 1.2.16 Рис. 1.2.17
Теперь в качестве объекта равновесия можно рассмотреть мысленно вырезанный узел в точке А (или, что то же самое, блок с прилежащей к нему частью троса). На этот узел будут действовать силы натяжения ветвей троса N1 и N2 и реакции R1 и R2 стержней АВ и АС (рис. 1.2.18).

Рис. 1.2.18
Реакции опорных стержней направлены, как известно, вдоль этих стержней. Направим их внутрь стержней, считая изначально стержни растянутыми.
Составим теперь уравнения равновесия как уравнения проекций сил на оси (для системы сходящихся сил), учитывая, что силы R1, R2 и N2 составляют углы α1, α2 и α3 с осью у.
![]()
![]()
Отсюда,
учитывая, что
![]() ,
получаем
,
получаем
![]()
![]()
Решая эту систему уравнений, находим R1 = 0,611 кН, R2 = –3,52 кН. Знак «минус» у величины реакции R2 означает, что она имеет направление, противоположное принятому, то есть стержень АС не растянут, а сжат.