

3 Устойчивость при опрокидывании
Рычагом называется
твердое тело, имеющее неподвижную ось
вращения и находящееся под действием
сил, лежащих в плоскости, перпендикулярной
этой оси. Положим, что к рычагу в точках
![]() приложены задаваемые силы
приложены задаваемые силы
![]() ,
лежащие в
плоскости чертежа, а ось рычага пересекает
эту плоскость в точке О, которую
называют опорной точкой (рис. 6.10).
,
лежащие в
плоскости чертежа, а ось рычага пересекает
эту плоскость в точке О, которую
называют опорной точкой (рис. 6.10).
Реакция
![]() оси рычага, уравновешивая задаваемые
силы, лежит
в их плоскости,
но направление ее не известно.
оси рычага, уравновешивая задаваемые
силы, лежит
в их плоскости,
но направление ее не известно.
Разложим
реакцию оси рычага на две составляющие
![]() и
и
![]() и составим
три уравнения равновесия сил,
действующих на рычаг:
и составим
три уравнения равновесия сил,
действующих на рычаг:
![]() (6.8)
(6.8)
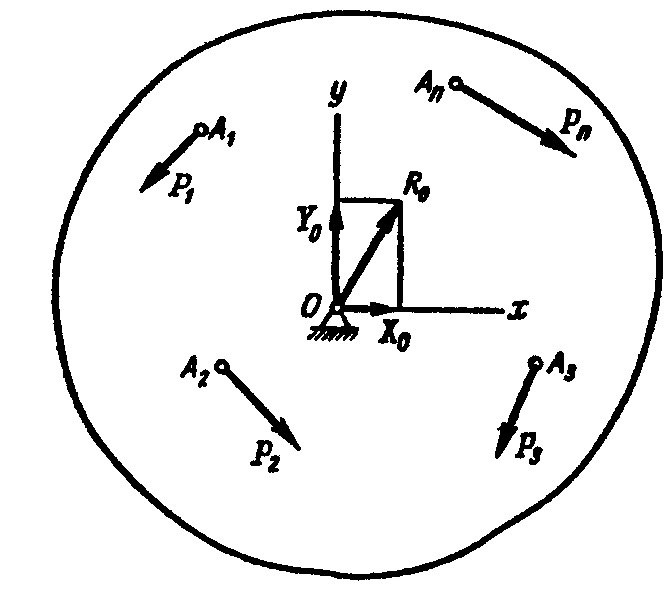
Рис. 6.10
![]() ;
(6.9)
;
(6.9)
![]() .
(6.10)
.
(6.10)
Здесь
![]() -
суммы проекций задаваемых сил, приложенных
к рычагу на оси х
и
у; Х0
и
Y0
- проекции
реакции оси рычага на оси;
-
суммы проекций задаваемых сил, приложенных
к рычагу на оси х
и
у; Х0
и
Y0
- проекции
реакции оси рычага на оси;
![]() -
сумма моментов задаваемых сил относительно
опорной точки.
-
сумма моментов задаваемых сил относительно
опорной точки.
Уравнение (6.10), не содержащее реакции оси рычага, выражает условие, которому удовлетворяют задаваемые силы, приложенные к рычагу, если он находится в покое.
Это условие формулируется так: если рычаг находится в покое, то алгебраическая сумма моментов всех задаваемых сил, приложенных к рычагу, относительно опорной точки равна нулю:
![]() .
(6.11)
.
(6.11)
Из уравнений (6.11) и (6.9) равновесия определяются модуль и направление реакции оси рычага. Из условия (6.11), которое выполняется, если рычаг находится в покое, получим условие устойчивости тел при опрокидывании.
Положим, что к прямоугольному параллелепипеду (рис. 6.11) весом на высоте d приложена горизонтальная сила , которая может не только сдвинуть тело, но и опрокинуть его при вращении вокруг ребра А. Считая, что сила недостаточно велика, чтобы сдвинуть тело, рассмотрим ее опрокидывающее действие. Обозначим а расстояние от точки А, изображающей на рисунке 6.12 ось вращения рычага, до линии действия силы , которая препятствует опрокидыванию.
Составим сумму моментов задаваемых сил и относительно опорной точки А:
![]() ,
откуда
,
откуда
![]() .
.
Назовем абсолютные значения моментов сил и относительно точки А удерживающим и опрокидывающим моментами:
![]() .
.
Тогда на границе устойчивости
![]() .
.
При устойчивом состоянии тела
![]() .
.
Устойчивость при опрокидывании в технике принято определять отношением числового значения удерживающего момента к числовому значению опрокидывающего момента:
![]() .
.
Это отношение называют коэффициентом устойчивости. Очевидно, что в случае предельной устойчивости коэффициент устойчивости k = 1, а в случае устойчивого состояния k > 1.
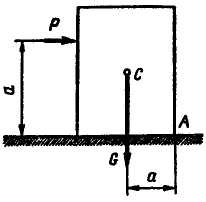
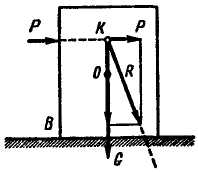
Рис. 6.11 Рис. 6.12
Определить, опрокинется ли тело под действием силы или будет находиться в устойчивом состоянии, можно и графическим путем. Для этого продолжим линии действия сил и до их пересечения в точке К, перенесем силы в эту точку и найдем их равнодействующую (рис. 6.12).
Продолжая линию действия равнодействующей силы, найдем точку ее пересечения с опорной плоскостью.
В рассмотренном примере возможны три случая:
1. Если эта точка лежит слева от ребра А, то состояние тела устойчиво.
2. Если линия действия равнодействующей пересекает ребро А, то состояние тела предельно устойчиво.
3. Если эта точка лежит справа от ребра А, то тело опрокинется.
Пример 3. Определить вес противовеса G1, обеспечивающий коэффициент устойчивости нагруженного крана при опрокидывании, равный 1,5, если вес крана G2=50 кН, вес груза G3=40 кН. Размеры указаны на рис. 6.13.
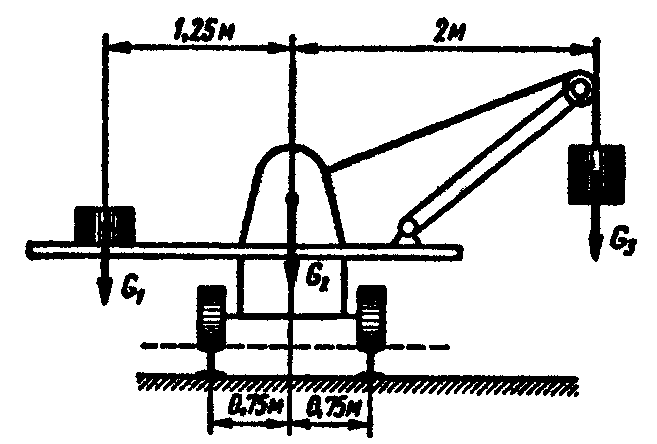
Рисунок 6.13
Решение.
Предполагаемое опрокидывание крана
под действием веса груза
![]() является
вращением вокруг оси О,
совпадающей с правым рельсом. Силами,
препятствующими опрокидыванию, являются
вес крана
является
вращением вокруг оси О,
совпадающей с правым рельсом. Силами,
препятствующими опрокидыванию, являются
вес крана
![]() и вес противовеса
и вес противовеса
![]() .
Определим опрокидывающий момент как
абсолютное значение момента силы
.
Определим опрокидывающий момент как
абсолютное значение момента силы
![]() относительно точки О:
относительно точки О:
![]() кНм.
кНм.
Определим
удерживающий момент как сумму абсолютных
значений моментов сил
и
![]() относительно точки О:
относительно точки О:
![]() кНм.
кНм.
Воспользуемся коэффициентом устойчивости тела при опрокидывании
![]() .
.
Отсюда
![]() кН.
кН.