

Теорема Вариньона о моменте равнодействующей
Момент равнодействующей системы сил относительно произвольной точки равен геометрической сумме моментов составляющих сил относительно этой точки:
![]() .
.
Момент равнодействующей системы сил относительно любой оси равен алгебраической сумме моментов составляющих сил относительно этой оси:
![]() .
.
Уравнения равновесия произвольной пространственной системы сил
Произвольная пространственная система сил приводится к главному вектору и главному моменту.
Для равновесия произвольной пространственной системы сил, приложенных к твердому телу, необходимо и достаточно, чтобы главный вектор и главный момент этой системы сил равнялись нулю.
Условия равновесия в векторной форме:
![]() .
.
Условия равновесия (уравнения равновесия) в аналитической форме:
1.![]()
2.![]()
3.![]() .
.
Задача
1. Прямоугольная
однородная плита весом
удерживается в горизонтальном
положении тросом СC’.
Определить реакции связей, если Р
= 100 Н,
F =
40 Н,
а
= 30°, β
= 60°,
![]() (рис. 4.5).
(рис. 4.5).
Решение.
Используя принцип освобождаемоемости
от связей, заменим действие связей
реакциями, приложенными к плите. В точке
А
(сферический шарнир) будут три составляющие:
![]() .
В точке В
— две составляющие:
.
В точке В
— две составляющие:
![]() .
Реакцию нити
направим по линии СС’.
Для уравновешенной произвольной
пространственной системы сил составим
шесть уравнений равновесия:
.
Реакцию нити
направим по линии СС’.
Для уравновешенной произвольной
пространственной системы сил составим
шесть уравнений равновесия:

Рис. 4. 5
1.
![]()
2.
![]()
3.
![]()
4.
![]()
5.
![]()
6.
![]()
Из (6)
 .
.
Из (5)
 .
.
Из (4)
![]() .
.
Из (1)
![]() .
.
Из (2)
![]() .
.
Из (3)
![]() .
.
Ответ.
![]()
![]() .
.
Минус
показывает, что направление
![]() противоположно направлению, показанному
на рис 4.5.
противоположно направлению, показанному
на рис 4.5.
Равновесие пространственной системы параллельных сил
Для пространственной системы параллельных сил можно составить три уравнения равновесия. Если силы параллельны оси Z, то имеем следующие уравнения равновесия:
1.
![]() .
.
2.
![]() .
.
3.
![]() .
.
Задача 2. Квадратная однородная плита весом Р находится в равновесии. Определить реакции связей, если Р = 100 Н; F = 20 H (рис. 4.6).
Решение.
Рассмотрим равновесие плиты под действием
системы параллельных сил
,
![]() и реакций связей
,
и реакций связей
,
![]() ,
,
![]() .
Составим три уравнения равновесия:
.
Составим три уравнения равновесия:
1.
![]()
2.
![]()
3.
![]()
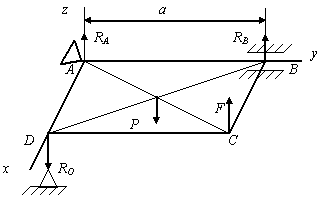
Рис. 4.6
Находим из (2)
![]() ,
,
из (3)
![]() ,
,
из (1)
![]() .
.
Ответ.
![]() .
.
Минус показывает, что реакция связей направлена противоположно направлению, показанному на рис. 4.6.
Задача 3. При повреждении одной из двух петель прямоугольной парниковой рамы ABDE ее удерживают в горизонтальном положении двумя вертикальными стержнями FJ и KL. Вес рамы G= 80 Н. Расстояния: BF=1/4 BD; ND=1/5 BD; KN =1/2 ED. Определить реакцию шарового шарнира (петли) А и усилия в стержнях FJ и KL (pиc. 5.2.1).
Решение.
Рассматриваем равновесие сил, приложенных
к раме. Прикладываем к раме в центре
тяжести С
задаваемую
силу - вес рамы
(рис. 5.2.1). Отбрасывая связи, прикладываем
к раме их реакции. Реакции сжатых стержней
![]() и
и
![]() ,
равные усилиям в стержнях, направляем
вертикально вверх. Реакция шарового
шарнира
может иметь любое направление, но при
условии, что остальные силы
,
и
,
приложенные к раме, вертикальны, реакция
тоже имеет
вертикальное направление.
,
равные усилиям в стержнях, направляем
вертикально вверх. Реакция шарового
шарнира
может иметь любое направление, но при
условии, что остальные силы
,
и
,
приложенные к раме, вертикальны, реакция
тоже имеет
вертикальное направление.
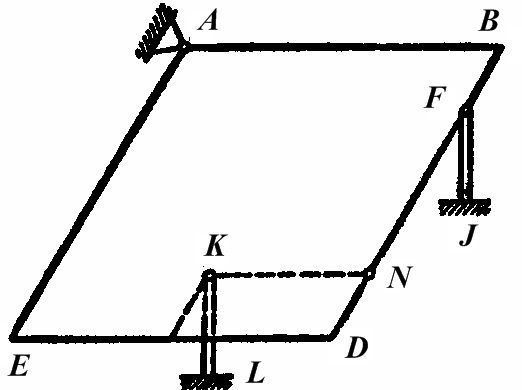
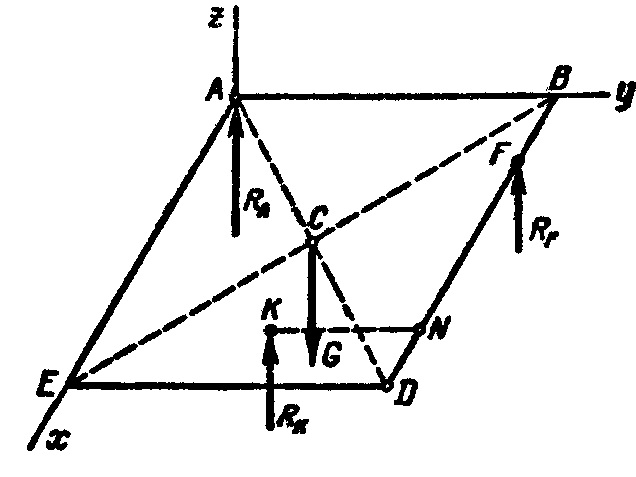
Рис. 5.2.1 Рис. 5.2.2
Для полученной системы вертикальных сил, из которых три силы не известны, составляем три уравнения равновесия параллельных сил в пространстве. Начало координат помешаем в одну из опорных точек (A), ось z направляем параллельно силам, оси х и у проводим по краям рамы.
Уравнения равновесия параллельных сил имеют следующий вид:
![]() (1)
(1)
![]() (2)
(2)
![]() (3)
(3)
В уравнение (2) подставляем BN=4/5 BD, BF=1/4 BD и, сокращая, получаем
![]() ;
(1а)
;
(1а)
![]() ;
(2а)
;
(2а)
![]() .
(3а)
.
(3а)
Подставляем значение G=180 H, решая систему двух первых уравнений и находим RK и RF:
![]() ,
,
или
![]() .
.
Вычитая из одного уравнения другое, находим:
![]() .
.
Из уравнения (3) определяем RA:
![]() .
.
Задача 4. Дано: Р=5 кН, М=6 кНм, l=0,8 м, F3=8 кН, F1=4 кН. Найти: реакции связей А, В и стержня (рис. 5.2.2).
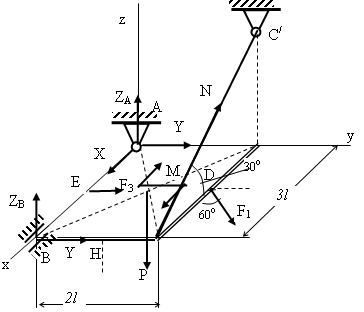
Рис. 5.2.2
Решение.
Рассмотрим равновесие плиты. На нее
действуют сила тяжести
,
силы
![]() ,
пара сил с моментом
и реакции связей А(
,
пара сил с моментом
и реакции связей А(![]() ),
В(
),
В(![]() )
и стержня
(считаем его растянутым).
)
и стержня
(считаем его растянутым).
Составляем уравнения равновесия пространственной системы сил:
![]()
![]() ,
,
![]() ;
;
![]()
![]() ,
,
![]() ;
;
![]()
![]()
![]()
![]() ,
,
![]() ;
;
![]()
![]() ,
,
![]() ;
;
![]()
![]() ,
,
![]() .
.
XA |
YA |
ZA |
YB |
ZB |
N |
кН |
|||||
2,33 |
–6,7 |
–1 |
–4,8 |
0 |
5 |
Задача 5. . Горизонтальный вал весом G = 15 Н может вращаться в цилиндрических шарнирах А и В (рис. 5.2.4). К шкиву 1 приложено нормальное давление N и касательная сила сопротивления F = 0,1N.
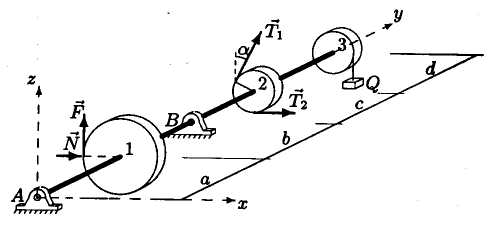
Рис. 5.2.4
На шкив 2 действуют силы натяжения ремней Тг = 30 Н, Т2 = 57 Н. Груз Q = 18 Н висит на нити, навитой на шкив 3. Определить силу давления N и реакции шарниров в условии равновесия вала. Учесть веса шкивов: Рг = 35 Н, Р2 = 10 Н, Р3 = 15 Н. Все нагрузки действуют в вертикальных плоскостях. Известны радиусы шкивов, R1= 26 см, R2 = 10 см, R3 = 11 см и расстояния между характерными точками вала: а = 22 см, b = 25 см, с = 26 см, d = 26 см. Общая длина вала L = a + b + c + d; α =30°.

Рис. 5.2.5
Решение
1. Действие цилиндрических опор А и В заменим реакциями ZA, ХА и ZB, ХВ (рис. 5.2.5). Вес вала G приложим в центре. Вес груза изобразим вектором Q.
2. Для определения силы давления составляем уравнение моментов относительно оси вала:
![]() .
.
Уравнение содержит одну неизвестную F. Линии действия остальных сил пересекают ось у и их моменты относительно оси вала равны нулю.
Из полученного уравнения находим
![]()
По условию N = F/0,1 = 27,692 Н.
3. Определяем вертикальные реакции шарнирных опор вала. Для этого составляем два уравнения моментов относительно горизонтальных осей, проходящих через шарниры А и В. Рассматриваем для удобства проекцию всех сил на плоскость zy (рис. 5.2.6). Таким образом вычисление моментов относительно осей сводим к плоской задаче вычисления моментов относительно точек А и В.
Знаки моментов сил определяем как в задачах плоской статики: момент силы, вращающей тело вокруг моментной точки против часовой стрелки считается положительным, по часовой стрелке — отрицательным. Моменты сил, перпендикулярных плоскости zy (и поэтому не изображенных на рис. 5.2.9), относительно любой ее точки равны нулю.
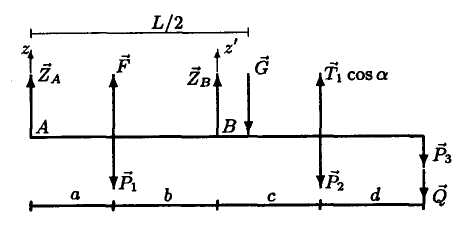
Рис. 5.2.6
Решая уравнения


находим ZA = –11,324 H, ZB = 75,574 H.
4. Проверяем правильность нахождения вертикальных реакций, составляя уравнение равновесия в проекции на ось z (рис. 5.2.6):
![]()
5. Определяем горизонтальные реакции опор вала. Для этого составляем два уравнения моментов относительно осей, совпадающих с линиями действия вертикальных реакций шарниров. Рассматриваем горизонтальную проекцию силовой схемы (рис. 5.2.7):
![]()
![]()
Решая уравнения, находим ХА = 25,100 Н, ХВ = –124,792 Н.
6. Проверяем правильность нахождения горизонтальных реакций, составляя уравнение равновесия в проекции на ось х вдоль линии действия горизонтальных реакций:
![]()

Рис. 5.2.7
Результаты расчетов в Н заносим в таблицу:
N |
XA |
ZA |
XB |
ZB |
27,692 |
25,100 |
-11,324 |
-124,792 |
75,574 |
Задача 6. Груз весом Р поднимается с помощью лебедки (рис. 5.2.8). К концу рукоятки лебедки приложена вертикальная сила Q. Длина рукоятки l. Расстояние КМ = а, СЕ =d, радиус малой шестерни равен r, радиус большой — R, радиус барабана — R1, АВ=L1. Рукоятка лебедки расположена горизонтально. Плоскость, перпендикулярная осям валов и проходящая через подшипники А и С, отстоит от плоскости зубчатых колес на расстоянии l1. CD = 2l1. Угол зацепления (угол между усилием в зубчатом зацеплении и нормалью к колесам в точке касания) принять равным 33° (рис. 5.2.9, 5.2.10).
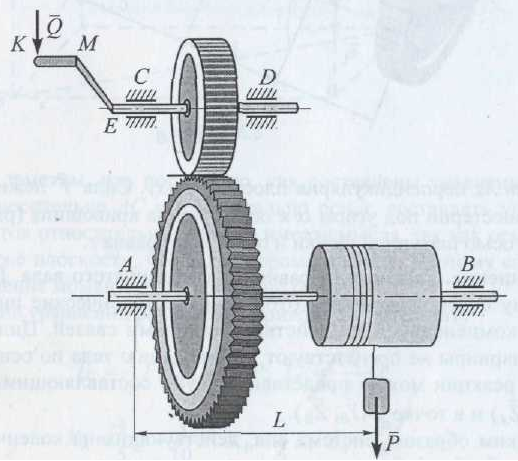
Рис. 5.2.8
Определить величину силы Q и реакции всех подшипников.
Решение. Рассмотрим равновесие вала CD (рис. 5.2.9) и вала АВ (рис. 5.2.10).

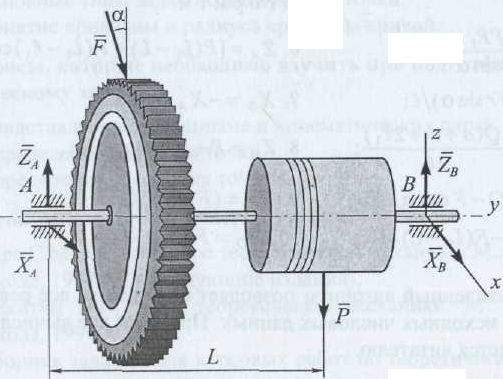
Рис. 5.2.9 Рис. 5.2.10
Уравнения равновесия вала CD:
![]()
![]()
![]()
![]()
![]()
Уравнения равновесия вала АВ:
![]()
![]()
![]()
![]()
![]()
Используя полученные уравнения равновесия, определяем неизвестные.
![]()
![]()
![]()
![]()
![]()
Задача 7. Коленчатый вал может вращаться в цилиндрических подшипниках А и В. На конце вала насажана шестерня радиусом R. В центре D шейки приложена сила Q, лежащая в плоскости перпендикулярной оси вала и направленная параллельно оси z. Определить модуль силы F, возникающей в зубчатом зацеплении, и реакции коренных подшипников в точках А и В. На рис. 5.2.11: Ау — ось вала, ось Ах перпендикулярна оси вала и параллельна общему перпендикуляру, соединяющему ось вала с осью шатунной шейки.
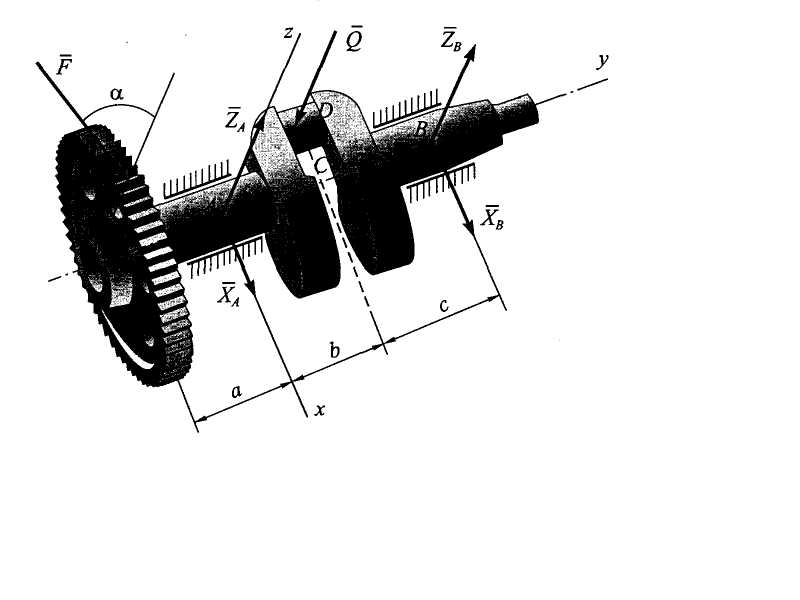
Рис. 5.2.11
Ось Az перпендикулярна плоскости Аху. Сила F лежит в плоскости шестерни под углом α к оси z. Длина кривошипа (расстояние между осью шатунной шейки и осью вала) равна r.
Решение. Рассмотрим равновесие коленчатого вала. Применив принцип освобождаемости от связей, отбросим цилиндрические шарниры А и В и заменим их действие реакциями связей. Цилиндрические шарниры не препятствуют перемещению тела по оси у, поэтому их реакции можно представить двумя составляющими в точке A(YA, ZA) и в точке B(YB, ZB).
Таким образом, система сил, действующих на коленчатый вал (YA, ZA, YB, ZB, F, Q), эквивалентна нулю. В этой системе пять неизвестных, то есть задача статически определена.
Составим уравнения равновесия.
![]()
![]()
![]()
![]()
Используя полученную систему уравнений, составляем алгоритм для определения реакций связей:
![]()
![]()