

Определение ускорения точки
При неравномерном криволинейном движении точки изменяются модуль и направление ее скорости. Ускорение точки характеризует быстроту изменения модуля и направления скорости точки.
Допустим,
что в момент времени t
точка занимает
положение М
и имеет
скорость
,
а в момент времени
![]() она занимает положение M1
и имеет скорость
она занимает положение M1
и имеет скорость
![]() (рис.
8.10, а).
(рис.
8.10, а).
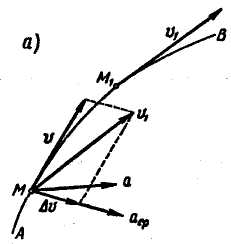

Рис. 8.10
Найдем приращение вектора скорости за промежуток времени Δt. Для этого отложим от точки М скорость и построим при этой точке параллелограмм, одной из сторон которого будет скорость , а диагональю - скорость .
Тогда
вторая сторона параллелограмма
будет приращением вектора скорости
![]() ,
так как
,
так как
![]() .
.
Разделив
приращение вектора скорости
![]() на промежуток времени Δt,
получим вектор среднего ускорения точки
за этот промежуток:
на промежуток времени Δt,
получим вектор среднего ускорения точки
за этот промежуток:
![]() .
.
Этот
вектор имеет направление
и, следовательно, направлен в cторону
вогнутости кривой. Построив годограф
скорости CD
(рис.
13,б), отложим
там же скорости v
и v1,
приращение вектора скорости
,
а также вектор среднего ускорения
![]() ,
направленный по хорде
NN1
годографа скорости. Предел, к которому
стремится вектор среднего ускорения
,
когда Δt
стремится к нулю, является вектором
ускорения точки α
в данный
момент времени
t:
,
направленный по хорде
NN1
годографа скорости. Предел, к которому
стремится вектор среднего ускорения
,
когда Δt
стремится к нулю, является вектором
ускорения точки α
в данный
момент времени
t:
![]() .
.
Учитывая,
что скорость является вектор - функцией
от времени, т. е.
![]() и что
и что
![]()
![]() .
.
Следовательно, вектор ускорения точки равен первой производной от скорости или второй производной от радиуса-вектора точки по времени.
Установим направление вектора ускорения. Вектор среднего ускорения направлен по хорде NN1 годографа скорости. Когда Δt стремятся к нулю, точка N1 стремится к точке N и секущая NN1 в пределе превращается в касательную к годографу скорости. Из этого следует, что вектор ускорения точки имеет направление касательной к годографу скорости.
Выясним расположение вектора ускорения точки по отношению к ее траектории, если траектория не является плоской кривой. Вектор находится в плоскости, проходящей через касательную к траектории точке М и прямую, параллельную касательной в точке М1 (рис. 10,а). Предельное положение этой плоскости при стремлении точки M1 к точке М называется соприкасающейся плоскостью.
Из
этого следует, что вектор
ускорения точки
![]() расположен
в соприкасающейся
плоскости и направлен в сторону вогнутости
кривой.
расположен
в соприкасающейся
плоскости и направлен в сторону вогнутости
кривой.
Если кривая плоская, то соприкасающейся плоскостью является плоскость кривой и вектор ускорения лежит в этой плоскости.
4 Скорость и ускорение точки при координатном способе задания движения Определение скорости точки
Определим модуль и направление скорости точки по уравнениям ее движения в декартовых координатах. Пусть заданы уравнения движения точки (рис. 8.11):
.
Обозначим
орты осей координат
![]() .
Проведем из начала координат О
в движущуюся точку М
радиус-вектор
.
Согласно рис.
6,
.
Проведем из начала координат О
в движущуюся точку М
радиус-вектор
.
Согласно рис.
6,
![]() или
или
![]() .
.
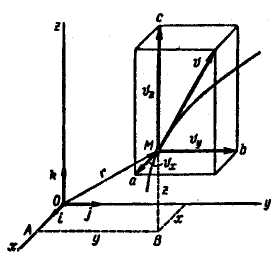
Рис. 8.11
Скорость точки равна производной от радиуса-вектора по времени. Найдем эту производную, учитывая, что орты имеют неизменные модули и направления, т. е. постоянны и могут быть вынесены за знак производной:
![]()
Построив
прямоугольный параллелепипед, ребра
которого параллельны осям координат,
а диагональ совпадает со скоростью
,
получим проекции скорости
на оси координат
![]() равные алгебраическим величинам
отрезков Мα,
Мb,
Мс.
равные алгебраическим величинам
отрезков Мα,
Мb,
Мс.
Тогда разложение скорости на компоненты по осям координат примет вид
![]() .
.
Сопоставляя обе формулы, определяющие скорость, находим:
![]() .
.
Следовательно, проекции скорости точки на неподвижные оси декартовых координат равны первым производным от соответствующих координат точки по времени.
Пользуясь принятым обозначением производных по времени, имеем:
![]() .
.
Вычислив проекции скорости на оси декартовых координат, можно определить модуль и направление скорости точки по следующим формулам:
![]() .
.
Движение точки в плоскости хОу (рис. 8.12) задается двумя уравнениями движения:
.
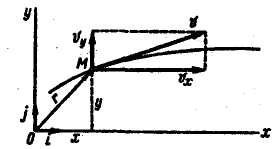
Рис. 8.12
Модуль и направление скорости точки в этом случае определяются так
![]() .
.
Прямолинейное движение точки задается одним уравнением (рис. 8.13)
![]() .
.

Рис. 8.13
В этом случае модуль скорости точки равен абсолютной величине проекции скорости на ось х:
![]() .
.
При
![]() точка движется по направлению оси х
(рис.
8.13), при
точка движется по направлению оси х
(рис.
8.13), при
![]() - противоположно
направлению оси.
- противоположно
направлению оси.