

Санкт-Петербургский Государственный Университет Сервиса и Экономики
Институт сервиса автотранспорта, коммунальной и бытовой техники
Кафедра «Техническая механика»
Кандидат военных наук, доцент
ШАБАЕВ В.Н.
ТЕОРЕТИЧЕСКАЯ МЕХАНИКА
Курс лекций по статике и кинематике
Учебное пособие
Санкт-Петербург
2011
Раздел 1 Статика
Лекция 1
ПРЕДМЕТ СТАТИКИ
Основные понятия и аксиомы статики
Приступая к изучению статики, следует определить основные понятия, встречающиеся в этом разделе.
Материальной точкой называют материальное тело, размеры которого в рассматриваемых конкретных условиях можно не учитывать. Материальная точка обладает массой и способностью взаимодействовать с другими телами. Например, автомобиль можно считать материальной точкой при изучении его движения по дороге.
Системой материальных точек (механической системой) называют такую совокупность материальных точек, в которой положение и движение каждой точки зависят от положения и движения других точек этой системы.
Абсолютно твердым телом называется тело, в котором расстояния между любыми его точками остаются неизменными. Реальные тела обычно могут изменять свою форму, при этом изменяются и расстояния между отдельными точками тел. Однако, в ряде случаев эти изменения (деформации) настолько малы, что ими можно пренебречь. Это значительно упрощает изучение действия сил на тело и условий, при которых эти силы уравновешиваются.
Важнейшим понятием в теоретической механике является понятие силы. Сила - это мера механического взаимодействия тел, определяющая интенсивность и направление этого взаимодействия.
Сила определяется тремя элементами: числовым значением (модулем), направлением и точкой приложения. Сила изображается вектором (рис. 1.1).

Рис. 1.1
Прямая, по которой направлена сила, называется линией действия силы. За единицу силы в Международной системе единиц - СИ принимается ньютон (Н).
Системой сил называют совокупность нескольких сил, действующих на данное тело. Системы сил, под действием каждой из которых твердое тело находится в одинаковом кинематическом состоянии, называются эквивалентными.
Сила, эквивалентная некоторой системе сил, называется равнодействующей.
Сила, равная по модулю равнодействующей и направленная по линии ее действия в противоположную сторону, называется уравновешивающей.
Приложенная система сил к твердому телу, находящемуся в покое, не выводит его из этого состояния, называется системой взаимно уравновешивающихся сил.
Силы, действующие на механическую систему, делятся на две группы: внешние и внутренние.
Внешними называются силы, действующие на материальные точки (тела) данной системы со стороны материальных точек (тел), не принадлежащих этой системе.
Внутренними называются силы взаимодействия между материальными точками (телами), рассматриваемой системы.
Аксиомы статики
1. Аксиома инерции. Под действием взаимно уравновешивающихся сил материальная точка (тело) находится в состоянии покоя или движется прямолинейно и равномерно. Аксиома инерции выражает установленный Галилеем закон инерции.
2. Аксиома равновесия двух сил. Две силы, приложенные к твердому телу, взаимно уравновешиваются только в том случае, если их модули равны и если они направлены по одной прямой в противоположные стороны (рис. 1.2).
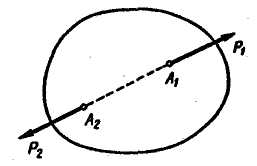
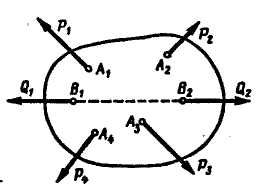
Рис. 1.2 Рис. 1.3
З. Аксиома присоединения или исключения уравновешивающихся сил. Действие системы сил на твердое тело не изменится, если к ней присоединить или из нее исключить систему взаимно уравновешивающихся сил (рис. 1.3).
Следствие. Не изменяя кинематического состояния абсолютно твердого тела, силу можно переносить вдоль линии ее действия, сохраняя неизменными ее модуль и направление.
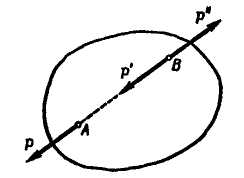
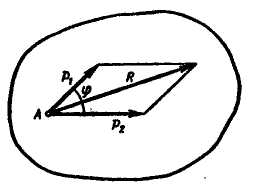
Рис. 1.4 Рис. 1.5
4. Аксиома параллелограмма сил. Равнодействующая двух пересекающихся сил приложена в точке их пересечения и изображается диагональю параллелограмма, построенного на этих силах (рис. 1.5).
Это положение выражается следующим геометрическим равенством:
![]() .
.
Модуль равнодействующей силы определяется по следующей формуле:
![]() ,
,
где
![]() -
угол между направлениями сил
-
угол между направлениями сил
![]() и
и
![]() .
.