

Естественный способ задания движения точки
Рассмотрим естественный способ задания движения точки, применяемый в случае, когда траектория точки заранее известна. Траекторией может быть как прямая, так и кривая линия (рис. 8.5).
![]()
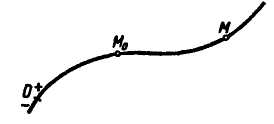
Рис. 8.5
Выберем на траектории неподвижную точку О, которую назовем началом отсчета дуговой координаты. Положение движущейся точки М на траектории будем определять дуговой координатой, т. е. расстоянием ОМ = s, отложенным по траектории от начала отсчета О.
Расстояния, отложенные в одну сторону от точки О, будем считать положительными, а в противоположную - отрицательными, т. е. установим направление отсчета дуговой координаты.
При движении точки М расстояние s от этой точки до неподвижной точки О изменяется с течением времени, т. е. дуговая координата s является функцией времени:
![]() .
(8.5)
.
(8.5)
Эта зависимость называется уравнением движения точки.
Если вид функции f(t) известен, то для каждого значения t можно найти значение s, отложить соответствующее расстояние по траектории и указать, где находится движущаяся точка М в этот момент времени.
Таким образом, движение точки определено, если известны следующие элементы: траектория точки, начало и направление отсчета дуговой координаты и уравнение движения s =f(t).
Дуговую координату точки не следует смешивать с длиной пути σ, пройденного движущейся точкой. Дуговая координата s точки М в некоторый момент времени t может быть равна пути σ, пройденному точкой за промежуток времени [0, t], только в том случае, если движение точки начинается из точки О и совершается в положительном направлении.
![]() .
.
3 Скорость и ускорение точки при векторном спосоБе задания движения точки Определение скорости точки
Скорость — это векторная величина, характеризующая быстроту и направление движения точки в данной системе отсчета.
При
векторном способе задания движения
положение движущейся точки в каждый
момент времени определяется
радиусом-вектором
,
который
является функцией времени
![]() .
Пусть в момент времени t
точка
занимает положение
М,
определяемое радиусом-вектором
,
а в момент
.
Пусть в момент времени t
точка
занимает положение
М,
определяемое радиусом-вектором
,
а в момент
![]() - положение M1,
определяемое радиусом-вектором
- положение M1,
определяемое радиусом-вектором
![]() (рис.
8.6). Из
треугольника ОММ1,
(рис.
8.6). Из
треугольника ОММ1,
![]() .
.
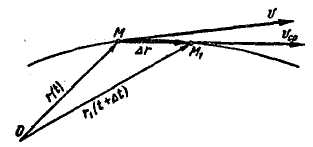
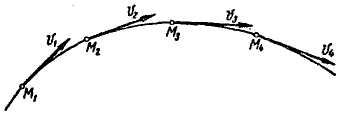
Рис. 8.6 Рис. 8.7
При перемещении точки ее радиуc-вектор получает приращение:
![]() .
.
Из
двух последних равенств следует, что
вектор перемещения точки
![]() является приращением радиуса-вектора
точки
является приращением радиуса-вектора
точки
![]() за промежуток времени
t.
за промежуток времени
t.
Отношение
вектора перемещения
![]()
![]() к промежутку времени
t,
в
течение
которого произошло это перемещение,
представляет собой вектор средней
скорости
к промежутку времени
t,
в
течение
которого произошло это перемещение,
представляет собой вектор средней
скорости
![]() воображаемого движения точки по хорде
ММ1:
воображаемого движения точки по хорде
ММ1:
![]() .
.
Направление
вектора
совпадает с направлением Δ
.
При уменьшении промежутка времени
Δt
и приближении его к нулю вектор Δ
также стремится к нулю, а вектор
![]() - к некоторому пределу. Этот предел
является вектором скорости точки в
момент
t:
- к некоторому пределу. Этот предел
является вектором скорости точки в
момент
t:
![]() .
.
Так
как Δt
- приращение
скалярного аргумента t,
а Δ
- приращение
вектора-функции
,
то предел отношения
![]() при
при
![]() является векторной производной от
по
t:
является векторной производной от
по
t:
![]()
Отсюда
![]()
Таким образом, вектор скорости точки в данный момент равен производной от радиуса-вектора точки по времени.
Вектор
![]() направлен по хорде
MM1
в сторону движения точки. Когда Δt
стремится к нулю, точка M1
стремится к точке М,
т. е. предельным положением секущей
MM1
является касательная.
направлен по хорде
MM1
в сторону движения точки. Когда Δt
стремится к нулю, точка M1
стремится к точке М,
т. е. предельным положением секущей
MM1
является касательная.
Из
этого следует, что вектор
скорости точки
![]() направлен по касательной к траектории
в сторону движения точки.
направлен по касательной к траектории
в сторону движения точки.
При движении точки по криволинейной траектории направление вектора скорости непрерывно изменяется (рис. 8.8).

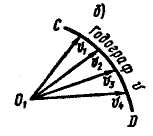
Рис. 8.8
Скорость точки при неравномерном криволинейном движении изменяется как по модулю, так и по направлению.
Отметим
ряд положений движущейся точки на
траектории M1,
M2,
M3,
М4
и покажем в этих положениях скорости
точки
![]() (рис. 8.8,а).
(рис. 8.8,а).
Выбрав в пространстве некоторую неподвижную точку О1, отложим от этой точки векторы, геометрически равные скоростям (рис. 8.8,б). Если от точки О1 отложить скорости, соответствующие всем положениям точки М на кривой АВ, и соединить концы этих векторов, то получится линия CD, являющаяся годографом скорости.
Таким образом, годограф скорости представляет собой геометрическое место концов векторов скорости движущейся точки, отложенных от одной и той же произвольной точки пространства.
Изобразим
на рис.
8.9, а
траекторию точки АВ
и ее скорость
![]() в
произвольный момент времени t,
а на рис.
8.9, б
- годограф
скорости CD
этой точки.
в
произвольный момент времени t,
а на рис.
8.9, б
- годограф
скорости CD
этой точки.
Проведем через точку О1 оси координат X, Y, Z, параллельные основным осям х,y,z. Тогда радиусом-вектором любой точки N годографа скорости CD будет скорость , а координаты точек годографа X, У, Z будут равны проекциям скорости на оси координат:
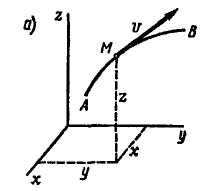
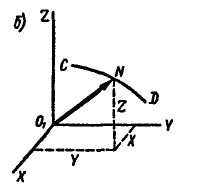
Рис. 8.9
![]() .
.
Эти уравнения являются параметрическими уравнениями годографа скорости.