

Лекция 11 плоское движение твердого тела
Уравнения плоского движения твердого тела
Плоским называется такое движением твердого тела, при котором все его точки движутся в плоскостях, параллельных некоторой неподвижной плоскости.
Из определения следует, что траектории всех точек тела находятся в параллельных плоскостях, которые в свою очередь, параллельны одной и той же неподвижной плоскости. Примером такого движения может служить движение книги по плоскости стола. Все точки, лежащие на страницах книги, движутся в параллельных плоскостях, которые в свою очередь параллельны плоскости стола. Другой пример - колесо, которое катится по прямолинейному рельсу. Траектории всех точек колеса лежат в параллельных плоскостях.
Плоское движение твердого тела имеет большое значение в технике, так как звенья многих механизмов и машин совершают движения этого вида. Рассмотрим в качестве примера кривошипно-шатунный механизм (рис. 11.1).
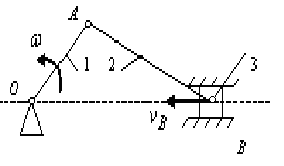
Рис. 11.1
Звено 1 – кривошип совершает вращательное движение; звено 2 – шатун совершает плоское движение; звено 3 – ползун совершает поступательное движение.
При изучении плоского движения, как и любого другого, необходимо рассмотреть способы задания этого движения, а также приемы вычисления скоростей и ускорений точек тела.
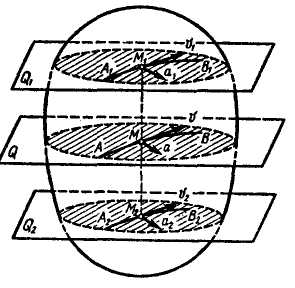
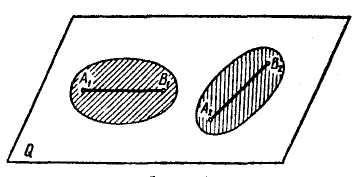
Рис. 11.2 Рис. 11.3
Рассмотрим движение точек тела, расположенных на одном перпендикуляре к неподвижной плоскости Q. Точка М1 движется в плоскости Q,1 , а точка М2 — в плоскости Q2; обе плоскости параллельны неподвижной плоскости Q (рис. 11.2).
При
движении тела отрезок
M1M2
остается перпендикулярным плоскости
Q,
т. е. остается параллельным своему
начальному положению. Это значит, что
все точки этого перпендикуляра, аналогично
точкам тела, движущегося поступательно,
описывают тождественные и параллельные
между собой траектории и в каждый момент
времени имеют геометрически равные
скорости и ускорения, т. е. траектории
A1B1
, А2В2,
АВ
точек тела M1,
M2,
М
тождественны и параллельны, их скорости
![]() и ускорения
и ускорения
![]() также равны.
также равны.
Основываясь на этом свойстве плоского движения твердого тела, устанавливаем, что движение каждой точки плоской фигуры в неподвижной плоскости Q определяет собой движение всех точек твердого тела, расположенных на перпендикуляре к плоскости Q, восставленном в этой точке. Это позволяет свести изучение плоского движения твердого тела к изучению движения плоской фигуры в ее плоскости.
Так как положение плоской фигуры на плоскости вполне определяется положением двух ее точек или положением отрезка, соединяющего две точки этой фигуры (рис. 11.3), тo движение плоской фигуры в ее плоскости можно изучать как движение прямолинейного отрезка в этой плоскости.
Предположим, что плоская фигура переместилась на плоскости из положения I в положение II (рис. 11.4). Отметим два положения отрезка АВ, принадлежащего фигуре. Покажем, что перемещение фигуры можно осуществить совокупностью двух перемещений: поступательного перемещения и поворота.
1-й вариант. Переместим фигуру поступательно из положения АВ в положение A1В’, т. е. так, чтобы точка А переместилась в новое положение А1, а точка В описала траекторию, тождественную траектории точки А. Затем повернем фигуру вокруг точки А1 на угол φ1 так, чтобы точка В' совпала с точкой В1.
2-й вариант. Переместим фигуру поступательно из положения АВ положение А'В1, a затем повернем ее вокруг точки В1 на угол φ2 так, чтобы точка А' совпала с точкой А1.
Вариантов перемещений может быть столько, сколько точек плоской фигуры, т.е. бесчисленное множество.
Как видно, поступательное перемещение плоской фигуры различно в различных вариантах, а угол поворота и направление поворота одинаковы:
![]() (11.1)
(11.1)
Из этого следует, что всякое непоступательное перемещение плоской фигуры в ее плоскости можно рассматривать как совокупность двух перемещений: поступательного перемещения плоской фигуры вместе с произвольной точкой, называемой полюсом, и поворота вокруг полюса.
При этом поступательное перемещение зависит от выбора полюса, числовая величина угла поворота и направление поворота от выбора полюса не зависят.
Из вышеизложенного следует, что действительное движение плоской фигуры в ее плоскости в каждый момент времени можно рассматривать как совокупность поступательного движения и вращения. Поступательная часть движения фигуры зависит от выбора полюса и определяется его движением.
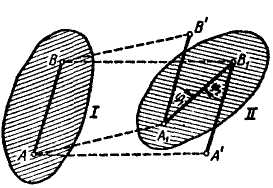

Рис. 11.4 Рис. 11.5
Приняв
за полюс некоторую точку О
и обозначив
![]() ее координаты
в неподвижной системе хО1у
(рис. 11.5),
можно определить движение полюса О,
а следовательно, и поступательное
движение всей фигуры уравнениями
ее координаты
в неподвижной системе хО1у
(рис. 11.5),
можно определить движение полюса О,
а следовательно, и поступательное
движение всей фигуры уравнениями
![]() и
и
![]() .
.
Для получения угла, характеризующего вращательную часть движения плоской фигуры, проведем через полюс О две полупрямые Оа и Ob, из которых Оа не принадлежит плоской фигуре и движется поступательно вместе с полюсом О, a Ob принадлежит этой фигуре и вместе с ней вращается вокруг полюса О.
Обозначив
![]() ,
можно определить вращательное движение
фигуры уравнением вращения
,
можно определить вращательное движение
фигуры уравнением вращения
![]() .
Таким образом, движение плоской фигуры
в ее плоскости, а следовательно, и
движение всего тела определяются тремя
уравнениями, называемыми уравнениями
плоского движения твердого тела:
.
Таким образом, движение плоской фигуры
в ее плоскости, а следовательно, и
движение всего тела определяются тремя
уравнениями, называемыми уравнениями
плоского движения твердого тела:
![]() (11.2)
(11.2)
Пример
1. Колесо
радиуса R =
0,4 м
катится по прямолинейному горизонтальному
рельсу с постоянной угловой скоростью
![]() = 2 рад/с
(рис. 11.6). Записать уравнения плоского
движения колеса, если центр колеса имеет
постоянную скорость:
= 2 рад/с
(рис. 11.6). Записать уравнения плоского
движения колеса, если центр колеса имеет
постоянную скорость:
![]() =
0,8 м/с.
=
0,8 м/с.
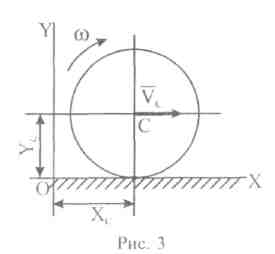
Рис. 11.6
Решение. Так как колесо движется равномерно, то координата центра колеса по оси х будет равна:
![]() м.
м.
Координата центра колеса по оси у постоянна и равна радиусу:
![]() м.
м.
Угол поворота колеса при равномерном вращении равен:
![]() рад.
рад.
Ответ.
![]() =
0,8t
м;
=
0,8t
м;
![]() = 0,4 м;
= 0,4 м;
![]() = 2t
рад.
= 2t
рад.