

3 Скорость и ускорение точек, вращающегося тела
Выберем
произвольную точку М
твердого тела (![]() ),
вращающегося вокруг неподвижной оси
OZ
(рис. 10.5). Движение точки М можно описать
радиусом-вектором
),
вращающегося вокруг неподвижной оси
OZ
(рис. 10.5). Движение точки М можно описать
радиусом-вектором
![]() ,
который имеет постоянный модуль для
выбранной точки:
,
который имеет постоянный модуль для
выбранной точки:
![]() .
(10.5)
.
(10.5)
Дифференцируя (10.5) по времени, находим скорость:
![]() ,
(10.6)
,
(10.6)

Рис. 10.5
где
![]() ,
так как вектор
,
так как вектор
![]() постоянен по величине и направлению
как производная вектора постоянного
модуля по скалярному аргументу.
постоянен по величине и направлению
как производная вектора постоянного
модуля по скалярному аргументу.
Тогда
![]() ,
(10.7)
,
(10.7)
где
![]() .
(10.8)
.
(10.8)
(h — расстояние от точки до оси вращения).
Вектор скорости будет направлен по касательной к траектории точки М в соответствии с направлением угловой скорости.
Пример
4. Точка А,
лежащая на ободе диска, имеет скорость
![]() = 40 см/с.
Точка В,
принадлежащая диску, имеет скорость
= 40 см/с.
Точка В,
принадлежащая диску, имеет скорость
![]() = 10 см/с
(рис. 10.6). Определить угловую скорость
диска и его радиус, если расстояние АВ
= 15 см.
= 10 см/с
(рис. 10.6). Определить угловую скорость
диска и его радиус, если расстояние АВ
= 15 см.
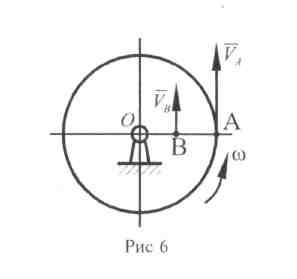
Рис. 10.6
Решение. Применим формулу (8)
![]() ,
,
![]() .
.
Тогда
![]() ,
,
пли
![]() ,
,
откуда
![]() ,
,
![]() ,
,
![]() см,
см,
![]() рад/с.
рад/с.
Ответ. R=20 см, ω=2 рад/с.
Получим
векторную формулу Эйлера для скорости
любой точки твердого тела, вращающегося
вокруг неподвижной оси. Из рис. 10.5 видно,
что
![]() .
Тогда
.
Тогда
![]() .
Это выражение является модулем
векторного произведения
.
Это выражение является модулем
векторного произведения
![]() ,
т.е.
,
т.е.
![]() .
Направление вектора скорости
.
Направление вектора скорости
![]() определяется векторным произведением.
Следовательно:
определяется векторным произведением.
Следовательно:
![]() .
(10.9)
.
(10.9)
Это выражение называют векторной формулой Эйлера.
Скорость любой точки твердого тела, вращающегося вокруг неподвижной оси, равна векторному произведению вектора угловой скорости на радиус-вектор этой точки, проведенный из произвольной точки на оси вращения.
Определим ускорение точки М:
![]() ,
,
так как
![]() ,
,
то
![]() .
(10.10)
.
(10.10)
Рассмотрим
слагаемые, входящие в это выражение.
Вектор
![]() в соответствии с правилом векторного
произведения направлен по касательной
к траектории точки М,
т. е. как касательное ускорение точки
М,
которое во вращательном движении
называют вращательным ускорением (рис.
10.7):
в соответствии с правилом векторного
произведения направлен по касательной
к траектории точки М,
т. е. как касательное ускорение точки
М,
которое во вращательном движении
называют вращательным ускорением (рис.
10.7):
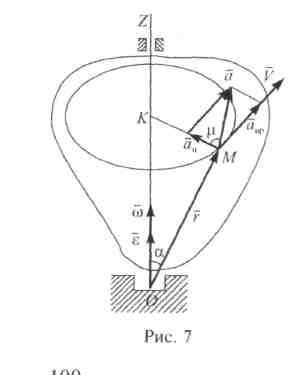
Рис. 10.7
![]() .
(10.11)
.
(10.11)
Величина вращательного ускорения
![]() ,
,
![]() .
(10.12)
.
(10.12)
Вектор
![]() находится в плоскости окружности
радиуса КМ
= h,
направлен от точки М
к оси вращения и является нормальным
ускорением точки М.
При вращательном движении это ускорение
называют центростремительным ускорением:
находится в плоскости окружности
радиуса КМ
= h,
направлен от точки М
к оси вращения и является нормальным
ускорением точки М.
При вращательном движении это ускорение
называют центростремительным ускорением:
![]() .
(10.13)
.
(10.13)
Величина центростремительного ускорения:
![]() ,
,
где
![]() ,
,
![]() .
(10.14)
.
(10.14)
Модуль полного ускорения точки, вращающегося твердого тела
![]() .
(10.15)
.
(10.15)
Угол между полным ускорением и центростремительным равен:
![]() .
(10.16)
.
(10.16)
Выражения (10.8) и (10.15) показывают, что скорости и ускорения точек вращающегося твердого тела пропорциональны расстояниям от этих точек до оси вращения, а из формулы (10.16) следует, что угол отклонения полного ускорения от центростремительного в каждый момент времени один и тот же для всех точек тела.
Уравнение равномерного вращения тела. Вращение тела с постоянной угловой скоростью называется равномерным. Составим уравнение равномерного вращения тела с угловой скоростью ω, принимая направление этого вращения за положительное направление отсчета угла поворота φ.
Положим, что в начальный момент to=0 угол поворота имеет значение φ0. Тогда
![]() .
.
Проинтегрируем уравнение в пределах, соответствующих начальному моменту t0 = 0 и произвольному моменту времени t:
 ,
,
откуда
![]() (10.17)
(10.17)
Выражение (10.17) является уравнением равномерного вращения тела. Если в начальный момент времени подвижная полуплоскость Q совпадает с неподвижной полуплоскостью Р, т. е. φ0 = 0, то уравнение равномерного вращения тела (10.17) принимает вид
![]()
Из
уравнения равномерного вращения тела
при
![]()
![]() ,
,
т. е. угловая скорость равномерного вращения тела равна отношению приращения угла поворота за некоторый промежуток времени к этому промежутку времени.
Число оборотов, совершаемых вращающимся телом за единицу времени (обычно за минуту), называется частотой вращения и обозначается n. Так как один оборот равен 2π радиан, то зависимость между угловой скоростью ω (рад/с) и частотой вращения n (об/мин) имеет вид
![]() ,
,
![]() .
.
Уравнение равнопеременного вращения тела. Вращение тела, при котором угловое ускорение постоянно, называют равнопеременным вращением. При этом, если абсолютная величина угловой скорости увеличивается, вращение называют равноускоренным, и если уменьшается - равнозамедленным.
Составим
уравнение равнопеременного вращения,
полагая, что в начальный момент t0
= 0
начальная угловая скорость
![]() ,
а начальное значение угла поворота
φ0.
Тогда
,
а начальное значение угла поворота
φ0.
Тогда
![]() .
.
Проинтегрируем уравнение в пределах, соответствующих начальному моменту t0=0 н произвольному моменту времени t:
![]() ,
(10.18)
,
(10.18)
![]() .
.
Проинтегрируем это уравнение в соответствующих пределах:
![]()
![]() .
(10.19)
.
(10.19)
Уравнение (10.19) является уравнением равнопеременного вращения тела.
Так
как равнопеременное вращение происходит
обычно в одном направлении, то
![]() где знак плюс соответствует ускоренному
вращению, а знак минус
- замедленному.
Учитывая это, формулам
(18) и
(19 можно
придать более удобный для решения задач
вид:
где знак плюс соответствует ускоренному
вращению, а знак минус
- замедленному.
Учитывая это, формулам
(18) и
(19 можно
придать более удобный для решения задач
вид:
![]() .
.
Из
формулы угловой скорости находим
![]() ,
т. е.
при
равнопеременном вращении абсолютное
значение углового ускорения тела равно
отношению изменения угловой скорости
тела за некоторый промежуток времени
к числовой величине этого промежутка.
,
т. е.
при
равнопеременном вращении абсолютное
значение углового ускорения тела равно
отношению изменения угловой скорости
тела за некоторый промежуток времени
к числовой величине этого промежутка.
Пример 5. Вал начинает вращаться равноускоренно из состояния покоя; в первые 20 с он совершает 100 оборотов. Каковы его угловые скорость и ускорение по истечении 20 с?
Решение. Так как вал начинает вращаться из состояния покое, то ω0=0. В этом случае при φ0=0
![]() ,
(1)
,
(1)
![]() (2)
(2)
Из уравнения (1) находим
![]() ,
(3)
,
(3)
где
![]() .
.
Подставляя в (3) числовые значения, находим
![]()