

Лекция 7 центр тяжести
1. Центр параллельных сил
Рассмотрим
систему параллельных сил
![]() ,
приложенных
к твердому телу в точках
,
приложенных
к твердому телу в точках
![]() (рис.
7.1). Эта система имеет
равнодействующую
,
направленную
так же, как слагаемые силы,
причем по модулю
(рис.
7.1). Эта система имеет
равнодействующую
,
направленную
так же, как слагаемые силы,
причем по модулю
![]() .
.
Если теперь каждую из сил системы поворачивать около ее точки приложения в одну и ту же сторону и на один и тот же угол, то мы будем получать новые системы одинаково направленных параллельных сил с теми же модулями и точками приложения, но с другим общим направлением (пунктирные линии на рис. 7.1).
Равнодействующая каждой из таких систем параллельных сил будет иметь тот же модуль R, но всякий раз другую линию действия.
Покажем,
что при всех поворотах линия действия
равнодействующей
всегда проходит через одну и ту же точку
С.
В самом деле, сложив
сначала силы
![]() и
и
![]() ,
найдем,
что их равнодействующая
,
найдем,
что их равнодействующая
![]() ,
при
любых поворотах сил будет проходить
через точку
,
при
любых поворотах сил будет проходить
через точку
![]() ,
лежащую
на
прямой
,
лежащую
на
прямой
![]() ,
и
удовлетворять равенству
,
и
удовлетворять равенству
![]() ,
так
как при
поворотах сил ни положение прямой
,
ни
это равенство не меняется.
Складывая теперь силу
,
с силой
,
так
как при
поворотах сил ни положение прямой
,
ни
это равенство не меняется.
Складывая теперь силу
,
с силой
![]() ,
мы
получим, что их равнодействующая
будет проходить через аналогично
определяемую точку
,
мы
получим, что их равнодействующая
будет проходить через аналогично
определяемую точку
![]() ,
лежащую
на прямой
,
лежащую
на прямой
![]() ,
и
т.д. Доведя эту операцию последовательного
сложения до конца, мы убедимся, что
равнодействующая
,
и
т.д. Доведя эту операцию последовательного
сложения до конца, мы убедимся, что
равнодействующая
![]() всех
сил действительно проходит всегда через
одну и ту же точку С,
положение
которой по отношению к точкам
будет
неизменным.
всех
сил действительно проходит всегда через
одну и ту же точку С,
положение
которой по отношению к точкам
будет
неизменным.
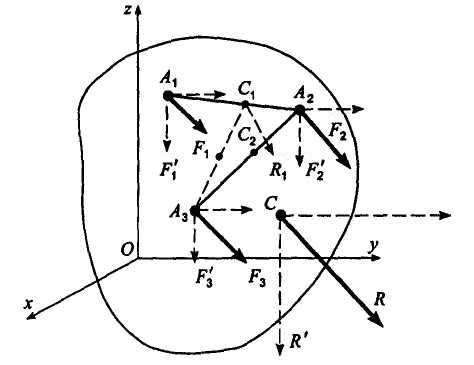
Рис. 7.1
Точка С, через которую проходит линия действия равнодействующей системы параллельных сил при любых поворотах этих сил около их точек приложения в одну и ту же сторону и на один и тот же угол, называется центром параллельных сил.
Найдем
координаты центра параллельных сил.
Выберем оси координат
Oxyz
и
обозначим координаты точек:
![]() ,
,
![]() ,…,
,…,
![]() .
Повернем
сначала силы так, чтобы они были
параллельны оси Oz,
и
применим к силам
теорему
Вариньона. Так как
.
Повернем
сначала силы так, чтобы они были
параллельны оси Oz,
и
применим к силам
теорему
Вариньона. Так как
![]() является
равнодействующей этих сил, то, вычисляя
моменты относительно оси Оу,
получим
является
равнодействующей этих сил, то, вычисляя
моменты относительно оси Оу,
получим
![]() .
.
Отсюда
находим (имеем в виду, что
![]() )
)
![]() .
(7.1)
.
(7.1)
Для
координаты
![]() аналогичные
формулы получим, вычисляя моменты
относительно оси Ох.
Чтобы
определить
аналогичные
формулы получим, вычисляя моменты
относительно оси Ох.
Чтобы
определить
![]() ,
повернем
все силы,
сделав их параллельными оси Оу.
Применив
к этим силам теорему
Вариньона, вычислим моменты относительно
оси Ох.
,
повернем
все силы,
сделав их параллельными оси Оу.
Применив
к этим силам теорему
Вариньона, вычислим моменты относительно
оси Ох.
Окончательно получим следующие формулы для координат центра параллельных сил:
![]() .
(7.2)
.
(7.2)
2 Центр тяжести твердого тела
Центром тяжести тела называют геометрическую точку, через которую проходит равнодействующая сила всех сил тяжести, действующих на частицы тела при любом его положении в пространстве. Она совпадает с центром системы параллельных сил, которую приближенно образуют силы тяжести его элементарных частиц (рис. 7.2).
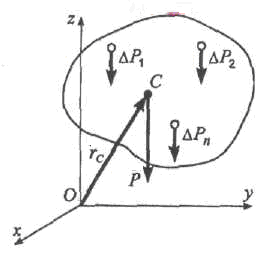
Рис. 7.2
Радиус-вектор
центра тяжести тела
![]() вычислим
по формуле
вычислим
по формуле
![]() .
(7.3)
.
(7.3)
где
![]() - радиус-вектор точки приложения силы
тяжести элементарной части
тела, принятой за точку;
- радиус-вектор точки приложения силы
тяжести элементарной части
тела, принятой за точку;
![]() - сила
тяжести элементарной частицы; Р
- -
сила тяжести всего тела.
- сила
тяжести элементарной частицы; Р
- -
сила тяжести всего тела.
Если в (7.3) перейти к пределу, увеличивая число элементарных частей п до бесконечности, то после замены суммы интегралом получим
 .
(7.4)
.
(7.4)
В проекциях на оси координат из (7.3 и (7.4) получим
![]() ,
(7.5)
,
(7.5)
![]() .
.
Для однородного твердого тела силу тяжести элементарной частицы тела можно вычислить по формуле
![]() ,
,
где
![]() - удельный вес тела;
- удельный вес тела;
![]() - объем
элементарной частицы.
- объем
элементарной частицы.
Сила тяжести всего тела
![]() ,
,
где V - объем тела.
Подставляя эти значения в уравнения (7.3) и (7.4), после сокращения на у получим формулы:
![]() ,
(7.6)
,
(7.6)
по которым определяют центр тяжести тела.
По аналогии, для плоских тел, у которых один размер мал по сравнению с двумя другими, имеем
![]() ,
(7.7)
,
(7.7)
где
![]() - площадь элементарной частицы поверхности;
А
-
площадь всей
поверхности.
- площадь элементарной частицы поверхности;
А
-
площадь всей
поверхности.
Для однородных тел типа проволоки, у которых два размера малы по сравнению с третьим, определим радиус-вектор центра тяжести по формулам
![]() ,
(7.8)
,
(7.8)
где
![]() -
длина элемента линии; L
-
общая длина линии.
-
длина элемента линии; L
-
общая длина линии.