

1.2. Скорость
Р
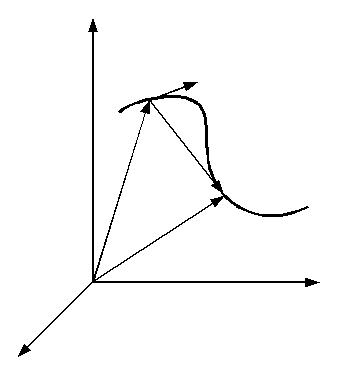 Рис.1.2
Рис.1.2![]() ,
а в момент времени t2
– положение В, определяемое радиус-вектором
,
а в момент времени t2
– положение В, определяемое радиус-вектором
![]() .
Вектор
.
Вектор
![]() ,
проведенный из начальной точки А в
конечную В, характеризует изменение
пространственного положения точки за
данный промежуток времени
,
проведенный из начальной точки А в
конечную В, характеризует изменение
пространственного положения точки за
данный промежуток времени
![]() и называется вектором перемещения.
Отрезок траектории
и называется вектором перемещения.
Отрезок траектории
![]() ,
заключенный между точками А и В, называется
путем, пройденным за тот же промежуток
времени
,
заключенный между точками А и В, называется
путем, пройденным за тот же промежуток
времени
![]() .
В общем случае путь
.
В общем случае путь![]() отличен по величине от модуля вектора
перемещения
отличен по величине от модуля вектора
перемещения
![]() ,
однако это различие будет тем меньше,
чем меньше
,
однако это различие будет тем меньше,
чем меньше
![]() .
Если устремить
.
Если устремить
![]() к нулю, то
к нулю, то
![]() ,
т.е. для бесконечно малого перемещения
справедливо равенство
,
т.е. для бесконечно малого перемещения
справедливо равенство
![]() .
.
Для характеристики направления и
быстроты движения материальной точки
вводится понятие скорости. Введем
вначале понятие вектора средней скорости.
Отношение вектора перемещения
![]() за некоторый интервал времени
за некоторый интервал времени
![]() к его величине называется вектором
средней скорости за данное время
к его величине называется вектором
средней скорости за данное время
![]() .
(1.4΄)
.
(1.4΄)
Вектор
![]() направлен так же, как
направлен так же, как![]() ,
т.е. вдоль хорды АВ. Если промежуток
времени
,
т.е. вдоль хорды АВ. Если промежуток
времени
![]() уменьшать, то при достижении им достаточно
малых значений вектор
уменьшать, то при достижении им достаточно
малых значений вектор
![]() практически перестанет изменяться как
по величине, так и по направлению. Это
означает, что при
практически перестанет изменяться как
по величине, так и по направлению. Это
означает, что при
![]() отношение (1.4΄) стремится к некоторому
пределу, определяющему вектор скорости
в момент времени t
:
отношение (1.4΄) стремится к некоторому
пределу, определяющему вектор скорости
в момент времени t
:
![]() .
(1.5)
.
(1.5)
Таким образом, вектор скорости материальной точки в данный момент времени есть первая производная ее радиус-вектора по времени. Вектор скорости в любой точке траектории направлен по касательной к траектории точки в сторону ее движения.
Модуль вектора скорости равен
![]() ,
(1.6)
,
(1.6)
т.е. величина скорости в данный момент времени равна производной пути по времени.
Вектор скорости, как и всякий другой вектор, можно разложить на его составляющие по осям координат
![]() . (1.7)
. (1.7)
С другой стороны
![]() .
(1.8)
.
(1.8)
Из сравнения (1.6) и (1.7) следует, что
![]() ,
(1.9)
,
(1.9)
т.е. проекции вектора скорости на координатные оси равны производным по времени соответствующих координат точки. При этом численное значение скорости можно представить также в виде
![]() .
(1.10)
.
(1.10)
В соответствии с экспериментальным принципом независимости движений, если точка одновременно участвует в нескольких движениях, то результирующее перемещение точки равно векторной сумме перемещений, совершаемых за то же время в каждом из движений порознь. Такой же вывод можно сделать и для скорости движения, получивший название закона сложения скоростей
![]() ,
(1.11)
,
(1.11)
где
![]() - скорость материальной точки при i-м
независимом движении, n
– число таких движений.
- скорость материальной точки при i-м
независимом движении, n
– число таких движений.
Таким образом, при трехмерном (или двухмерном) движении мы можем рассматривать перемещение и скорость точки в направлении любой оси координат независимо от того, как она движется относительно других осей.