

7.4. Потенціальна завадостійкість при прийомі ам, чм та фм сигналів.
Помехоустойчивость при приеме амплитудно-моделированных сигналов.
Принцип построения модулятора при АМ:
Канал
связи







При
использовании АМ справедливы выражения

 .
Напряжение канального сигнала записывается
в виде
.
Напряжение канального сигнала записывается
в виде
 ,
где
,
где
 -
порядковый номер символа;
-
порядковый номер символа;
 -
номер позиции кода с основанием
-
номер позиции кода с основанием
 ;
;
 -
функция, описывающая форму импульсного
сигнала;
-
функция, описывающая форму импульсного
сигнала;
 -
коэффициент амплитудной модуляции.
-
коэффициент амплитудной модуляции.
Структурная схема демодулятора АМ сигналов приведена на рис. 1.
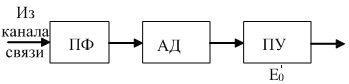
Рис. 1. Структурная схема демодулятора АМ сигнала.
Единственным
критерием, который позволяет различать
элементы, соответствующие 1
и 0,
есть величина амплитуды колебаний. Если
напряжение на выходе детектора приемника
превышает некоторое пороговое значение,
то фиксируется сигнал 1,
если это напряжение ниже, то фиксируется
сигнал 0.
В соответствии с этим демодулятор
двоичных АМ сигналов, структурная схема
которого приведена на рис.1, состоит из
полосового фильтра (ПФ), который
обеспечивает защиту от сосредоточенных
помех и снижение уровня флуктуационных
помех, амплитудного детектора (АД),
выделяющего огибающую принимаемого
сигнала, и порогового устройство (ПУ) с
порогом
 .
.
Ошибки
при приеме возникают, если при передаче
1
суммарное напряжение сигнала и помехи
на выходе приемника
 будет ниже порога
будет ниже порога ,
т.е.
,
т.е. ,
и если при передаче0
напряжение помех окажется больше
,
и если при передаче0
напряжение помех окажется больше
 ,
т.е.
,
т.е. .
.
Поскольку при передаче данных вероятности передачи 1 и 0 обычно равны, т.е. Р(1) = Р(0) = 0,5, то справедливо выражение
 . (1)
. (1)
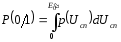
В
соответствии с приведенными на рис. 2
зависимостями распределения для
 и
и можно определить вероятности ошибок
Р(0/1) и Р(1/0):
можно определить вероятности ошибок
Р(0/1) и Р(1/0):
 ;
;
 .
.

Рис. 2 К выводу вероятности ошибки
Тогда получим:
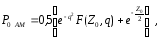 (2)
(2)
где:
 ;
; ;
; ,
,
где:
 _
эффективное напряжение сигнала.
_
эффективное напряжение сигнала.
Как
видно из выражения (2), величина
 зависит от отношения сигнал / помеха и
от величины порога
зависит от отношения сигнал / помеха и
от величины порога .
.
Существует
оптимальное значение порога, который
зависит от величины q.
На рис.3 показана зависимость относительного
значения порога
 от отношения сигнал / помеха по напряжениюq.
Из этого рисунка видно, что при большом
значении q
величина
от отношения сигнал / помеха по напряжениюq.
Из этого рисунка видно, что при большом
значении q
величина
 стремится к 0,5.
стремится к 0,5.

Рис.3
зависимость

Для
ориентировочных расчетов вероятности
ошибки при воздействии флуктуационных
помех при q>3
и
 можно использовать формулу:
можно использовать формулу:
 (4)
(4)
Помехоустойчивость при приеме ЧМ сигналов
При
использовании ЧМ справедливы равенства
 ;
; .
.
При использовании ЧМ с непрерывной фазой мгновенная частота изменяется по закону:

Наибольшее применение при использовании ЧМ сигналов находит фильтровой метод приема. В этом случае демодулятор состоит из полосового фильтра (ПФ), ограничителя (ОГР).
Частотный
дискриминатор включает два полосовых
фильтра, настроенных соответственно
на частоты
 и
и (ПФ
(ПФ и ПФ
и ПФ ),
амплитудные детекторы (АД), устройство
сравнение (УС) и решающее устройство
(РУ) (рис. 4).
),
амплитудные детекторы (АД), устройство
сравнение (УС) и решающее устройство
(РУ) (рис. 4).
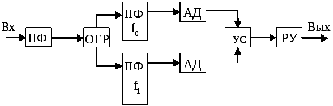
Рис. 4 Демодулятор ЧМ сигнала
Предположим, что энергия посылок 1 и 0, полоса пропускания полосовых фильтров и усиление каналов "единиц" и "нулей" соответственно одинаковые. В этом случае схема приемника симметричная для приема единиц и нулей, поэтому Р (0/1) = Р (1/0) .
Ошибка
при приеме возникает в том случае, когда
значение огибающей помехи
 на выходе фильтра, через который в данный
момент сигнал не проходит, превышает
значение огибающей суммы сигнала и
помехи
на выходе фильтра, через который в данный
момент сигнал не проходит, превышает
значение огибающей суммы сигнала и
помехи на выходе другого фильтра, через который
в данный момент проходит сигнал, т.е.
на выходе другого фильтра, через который
в данный момент проходит сигнал, т.е. .
Кривые плотности распределения огибающей
сигнала с помехой и помехи приведены
на рис.5. Каждому текущему значению
.
Кривые плотности распределения огибающей
сигнала с помехой и помехи приведены
на рис.5. Каждому текущему значению соответствует определенная вероятность
соответствует определенная вероятность .
его превышения огибающей напряжения
помехи
.
его превышения огибающей напряжения
помехи .
.
 .
.
Однако
величина
 является случайной и может принимать
с некоторой вероятностью любое значение
в интервале 0 ≤
является случайной и может принимать
с некоторой вероятностью любое значение
в интервале 0 ≤ ≤
≤ .
.
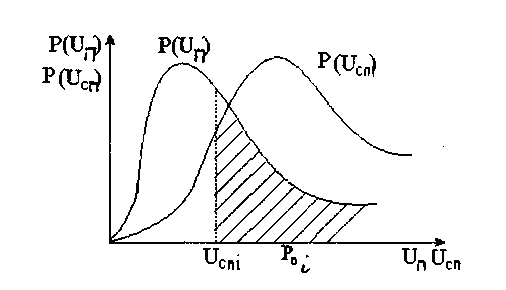
Рис.5. К выводу вероятности ошибки.
Поэтому
вероятность
 также есть случайна и для определения
вероятности
также есть случайна и для определения
вероятности необходимо вероятность
необходимо вероятность усреднить по всем значением величины
усреднить по всем значением величины .
.
В результате получим
 (5.10)
(5.10)
Подставив
выражения для
 и
и ,
после интегрирования получим:
,
после интегрирования получим:

Помехоустойчивость при частотной модуляции становится заметно выше, чем при АМ. Однако при этом следует учитывать, что при одинаковой амплитуде сигнала средняя мощность передатчика при ЧМ, как во всякой системе с активной паузой, должна быть вдвое больше, чем при АМ.
Помехоустойчивость при приеме ФМ сигналов
При использовании двоичных сигналов напряжение посылки при передаче 1 и 0 соответственно изменяется по закону:

или

Демодулятор ФМ сигналов (рис.6) состоит из полосового фильтра (ПФ), ограничителя (ОГР), фазового детектора (ФД), устройства формирования опорного напряжения (УФОН), и решающего устройства (РУ).
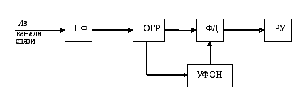
Рис.6. схема демодулятора.
Напряжение
узкополосной помехи
 на входе фазового детектора можно
представить в виде суммы двух гармонических
составляющих частоты ω - синфазной с
сигналом и квадратурной (сдвинутой по
фазе относительно сигнала на 90°):
на входе фазового детектора можно
представить в виде суммы двух гармонических
составляющих частоты ω - синфазной с
сигналом и квадратурной (сдвинутой по
фазе относительно сигнала на 90°):

Найдем выражение для вероятности ошибки при воздействии флуктуационных помех в случае равновероятных посылок 1 и 0. Величины Р(0/1) и Р(1/0) соответствуют площади заштрихованных участков распределения на рис.5.16.
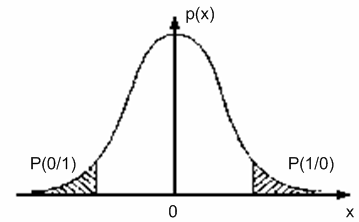
Рис.7 К выводу вероятности ошибки.
С учетом изложенного вероятность ошибки при приеме двоичных ФМ сигналов определяется соотношением:

 ,
,
где
 .
.
Помехоустойчивость ФМ значительно выше, чем ЧМ и особенно АМ.