

4.6. Характеристика керованості і спостережності. Постановка завдання. Критерії керованості і спостережності.
Дана линейная многомерная стац. система управления, которая описывается уравнением состояния:
 (1)
(1)
 ,
где х – n-мерный вектор состояния, u -
r-мерный вектор направления, t – время
,
где х – n-мерный вектор состояния, u -
r-мерный вектор направления, t – время
 ,
у – к-мерный вектор выхода.
,
у – к-мерный вектор выхода.
A – n*n; B – n*r; C – k*n
С-ма (1) называется вполне управляемой по состоянию, если выбору управления воздействует u(t) из k нач. сост. x(t0) в произв. заранее задан. сост. x(t1).
С-ма (1) вполне управляема по восходу, если выбор упр. возд. u(t) на [t0, t1] можно перевести систему из любого начального состояния x(t0) в такое конечное состояние, при котором обеспечив заранее заданное произведение значений выхода y(t1).
С-ма (1) вполне наблюдаема, если по реакции y(t) на выходе с-мы на [t0, t1] при заданном управлении воздействия u(t) можно определить начальное состояние x(t0). Пусть известны матрицы А, В, С с-мы (1). Требуется определить, является ли система вполне управляемой и наблюдаемой. Критерий управляемости по состоянию: для того чтобы с-ма (1) была управляема по состоянию, необходимо и достаточно, чтобы ранг матрицы управления по состоянию равнялся n:
W=(B AB A2*B … An-1*B); rang W=n (2)
Ранг – это наибольшее натуральное число k, при котором в рассмотренной матрице имеется отличный от нуля минор порядка k.
Минор – определитель порядка k, полученный из заданной n*m матрицы путем удаления некоторых m-k строк и n-k столбцов.
Критерий управляемости по выходу: для того, чтобы с-ма (1) была управляема по выходу, необходимо и достаточно, чтобы ранг матрицы Р равнялся вектору выхода.
Р=(СВ САВ СА2В … САn-1В)
rang P=k (3)
Критерий наблюдаемости: для того, чтобы с-ма была вполне наблюдаема, необходимо и достаточно, чтобы ранг матрицы Q был равен размер. вектора состояния:
Q=(CT ATCT (AT)2CT … (AT)n-1CT) rang Q=n (4)
Алгоритм решения задачи
В ур-х состояния и выхода необходимо определить матрицы А,В и С.
Составить (вычислить) W управляемости по состоянию, управляемости по выходу Р, матрицу наблюдаемости Q.
Рассчитать ранги этих матриц и сделать выводы на основе данных критериев.
Замечание: если стационарная с-ма упр. записана:
an(x(n)(t)+…+a0x(t))=g(t) y(t)=x(t) (5) то вводя обозначения : х1=х; х2=х;…; хn=x(n-1), u=g тогда выражение (5) необходимо преобразовать в эквивалентную ф-лу записи с выдел. матриц А,В,С, а затем решать задачу.
6.1 Основні теоретико-множинні (об’єднання, пересічення, віднімання, декартовий добуток) операції реляційної алгебри. Коротка характеристика та приклади.
Язык называется реляционно полным, если он позволяет получить любое отношение, которое можно вывести с помощью реляционного исчисления.
Реляционная алгебра (процедурный язык) – это теоретический язык операций позволяющий создавать на основе одного или более отношений другое отношение, при этом без изменения самих исходных значений.
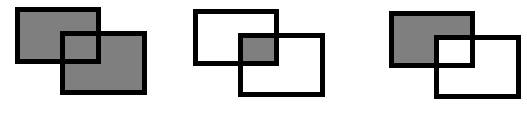
Объединение
Пересечение Разность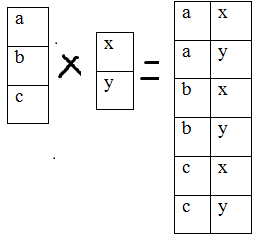
- Декартовое произведение
Операции с множествами:
Объединение R U S. Объединение 2х отношений R и S определяет новое отношение, которое включает все кортежи содержащиеся только в R, только в S, одновременно в R и S, причем все дубликаты кортежей исключены. При этом отношения R и S должны быть совместимы по объединению.
Разность R – S. Разностью 2х отношений R и S состоит из кортежей, которые есть в отношении R, но отсутствуют в отношении S, причем отношения R и S должны быть совместимы по объединению.
Пересечение
R
 S.
Операция пересечения определяет
отношение, которые содержат кортежи
присутствующие как в отношении R,
так и в отношении
S.
R
и
S
должны быть совместимы по объединению.
S.
Операция пересечения определяет
отношение, которые содержат кортежи
присутствующие как в отношении R,
так и в отношении
S.
R
и
S
должны быть совместимы по объединению.
Декартовое произведение R х S. Декартовое произведение определяет новое отношение, которое является результатом конкатенации (сцепления) каждого кортежа из R с каждым кортежем из S.