

7.2) Модели детерминированных цифровых сигналов
При передаче цифрового сигнала на дальние расстояния, он начинает терять одно из своих самых важных свойств: помехозащищенность. Это связано с тем, что в качестве среды, как правило, используется воздушное пространство в случае радиопередачи и проводные каналы связи, а цифровой сигнал в этих средах очень быстро затухает. Использовать ретрансляторы через каждые несколько сотен метров при передаче на дальние расстояния экономически неэффективно. Кроме того, это не всегда технически реализуемо, в частности в сотовых системах связи максимальная удаленность мобильной станции от базовой станции может достигать 35 км. Также есть еще одно важное свойство, требуемое для цифрового канала связи – широкополосность. Цифровой сигнал с резкими переходами между уровнями требует широкой полосы для его передачи. В противном случае переходы между уровнями будут "заламываться" и сигнал будет "смазанным", что может привести к высокому проценту ошибок. Для решения этих проблем используют различные методы модуляции цифровых сигналов.
АМ
При
использовании АМ справедливы выражения

 .
Напряжение канального сигнала записывается
в виде
.
Напряжение канального сигнала записывается
в виде
 ,
где
,
где
 -
порядковый номер символа;
-
порядковый номер символа;
 -
номер позиции кода с основанием
-
номер позиции кода с основанием
 ;
;
 -
функция, описывающая форму импульсного
сигнала;
-
функция, описывающая форму импульсного
сигнала;
 -
коэффициент амплитудной модуляции.
-
коэффициент амплитудной модуляции.
Структурная схема демодулятора АМ сигналов:

Единственным
критерием, который позволяет различать
элементы, соответствующие 1
и 0,
есть величина амплитуды колебаний. Если
напряжение на выходе детектора приемника
превышает некоторое пороговое значение,
то фиксируется сигнал 1,
если это напряжение ниже, то фиксируется
сигнал 0.
В соответствии с этим демодулятор
двоичных АМ сигналов, состоит из
полосового фильтра ПФ, который обеспечивает
защиту от сосредоточенных помех и
снижение уровня флуктуационных помех,
амплитудного детектора (АД), выделяющего
огибающую принимаемого сигнала, и
порогового устройство (ПУ) с порогом
 .
.
ЧМ
При
использовании ЧМ справедливы равенства
 ;
; .
.
При использовании ЧМ с непрерывной фазой мгновенная частота изменяется по закону:
Наибольшее применение при использовании ЧМ сигналов находит фильтровой метод приема. В этом случае демодулятор состоит из полосового фильтра (ПФ), ограничителя (ОГР).
Частотный
дискриминатор включает два полосовых
фильтра, настроенных соответственно
на частоты
 и
и (ПФ
(ПФ и ПФ
и ПФ ),
амплитудные детекторы (АД), устройство
сравнение (УС) и решающее устройство
(РУ) (рис.5.12).
),
амплитудные детекторы (АД), устройство
сравнение (УС) и решающее устройство
(РУ) (рис.5.12).
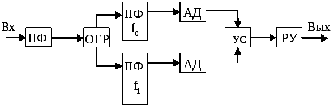
Предположим, что энергия посылок 1 и 0, полоса пропускания полосовых фильтров и усиление каналов "единиц" и "нулей" соответственно одинаковые. В этом случае схема приемника симметричная для приема единиц и нулей, поэтому Р (0/1) = Р (1/0) .
Помехоустойчивость при частотной модуляции становится заметно выше, чем при АМ. Однако при этом следует учитывать, что при одинаковой амплитуде сигнала средняя мощность передатчика при ЧМ, как во всякой системе с активной паузой, должна быть вдвое больше, чем при АМ.
ФМ
При использовании двоичных сигналов напряжение посылки при передаче 1 и 0 соответственно изменяется по закону:

или

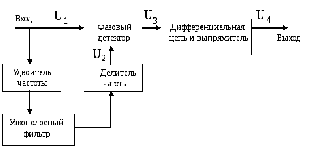
Демодулятор ФМ сигналов (рис.5. 14) состоит из полосового фильтра (ПФ), ограничителя (ОГР), фазового детектора (ФД), устройства формирования опорного напряжения (УФОН), и решающего устройства (РУ).

В
демодуляторе фаза принятых колебаний
сравнивается в фазовом детекторе с
фазой опорного напряжения .
Сравнение фаз колебаний осуществляется
путем перемножения принятого сигнала
и опорного напряжения и интегрирования.
.
Сравнение фаз колебаний осуществляется
путем перемножения принятого сигнала
и опорного напряжения и интегрирования.
Для разнообразных видов модуляции, помехоустойчивость ФМ значительно выше, чем ЧМ и особенно АМ. Основной технической проблемой, которая усложняет практическую реализацию фазовой модуляции, является проблема формирования в месте приема опорного напряжения, синфазного с сигналом.
Наиболее
часто формирование
 осуществляется из принимаемого сигнала.
Поскольку фаза принимаемого сигнала
изменяется в соответствии с передаваемым
сообщением, то необходимо исключить
влияние скачков фазы сигнала на фазу
опорного напряжения. Существует ряд
устройств, которые исключают указанное
влияние. Широко используется устройство,
которое предусматривает удвоение и
последующее деление частоты колебаний
напряжения сигнала.
осуществляется из принимаемого сигнала.
Поскольку фаза принимаемого сигнала
изменяется в соответствии с передаваемым
сообщением, то необходимо исключить
влияние скачков фазы сигнала на фазу
опорного напряжения. Существует ряд
устройств, которые исключают указанное
влияние. Широко используется устройство,
которое предусматривает удвоение и
последующее деление частоты колебаний
напряжения сигнала.

Делитель частоты на два имеет два устойчивых состояния, причем соответствующие им фазы исходных напряжений отличаются друг от друга на 180º. Под влиянием помех возможен скачкообразный переход делителя в другое устойчивое состояние, которое сопровождается изменением фазы опорного напряжения на 180º. Это вызывает изменение полярности элементов на выходе детектора, вследствие чего 1 регистрируется как 0 и наоборот. Этот эффект называют эффектом обратной работы. Поэтому при применении ФМ необходимо предусматривать меры по борьбе с обратной работой.
Относительная ФМ
Если при ФМ информация заключена в разности фазы сигнала и опорного напряжения, то при ОФМ (DPSK) передаваемая информация содержится в разности фаз последующей и предыдущей посылок. При передаче единицы фаза последующей посылки изменяется скачком на 180 , при передаче нуля фаза сигнала не меняется.
Путем
добавления или исключения импульсов
на входе двоичного счетчика можно
получить скачок фазы выходного напряжения
на величину ,
где
,
где -
число триггеров в счетчике. Поскольку
при ОФМ Δφ = 180º , модулятор должен
содержать один триггер (рис).
-
число триггеров в счетчике. Поскольку
при ОФМ Δφ = 180º , модулятор должен
содержать один триггер (рис).
На выходе триггера формируется напряжение в виде меандра, из которого с помощью ПФ выделяется первая гармоника, которая используется в качестве несущего колебания. Для модуляции несущего колебания методом ОФМ через логический элемент ИЛИ на вход триггера подается последовательность информационных импульсов с частотой, равной скорости модуляции В.
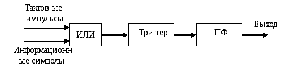
Импульсы этой последовательности несколько сдвинуты относительно тактовых и приводят к дополнительному переключению триггера, в результате чего фаза выходного напряжения изменяется на 180°, т.е. осуществляется модуляция фазы несущего колебания.
Структурна схема демодулятора ОФМ:
Многократные многопозиционные методы модуляции
Эффективными
средствами повышения пропускной
способности каналов является передача
сигналов с использованием многократной
модуляции. В этих системах модулируемый
параметр, (например, амплитуда, фаза,
частота) переносчика может принимать
не два (как при однократной модуляции),
а больше двух разнообразных значений.
В результате этого каждая передаваемая
посылка переносит большее количество
информации, чем при однократной модуляции,
что позволяет увеличить скорость
передачи информации, не изменяя
длительности посылки. Так, например,
при использовании кода с основанием
 (двукратная модуляция) скорость передачи
информации увеличивается вдвое в
сравнении с однократной модуляцией.
(двукратная модуляция) скорость передачи
информации увеличивается вдвое в
сравнении с однократной модуляцией.
В современных системах передачи дискретной информации наиболее широко применяется двукратная частотная модуляция (ДЧМ), двукратная ФМ (квадратная ФМ – QPSK – quadrature phase shift keying) и двукратная относительная фазовая модуляция (ДОФМ). Кроме этих видов модуляции, практическое применение находят амплитудно-относительная фазовая модуляция (АОФМ) и трехкратная относительная фазовая модуляция (ТОФМ), квадратурная амплитудная модуляция, которая представляет собой комбинацию двухуровневой АМ с ДОФМ.
Комбинированные методы модуляции
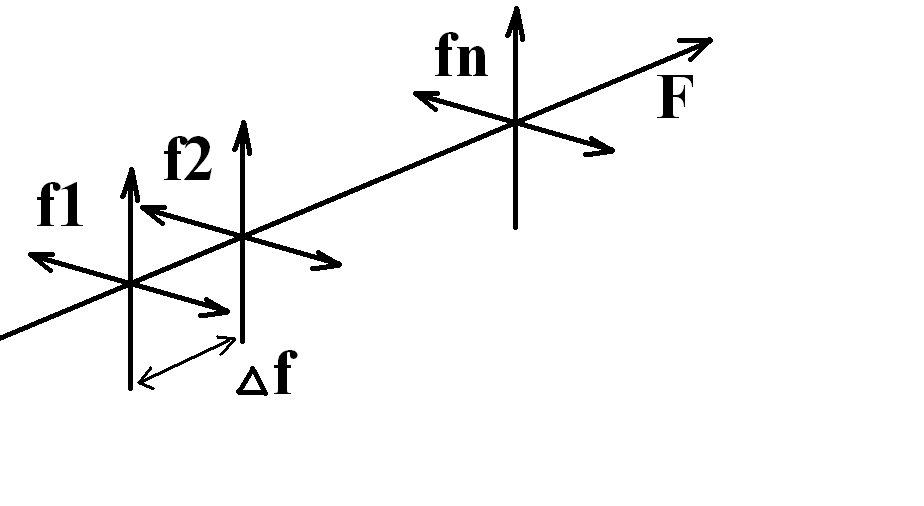
Наряду с многократными методами модуляции широкое применение находят комбинированные методы. В этом случае модуляции подлежит не один, а несколько параметров несущего колебания. Такими параметрами могут быть амплитуда и фаза. Относительная амплитудно-фазовая модуляция (АОФМ) представляет собой комбинации ОФМ с многоуровневой (чаще двухуровневой) AM. При передаче сигналов средством АОФМ информация заключена не только в соотношении фаз соседних посылок (как при ОФМ), а и в амплитуде сигнала (как при AM). В общем случае амплитуда сигнала может принимать η значений. На рис.5.26 показанная векторная диаграмма, которая объясняет принцип АОФМ при η=2.
Рис.5.26. К пояснению АОФМ
.
Увеличить скорость передачи можно, если модулировать не одно, а два несущих колебания, сдвинутых относительно друг друга на 90° Такой вид модуляции получил название квадратурной амплитудной модуляции. При квадратурной амплитудной модуляции (КАМ) два колебания, сдвинутых относительно друг друга на 90°, модулируется по фазе со скачком 180° и по амплитуде. Число градаций амплитуды может быть различно. В результате, например, при двух значениях амплитуды число возможных значений сигнала 4x4=16 Ансамбль сигналов удобно отображать с помощью пространственной точечной решетки (сигнального созвездия). Каждой точке сигнального созвездия, обозначающей конец вектора сигнала, соответствует А разрядов двоичного кода.

Сигнальное созвездие
Ортогональное частное разделение с мультиплексированием
При параллельной передаче их нескольким частотным каналам с целью экономии используемой полосы пропускания каждый частотный канал должен иметь как можно более узкий участок. В то же время для достижения большей скорости передачи ширина этого участка должна быть как можно больше, не допуская возникновения взаимных помех. Эти условия будут выполнены, если частотные каналы будут взаимоортогональны, т.е. частотно независимы. Такая частотная независимость будет обеспечена при выборе ортогональных поднесущих колебаний. Число поднесущих частот может быть различным. Так, в стандарте 802.11а, число подканалов 12. Способ повышения скорости передачи путем деления широкополосного канала на ортогональные частотные подканалы называется ортогональным частотным разделением с мультиплексированием OFDM (Orthogonal Frequency Division Multiplexing).
В каждом канале используется фазовая, многократная фазовая или квадратурная AM (KAM-16, КАМ-64).
F – ось частот.