

Рівняння прямої в просторі, що проходить через дві точки.
Якщо на прямій у просторі відзначити дві довільні точки M1(x1,y1,z1) іM2(x2,y2,z2), то координати цих точок повинні задовольняти отриманому вище рівнянню прямої:
![]() .
.
Крім того, для точки М1можна записати:
![]() .
.
В ирішуючи
спільно ці рівняння, одержимо:
ирішуючи
спільно ці рівняння, одержимо:
![]() .
.
Це рівняння прямої, що проходить через дві точки в просторі.
Загальні рівняння прямої в просторі.
Рівняння прямої може бути розглянуте як рівняння лінії перетину двох площин.
Як було розглянуто вище, площина у векторній формі може бути задана рівнянням:
![]()
![]() + D = 0, де
+ D = 0, де
![]() – нормаль площини;
– нормаль площини;![]() –
радіус-вектор довільної точки площини.
–
радіус-вектор довільної точки площини.
Нехай у просторі задані дві площини:
![]()
![]() +D1= 0 і
+D1= 0 і![]()
![]() +D2= 0, вектори нормалі мають
координати:
+D2= 0, вектори нормалі мають
координати:![]() (A1,B1,C1),
(A1,B1,C1),![]() (A2,B2,C2);
(A2,B2,C2);![]() (x,y,z).
(x,y,z).
Тоді загальні рівняння прямої у векторній формі:


Загальні рівняння прямої в координатній формі:


Практична задача часто полягає в приведенні рівнянь прямих у загальному виді до канонічного виду.
Для цього треба знайти довільну точку прямої й числа m,n,p.
При цьому напрямний вектор прямої може бути знайдений як векторний добуток векторів нормалі до заданих площин.

Приклад.Знайти канонічне рівняння, якщо пряма задана у вигляді:

Для знаходження довільної точки прямій, приймемо її координату х= 0, а потім підставимо це значення в задану систему рівнянь.
 ,
тобтоА(0, 2, 1).
,
тобтоА(0, 2, 1).
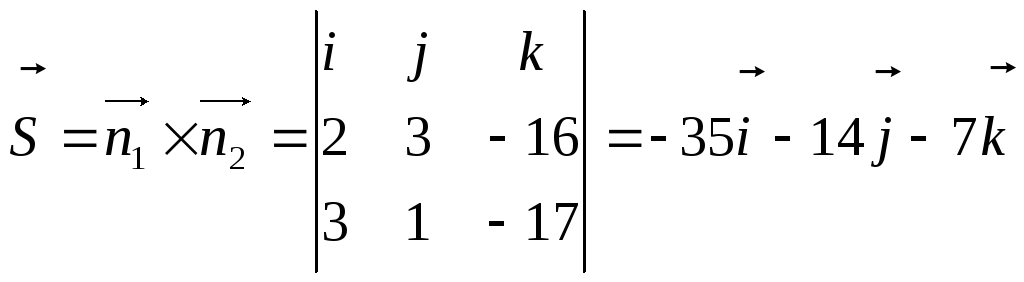
Знаходимо компоненти напрямного вектора прямої.
![]()
Тоді канонічні рівняння прямої:
![]()
Приклад.Привести до канонічного виду рівняння прямої, задане у вигляді:
Для знаходження довільної точки прямої, що є лінією перетину зазначених вище площин, приймемо z= 0. Тоді:
 ;
;
2x– 9x –7 = 0;
x= –1;y= 3;
Одержуємо: A(–1; 3; 0).
Напрямний
вектор прямої:
 .
.
Отже:
![]()
Кут між площинами.

![]()
1О
![]()
Кут між двома площинами в просторі пов'язаний з кутом між нормалями до цих площин1співвідношенням:=1або= 1800– 1, тобто cos=cos1.
Визначимо кут 1. Відомо, що площини можуть бути задані співвідношеннями:
 ,
де
,
де
![]() (A1,B1,C1),
(A1,B1,C1),![]() (A2,B2,C2). Кут між векторами
нормалі знайдемо з їхнього скалярного
добутку:
(A2,B2,C2). Кут між векторами
нормалі знайдемо з їхнього скалярного
добутку:
 .
.
Таким чином, кут між площинами знаходиться за формулою:


Вибір знака косинуса залежить від того, який кут між площинами слід знайти – гострий, або суміжний з ним тупий.
Умови паралельності й перпендикулярності
площин.
На основі отриманої вище формули для знаходження кута між площинами можна знайти умови паралельності й перпендикулярності площин.
Для того, щоб площини були перпендикулярні необхідно й достатньо, щоб косинус кута між площинами дорівнював нулю. Ця умова виконується, якщо:

![]() .
.
П лощини
паралельні, вектори нормалей колінеарні:
лощини
паралельні, вектори нормалей колінеарні:![]()
![]() .Ця умова виконується, якщо:
.Ця умова виконується, якщо:![]() .
.
Кут між прямими в просторі.
Нехай у просторі задані дві прямі. Їхні параметричні рівняння:
l1:![]()
l2:![]()
![]()
Кут між прямими і кут між напрямними векторамицих прямих пов'язані співвідношенням:=1або= 1800–1. Кут між напрямними векторами знаходиться зі скалярного добутку у такий спосіб:

 .
.
Умови паралельності й перпендикулярності
прямих у просторі.
Щоб дві прямі були паралельні необхідно й достатньо, щоб напрямні вектори цих прямих були колінеарні, тобто їх відповідні координати були пропорційні.

![]()
Щоб дві прямі були перпендикулярні необхідно й достатньо, щоб напрямні вектори цих прямих були перпендикулярні, тобто косинус кута між ними дорівнює нулю.

![]()
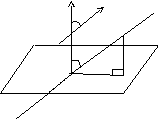
Кут між прямою й площиною.
Визначення. Кутом між прямою й площиною називається будь-який кут між прямою та її проекцією на цю площину.
![]()
![]()
Нехай площина задана рівнянням
![]() ,
а пряма –
,
а пряма –![]() .
З геометричних міркувань (див. мал.)
видно, що шуканий кут= 900–, де– кут між векторами
.
З геометричних міркувань (див. мал.)
видно, що шуканий кут= 900–, де– кут між векторами![]() й
й![]() .
Цей кут може бути знайдений за формулою:
.
Цей кут може бути знайдений за формулою:
![]()


У координатній
формі:
![]()
Умови паралельності й перпендикулярності
прямої і площині в просторі.
Для того, щоб пряма й площина були паралельні, необхідно й достатньо, щоб вектор нормалі до площини й напрямний вектор прямої були перпендикулярні. Для цього необхідно, щоб їх скалярний добуток був рівний нулю.
![]()
Для того, щоб пряма й площина були перпендикулярні, необхідно й достатньо, щоб вектор нормалі до площини й напрямний вектор прямої були колінеарні. Ця умова виконується, якщо векторний добуток цих векторів був дорівнює нулю.

![]()
Поверхні другого порядку.
Визначення.Поверхні другого порядку – це поверхні, рівняння яких у прямокутній системі координат є рівняннями другого порядку.
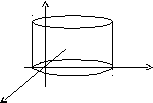
Циліндричні поверхні.
Визначення.Циліндричними поверхнями називаються поверхні, утворені лініями, паралельними до якоїсь фіксованої прямої.
Розглянемо поверхні, у рівнянні яких відсутня складова z, тобто напрямні паралельні осіОz. Тип лінії на площиніхOу(ця лінія називається напрямної поверхні) визначає характер циліндричної поверхні. Розглянемо деякі окремі випадки залежно від рівняння напрямних:
 -
еліптичний циліндр.
-
еліптичний циліндр.
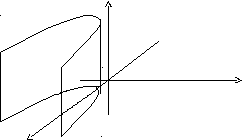
 – гіперболічний циліндр.
– гіперболічний циліндр.

x2 = 2py– параболічний циліндр.
Поверхні обертання.
Визначення.Поверхня, описана деякою лінією, що обертається навколо нерухомої прямоїd, називаєтьсяповерхнею обертання з віссю обертанняd.
Якщо рівняння поверхні в прямокутній
системі координат має вигляд:
![]() ,
то ця поверхня – поверхня обертання з
віссю обертанняОz. Аналогічно:
,
то ця поверхня – поверхня обертання з
віссю обертанняОz. Аналогічно:![]() – поверхня обертання з віссю обертанняОу,
– поверхня обертання з віссю обертанняОу,![]() – поверхня обертання з віссю обертанняОх.
– поверхня обертання з віссю обертанняОх.
Запишемо рівняння поверхонь обертання для деяких окремих випадків:
 -еліпсоїд обертання
-еліпсоїд обертання -однопорожнинний гіперболоїд обертання
-однопорожнинний гіперболоїд обертання -двопорожнинний гіперболоїд обертання
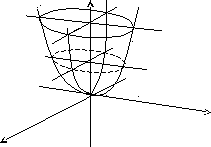
-двопорожнинний гіперболоїд обертання -параболоїд обертання
-параболоїд обертання
Аналогічно можуть бути записані рівняння для розглянутих вище поверхонь обертання, якщо осями обертання є осі Ох або Оу.
Однак, перераховані вище поверхні є всього лише окремими випадками поверхонь другого порядку загального виду, деякі типи яких розглянуті нижче:
Сфера:
![]()

Тривісний еліпсоїд:
![]()
У перетині еліпсоїда площинами, паралельними координатним площинам, виходять еліпси з різними осями.
Однопорожнинний гіперболоїд:
![]()

Двопорожнинний гіперболоїд:
![]()
Еліптичний параболоїд: ![]()
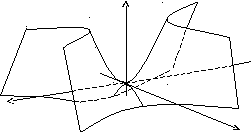
Гіперболічний параболоїд: ![]()
Конус другого порядку:
![]()

Циліндрична й сферична системи координат.
Як і на площині, у просторі положення будь-якої точки може бути визначене трьома координатами в різних системах координат, відмінних від декартової прямокутної системи. Циліндрична й сферична системи координат є узагальненням для простору полярної системи координат, що була докладно розглянута вище.
Введемо в просторі точку Ои проміньl, що виходить із точкиО, а також
вектор![]() .
Через точкуОможна провести єдину
площину, перпендикулярну вектору нормалі
.
Через точкуОможна провести єдину
площину, перпендикулярну вектору нормалі![]() .
.
Для введення відповідності між циліндричною, сферичною й декартовою прямокутною системами координат точку Осуміщають з початком декартової прямокутної системи координат, проміньl– з позитивним напрямком осіх, вектор нормалі – з віссюz.
Циліндрична й сферична системи координат використовуються в тих випадках, коли рівняння кривій або поверхні в декартовій прямокутній системі координат виглядають досить складно, і операції з таким рівнянням виглядають трудомісткими.
Подання рівнянь у циліндричній і сферичній системі дозволяє значно спростити обчислення, що буде показано далі.
z
М
h
О x
r
M1
y
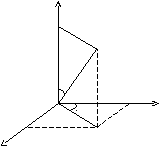
![]() ОМ1=r;MM1=h;
ОМ1=r;MM1=h;
Якщо з точки Мопустити перпендикулярММ1на площину, то точкаМ1буде мати на площині полярні координати (r,).
Визначення. Циліндричними координатами точкиМназиваються числа (r,,h), які визначають положення точкиМу просторі.
Визначення. Сферичними координатами точки М називаються числа (r,,), де– кут міжі нормаллю.