

Властивості векторів.
 +
+ =
= +
+ – комутативність.
– комутативність. + (
+ ( +
+ )
= (
)
= ( +
+ )+
)+
 +
+ =
=
 +(–1)
+(–1) =
=
()
 =(
=( ) – асоціативність
) – асоціативність(+)
 =
= +
+ – дистрибутивність
– дистрибутивність(
 +
+ )
=
)
= +
+
1
 =
=
Визначення.
1)Базисому просторі називаються будь-які 3 некомпланарні вектори, узяті в певному порядку.
2) Базисомна площині називаються будь-які 2 неколінеарні вектори, узяті в певному порядку.
3) Базисомна прямій називається будь-який ненульовий вектор.
Визначення.Якщо![]() – базис у просторі й
– базис у просторі й![]() ,
то числа,і– називаютьсякомпонентами або координатамивектора
,
то числа,і– називаютьсякомпонентами або координатамивектора![]() в цьому базисі.
в цьому базисі.
У зв'язку із цим можна записати наступні властивості:
рівні вектори мають однакові координати,
при множенні вектора на число його компонента теж множаться на це число,
![]() =
=![]() .
.
при додаванні векторів складаються їхні відповідні компоненти.
![]() ;
;![]() ;
;
![]() +
+![]() =
=![]() .
.
Лінійна залежність векторів.
Визначення.Вектори![]() називаютьсялінійно залежними,
якщо існує така лінійна комбінація
називаютьсялінійно залежними,
якщо існує така лінійна комбінація![]() ,
при не рівних нулю одночасноi, тобто
,
при не рівних нулю одночасноi, тобто![]() .
.
Якщо ж тільки
при i= 0
виконується![]() ,
то вектори називаються лінійно
незалежними.
,
то вектори називаються лінійно
незалежними.
Властивість 1.Якщо серед векторів![]() є нульовий вектор, то ці вектори лінійно
залежні.
є нульовий вектор, то ці вектори лінійно
залежні.
Властивість 2.Якщо до системи лінійно залежних векторів додати один або кілька векторів, то отримана система теж буде лінійно залежна.
Властивість 3.Система векторів лінійно залежна тоді й тільки тоді, коли один з векторів розкладається в лінійну комбінацію інших векторів.
Властивість 4.Будь-які 2 колінеарні вектори лінійно залежні й, навпаки, будь-які 2 лінійно залежні вектори колінеарні.
Властивість 5.Будь-які 3 компланарних вектори лінійно залежні й, навпаки, будь-які 3 лінійно залежні вектори компланарні.
Властивість 6.Будь-які 4 вектори лінійно залежні.
Система координат.
Для визначення положення довільної точки можуть використатися різні системи координат. Положення довільної точки в якій-небудь системі координат повинне однозначно визначатися. Поняття системи координат являє собою сукупність точки початку відліку (початку координат) і деякого базису. Як на площині, так і в просторі можливе завдання найрізноманітніших систем координат. Вибір системи координат залежить від характеру поставленої геометричної, фізичної або технічної задачі. Розглянемо деякі найбільше часто застосовувані на практиці системи координат.
Декартова система координат.
Зафіксуємо в просторі точку О и розглянемо довільну точку М.
Вектор
![]() назвемо радіус-вектором точки М. Якщо
в просторі задати деякий базис, то точці
М можна зіставити деяку трійку чисел –
компонента її радіус-вектора.
назвемо радіус-вектором точки М. Якщо
в просторі задати деякий базис, то точці
М можна зіставити деяку трійку чисел –
компонента її радіус-вектора.
Визначення.Декартовою системою координату просторі називається сукупність точки й базису. Точка називаєтьсяпочатком координат. Прямі, що проходять через початок координат називаютьсяосями координат.
1-я вісь – вісь абсцис
2-я вісь – вісь ординат
3-я вісь – вісь аплікат
Щоб знайти компоненти вектора потрібно з координат його кінця відняти координати початку.
Якщо задані
точки А(x1,y1,z1),B(x2,y2,z2),
то![]() =
(x2 –x1,y2–y1,z2–z1).
=
(x2 –x1,y2–y1,z2–z1).
Визначення.Базис називаєтьсяортонормованим, якщо його вектори попарно ортогональні й дорівнюють одиниці.
Визначення.Декартова система координат, базис якої ортонормований називаєтьсядекартовою прямокутною системою координат.
Приклад.Дано вектори![]() (1; 2; 3),
(1; 2; 3),![]() (–1;
0; 3),
(–1;
0; 3),![]() (2;
1; –1) і
(2;
1; –1) і![]() (3;
2; 2) у деякому базисі. Показати, що вектори
(3;
2; 2) у деякому базисі. Показати, що вектори![]() ,
,![]() і
і![]() утворюють
базис і знайти координати вектора
утворюють
базис і знайти координати вектора![]() в цьому базисі.
в цьому базисі.
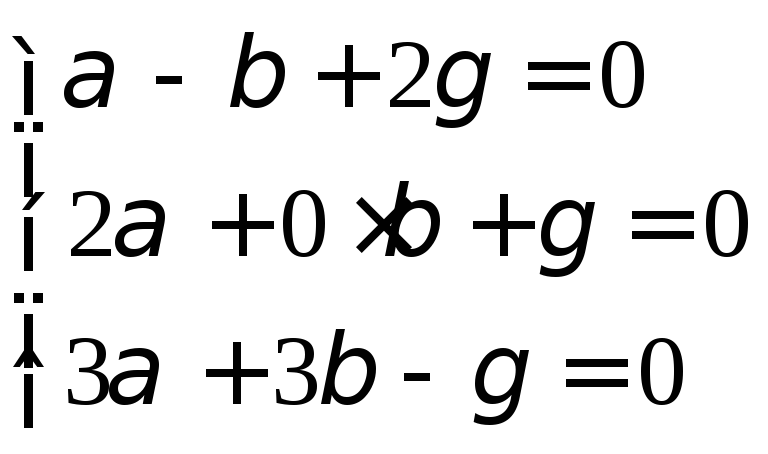
Вектори утворять базис, якщо вони лінійно незалежні, інакше кажучи, якщо рівняння, що входять у систему:
 лінійно
незалежні.
лінійно
незалежні.
Тоді
![]() .
.
Ця умова виконується, якщо визначник матриці системи відмінний від нуля.
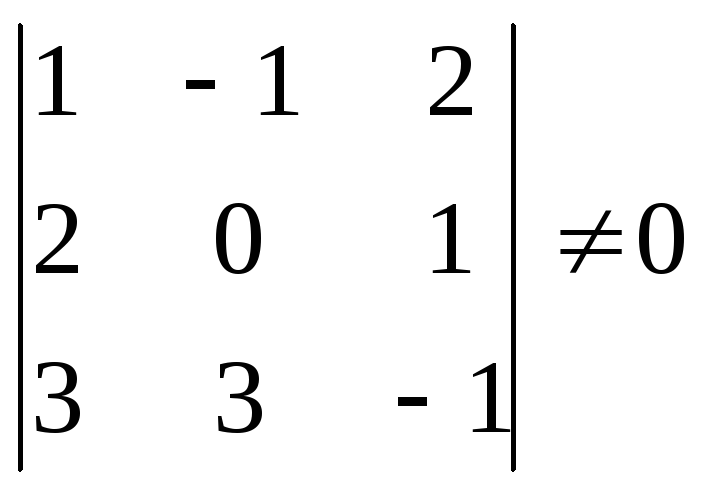
![]()
 . Для
розв’язання цієї системи скористаємося
методом Крамера.
. Для
розв’язання цієї системи скористаємося
методом Крамера.
1=
![]() ;
;
2=
![]()
3=
![]()
Разом,
координати вектора
![]() в
базисі
в
базисі![]() ,
,![]() ,
,![]() :
:![]() .□
.□
Довжина вектора в координатахвизначається як відстань між точками
початку й кінця вектора. Якщо задані
дві точки в просторіА(х1,y1,z1),B(x2,y2,z2), то![]() .
.
Якщо точка М(х,у,z)ділить відрізок АВ у співвідношенні /, то координати цієї точки визначаються як:
![]()
В окремому випадку координати середини відрізказнаходяться як:
![]()