

Теорема Кронекера-Капеллі.
(умова сумісності системи)
(Леопольд Кронекер (1823-1891) німецький математик)
Теорема: Система сумісна (має хоча б один розв’язок) тоді й тільки тоді, коли ранг матриці системи дорівнює рангу розширеної матриці.
Rank А= RankА*.
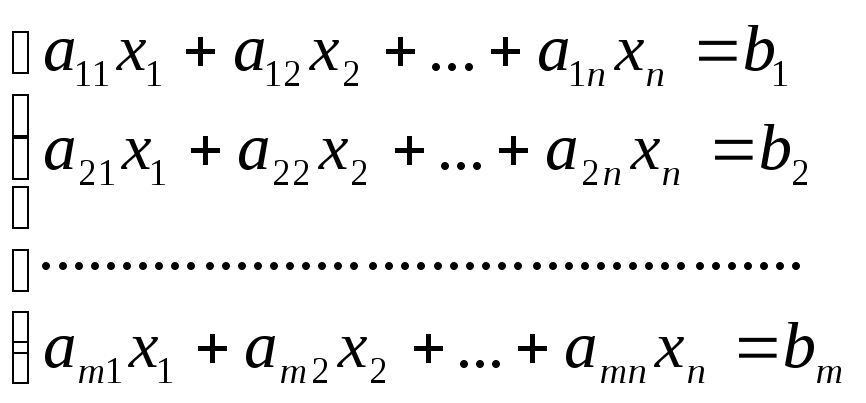
Очевидно, що система (1) може бути записана у вигляді:
x1![]() +x2
+x2![]() +
… +xn
+
… +xn
Доведення.
1) Якщо розв’язок існує, то стовпець вільних членів є лінійною комбінацією стовпців матриці А, а значить додавання цього стовпця в матрицю, тобто перехідАА*не змінює рангу.
2) Якщо Rank А= RankА*, те це означає, що вони мають той самийбазовий мінор. Стовпець вільних членів – лінійна комбінація стовпців базового мінору, тоді вірний запис, наведений вище.
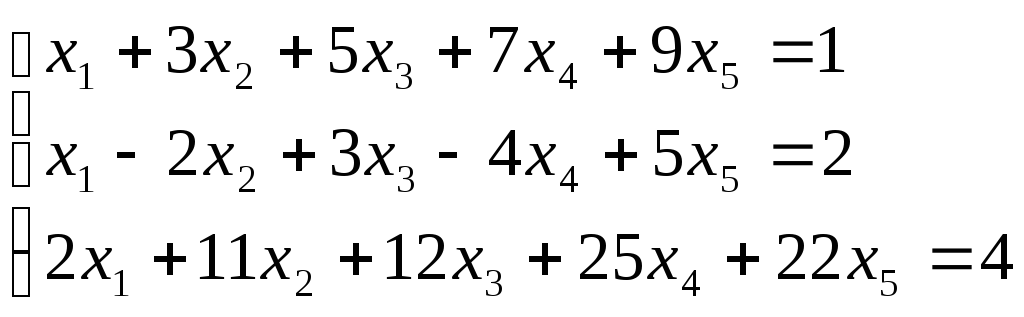
Приклад.Перевіритисумісністьлінійних рівнянь:
A=
~
![]() .
.![]() RankA= 2.
RankA= 2.
A* =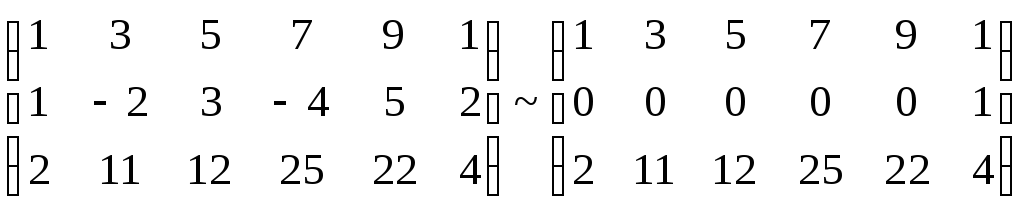 RankA* = 3.
RankA* = 3.
Система несумісна.
Приклад.Перевіритисумісністьлінійних рівнянь.
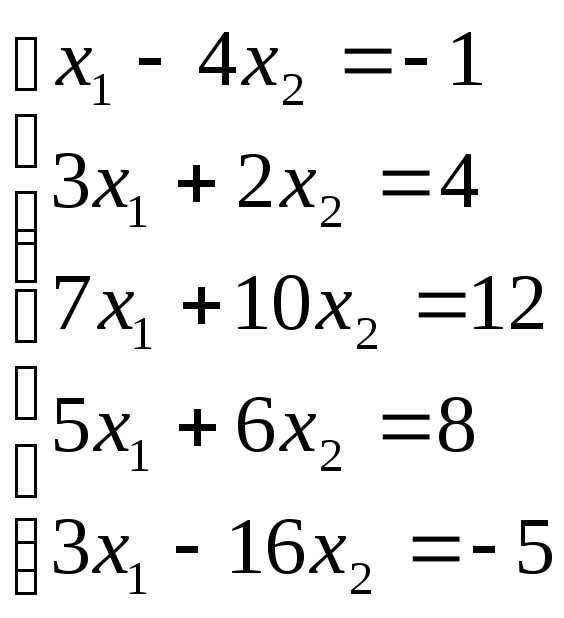 А=
А=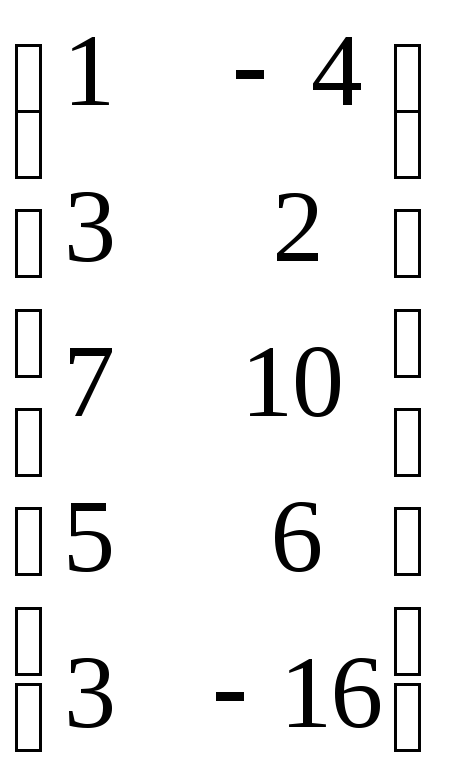 ;
;![]() = 2 + 12 = 140; RankА=
2;
= 2 + 12 = 140; RankА=
2;
A* =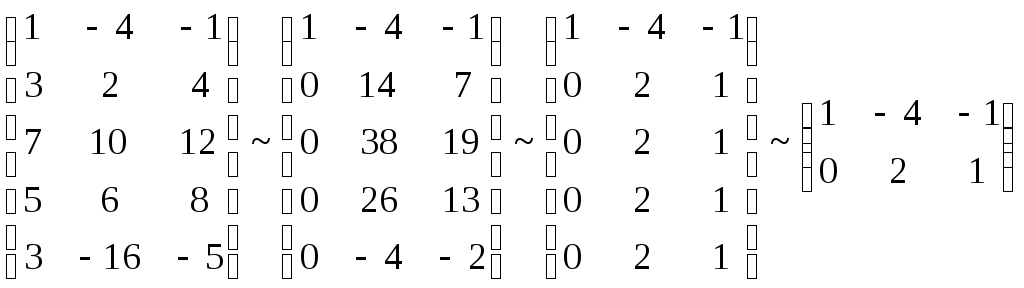
![]() RankA* = 2.
RankA* = 2.
Система сумісна. Розв’язок: x1= 1;x2=1/2.
Метод Гауса.
(Карл Фрідріх Гаус (1777-1855) німецький математик)
На відміну від матричного методуіметода Крамера, метод Гауса може бути застосований до систем лінійних рівнянь із довільним числом рівнянь і невідомих. Суть методу полягає в послідовному виключенні невідомих.
Розглянемо систему лінійних рівнянь:
Розділимо обидві частини 1-го рівняння на a110, потім:
1) помножимо на а21і віднімемо із другого рівняння
2) помножимо на а31і віднімемо із третього рівняння
і т.д.
Одержимо:
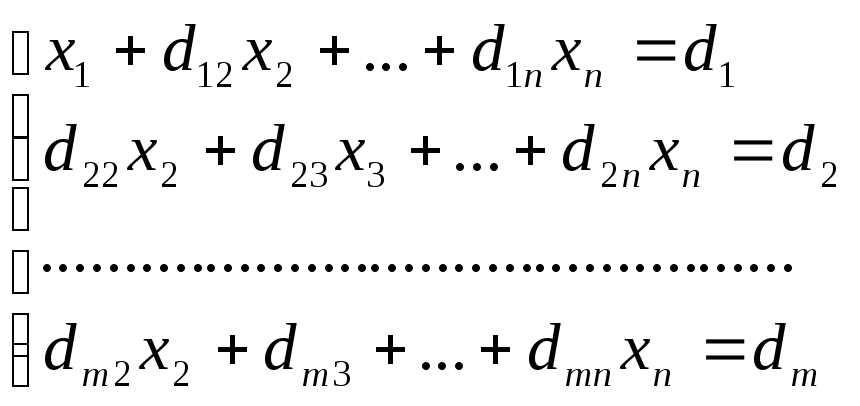 ,
деd1j = a1j/a11,
j = 2, 3, …, n+1...
,
деd1j = a1j/a11,
j = 2, 3, …, n+1...
dij = aij – ai1d1j i = 2, 3, … , n; j = 2, 3, … , n+1...
Далі повторюємо цієї ж дії для другого рівняння системи, потім - для третього й т.д.
Приклад.Вирішити систему лінійних рівнянь методом Гауса.
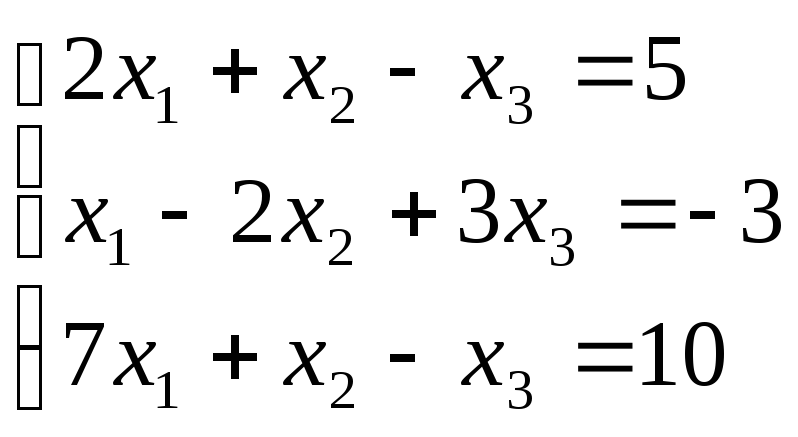
Складемо розширену матрицю системи.
А* =
Таким чином, вихідна система може бути представлена у вигляді:
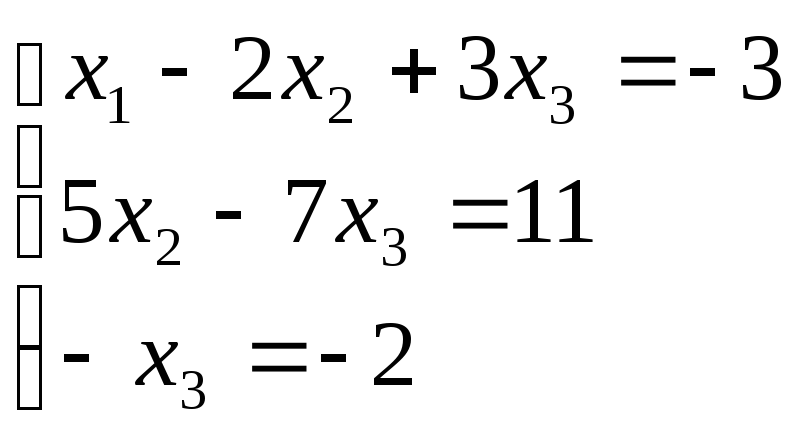 ,
звідки одержуємо:x3= 2;x2= 5;x1= 1.
,
звідки одержуємо:x3= 2;x2= 5;x1= 1.
Приклад.Вирішити систему методом Гауса.
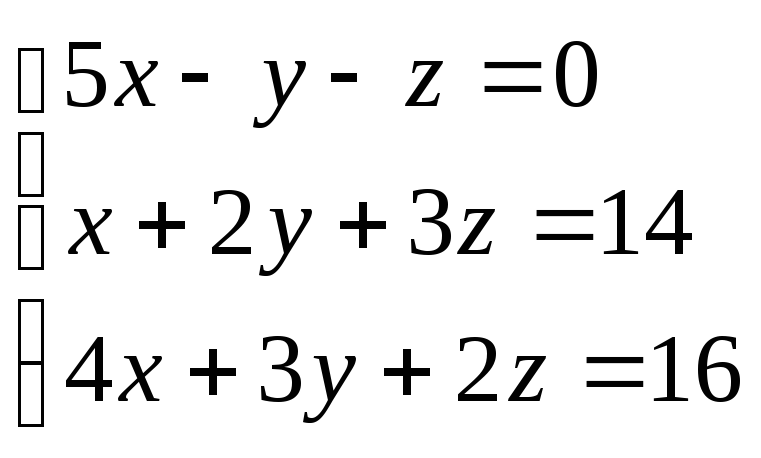
Складемо розширену матрицю системи.

Таким чином, вихідна система може бути представлена у вигляді:
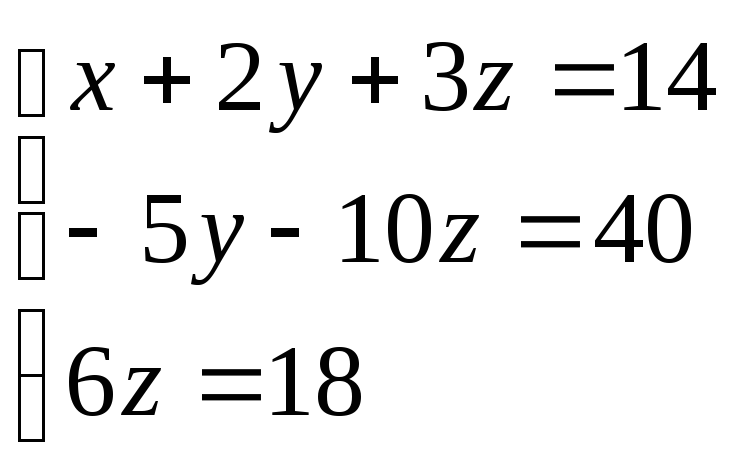 ,
звідки одержуємо:z= 3;y= 2;x= 1.
,
звідки одержуємо:z= 3;y= 2;x= 1.
Отримана відповідь збігається з відповіддю, отриманою для даної системи методом Крамера й матричним методом.
Для самостійного розв’язання:
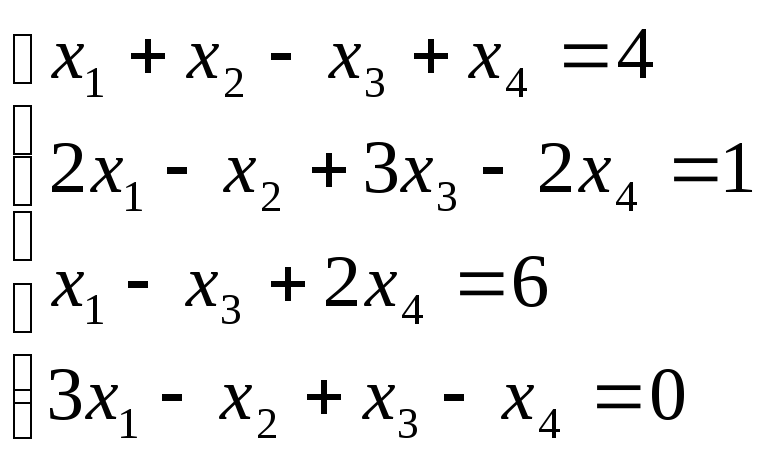 Відповідь:
{1, 2, 3, 4}.
Відповідь:
{1, 2, 3, 4}.
Елементи векторної алгебри.
Визначення.Векторомназивається прямолінійний відрізок (упорядкована пара точок). До векторів належить також інульовийвектор, початок і кінець якого збігаються.
Визначення.Довжиною (модулем)вектора називається відстань між початком і кінцем вектора.
![]()
Визначення.Вектори називаються колінеарними, якщо вони розташовані на одній або паралельних прямих. Нульовий вектор колінеарний до будь-якого вектора.
Визначення.Вектори називаютьсякомпланарними, якщо існує площина, який вони паралельні.
Колінеарні вектори завжди компланарні, але не всі компланарні вектори колінеарні.
Визначення.Вектори називаютьсярівними, якщо вони колінеарні, однаково спрямовані й мають однакові модулі.
Усякі вектори можна привести до спільного початку, тобто побудувати вектори, відповідно рівні даним, що мають загальний початок. З визначення рівності векторів треба, що будь-який вектор має нескінченно багато векторів, рівних йому.
Визначення.Лінійними операціяминад векторами називається додавання й множення на число.
Сумою векторів є вектор –
![]()
Добуток –
![]() ,
при цьому
,
при цьому![]() колінеарний до
колінеарний до![]() .
.
Вектор
![]() співнаправлений з вектором
співнаправлений з вектором![]() (
(![]()
![]() ), якщо> 0.
), якщо> 0.
Вектор
![]() протилежно спрямований до вектора
протилежно спрямований до вектора![]() (
(![]()
![]() ), якщо< 0.
), якщо< 0.