

Полярна система координат.
Визначення. Точка О називається полюсом, а промінь l – полярною віссю.
Суть задання який-небудь системи координат на площині полягає в тому, щоб кожній точці площини поставити у відповідність пару дійсних чисел, що визначають положення цієї точки на площині. У випадку полярної системи координат роль цих чисел грають відстань точки від полюса й кут між полярною віссю й радіус-вектором цієї точки. Цей кут називається полярним кутом.
М
r
r=![]()
О
l
Можна встановити зв'язок між полярною системою координат і декартовою прямокутною системою, якщо помістити початок декартової прямокутної системи в полюс, а полярну вісь направити уздовж додатного напрямку осі Ох.
Тоді координати довільної точки у двох різних системах координат зв'язуються співвідношеннями:

![]() ;
;![]() ;
;![]()
Приклад.Рівняння кривої в полярній системі координат має вигляд:
![]() .
Знайти рівняння кривої в декартовій
прямокутній системі координат, визначити
тип кривої, знайти фокуси й ексцентриситет.
Схематично побудувати криву.
.
Знайти рівняння кривої в декартовій
прямокутній системі координат, визначити
тип кривої, знайти фокуси й ексцентриситет.
Схематично побудувати криву.
Скористаємося зв'язком декартової
прямокутної й полярної системи координат:
![]() ;
;

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
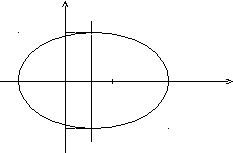
Одержали канонічне рівняння еліпса. З
рівняння видно, що центр еліпса зсунутий
вздовж осі Охна 1/2 вправо, велика
піввісь a дорівнює 3/2, менша піввісьbдорівнює![]() ,
половина відстані між фокусами дорівнює
,
половина відстані між фокусами дорівнює![]() .
Ексцентриситет дорівнюєе=с/a= 1/3. ФокусиF1(0; 0) іF2(1;
0).
.
Ексцентриситет дорівнюєе=с/a= 1/3. ФокусиF1(0; 0) іF2(1;
0).
y
![]()
F1 F2
–1 О ½ 1 2x
–![]()
Приклад.Рівняння кривої в полярній системі координат має вигляд:
![]() .
Знайти рівняння кривої в декартовій
прямокутній системі координат, визначити
тип кривої, знайти фокуси й ексцентриситет.
Схематично побудувати криву.
.
Знайти рівняння кривої в декартовій
прямокутній системі координат, визначити
тип кривої, знайти фокуси й ексцентриситет.
Схематично побудувати криву.
Підставимо в задане рівняння формули, що зв'язують полярну й декартову прямокутну системи координат.

![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
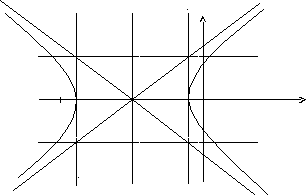
Одержали канонічне рівняння гіперболи. З рівняння видно, що гіпербола зсунута вздовж осі Охна 5 вліво, велика піввісьадорівнює 4, менша піввісьbдорівнює 3, звідки одержуємоc2=a2+b2;c= 5;e=c/a= 5/4.
Фокуси F1(–10; 0),F2(0; 0).
Побудуємо графік цієї гіперболи.
y
3
F1 –9 –5 –1О F2 x
–3
Аналітична геометрія в просторі. Рівняння лінії в просторі.
Як на площині, так і в просторі, будь-яка лінія може бути визначена як сукупність точок, координати яких у деякій обраній у просторі системі координат задовольняють рівнянню:
F(x,y,z) = 0.
Це рівняння називається рівнянням лінії в просторі.
Крім того, лінія в просторі може бути визначена й інакше. Її можна розглядати як лінію перетину двох поверхонь, кожна з яких задана яким-небудь рівнянням.
Нехай F(x,y,z) = 0 іФ(x,y,z) = 0 – рівняння поверхонь, що перетинаються по лініїL.
Тоді пари рівнянь

назвемо рівнянням лінії в просторі.
Рівняння прямої в просторі за точкою та напрямним вектором.
Візьмемо довільну пряму й вектор
![]() (m,n,p), паралельний даній прямій.
Вектор
(m,n,p), паралельний даній прямій.
Вектор![]() називаєтьсянапрямним векторомпрямої.
називаєтьсянапрямним векторомпрямої.
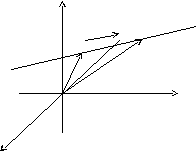
На прямій візьмемо дві довільні точки М0(x0,y0,z0) іM(x,y,z).
 z
z
![]() M1
M1
M0
![]()
![]()
Оy
x
Позначимо радіус-вектори цих точок як
![]() і
і![]() ,
мабуть, що
,
мабуть, що![]() –
–![]() =
=![]() .
.
О скільки
вектори
скільки
вектори![]() й
й![]() колінеарні, то вірне співвідношення
колінеарні, то вірне співвідношення![]() =
=![]() t,
деt– деякий параметр.
t,
деt– деякий параметр.
Разом, можна записати:
![]() =
=![]() +
+![]() t.
t.
Оскільки цьому рівнянню задовольняють координати будь-якої точки прямої, то отримане рівняння –параметричне рівняння прямої.
Це векторне рівняння може бути представлене в координатній формі:
Перетворивши цю систему й дорівнявши значення параметра t, одержуємо канонічні рівняння прямої в просторі:
![]() .
.
Визначення.Напрямними
косинусами прямої називаються напрямні
косинуси вектора![]() ,
які можуть бути обчислені за формулами:
,
які можуть бути обчислені за формулами:
![]() ;
;![]()
![]() .
.
Звідси одержимо: m:n:p= cos: cos: cos.
Числаm,n,pназиваютьсякутовими коефіцієнтамипрямої.
Оскільки![]() – ненульовий вектор, тоm,nіpне можуть дорівнювати нулю одночасно,
але одне або два із цих чисел можуть
дорівнювати нулю. У цьому випадку в
рівнянні прямої варто прирівняти до
нуля відповідні чисельники.
– ненульовий вектор, тоm,nіpне можуть дорівнювати нулю одночасно,
але одне або два із цих чисел можуть
дорівнювати нулю. У цьому випадку в
рівнянні прямої варто прирівняти до
нуля відповідні чисельники.