

Розділ 2. Задачі лінійного програмування
2.1 Попередні відомості теорії лінійного програмування.
Задача математичного програмування (1.3) або (1.4) називається задачею лінійного програмування (ЛП), якщо цільова функція f є лінійною функцією, а множина допустимих рішень Х задається лінійними нерівностями або рівняннями
min(max) f(x)=c1x1+c2x2+…+cnxn (2.1)
a11x1+a12x2+…+a1nxn ≤ b1;
a21x1+a22x2+…+a2nxn ≤ b2; (2.2)
…………………………
ak1x1+ak2x2+…+aknxn ≤ bk;
x1 ≥ 0,…, xn ≥ 0 , (2.3)
або у векторному вигляді
 (2.4)
(2.4)
де
А
= {![]() ,...,
,...,![]() };
}; ,…,
,…, ;
;![]() ;
;![]() .
.
Наведена модель є стандартною постановкою задачі ЛП, у якій в системі обмежень (2.2) можуть бути різні відношення типу “ > ”, “ > ”, “ = ”. Тут c1,…,cn – коефіцієнти при цільовій функції, a11,...,ann – коефіцієнти при змінних в системі обмежень, b1,…,bk – вільні члени системи обмежень. Усі ці компоненти задачі ЛП є відомими (заданими) числами. Невідомими (шуканими) змінними будуть елементи вектора {x1,…,xn}T. При цьому задача ЛП полягає у тому щоб знайти такі значення змінних x1*,...,xn* (точку мінімуму (максимуму)), щоб вони, по-перше задовольняли обмеження (2.2) і (2.3) (умова допустимості), а, по-друге, щоб у точці х* = (х1*,...,xn*) цільова функція f приймала мінімальне (максимальне) значення f(x*) (умова оптимальності). Аналогічно ставиться задача на мінімум.
Крім стандартної форми запису задачі ЛП є також загальна і канонічна форми запису. Загальна форма запису аналогічна стандартній за винятком того, що на значення вектору шуканих змінних {x1,…,xn}T не накладено ніяких обмежень за знаком.
У канонічній формі задач ЛП треба знайти екстремум цільової функції за системою обмежень, що описуються рівняннями та за умови невід’ємності усіх шуканих змінних:
![]() ;
;
![]() ;
;
![]() .
.
Між
формами запису задач ЛП є правила
переходу. Розглянемо правила переходу
від загальної форми до канонічної. У
системі обмежень нерівності типу
![]() перетворюються у рівності шляхом
додавання до її лівої частини додаткової
невід’ємної змінної
перетворюються у рівності шляхом
додавання до її лівої частини додаткової
невід’ємної змінної
![]() .
Так само перетворюються у рівності
нерівності типу
.
Так само перетворюються у рівності
нерівності типу
![]() шляхом віднімання від їх лівих частин
додаткової невід’ємної змінної
шляхом віднімання від їх лівих частин
додаткової невід’ємної змінної![]() .
При цьому слід зауважити, що умову
.
При цьому слід зауважити, що умову![]() легко звести до
легко звести до![]() ,
помноживши кожну нерівність на -1,
аналогічно тому як обмеження типу
,
помноживши кожну нерівність на -1,
аналогічно тому як обмеження типу![]() можна звести до обмежень типу
можна звести до обмежень типу![]() помноживши
їх на -1 та замінивши знак змінних
помноживши
їх на -1 та замінивши знак змінних![]() ,
,![]() .
Кожну змінну, на знак
якої не накладено обмежень, можна описати
як різницю двох невід’ємних змінних
.
Кожну змінну, на знак
якої не накладено обмежень, можна описати
як різницю двох невід’ємних змінних
![]() де
де![]() ,
,![]() ,
,![]() .
При цьому обмеження типу
.
При цьому обмеження типу![]() ,
де
,
де
![]() ,
можна перетворити в рівність за правилом:
,
можна перетворити в рівність за правилом:
![]() ,
де
,
де
![]() .
.
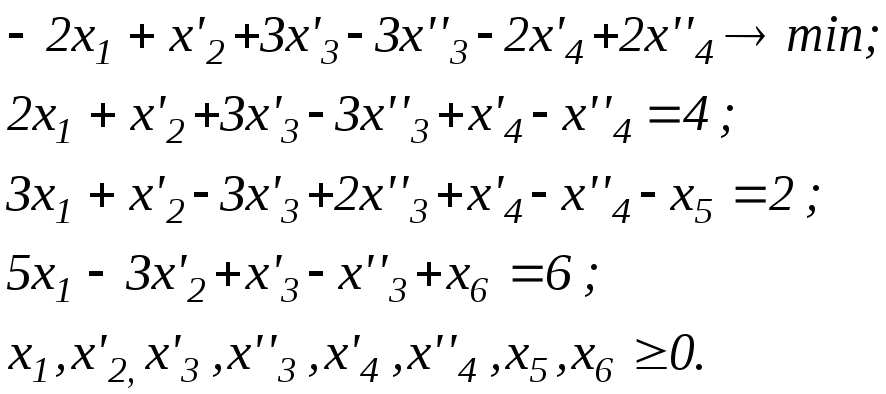
Приклад 2.1. Звести до канонічної таку загальну задачу ЛП:
Введемо додаткові змінні x5 0 та x6 0 в друге і третє обмеження-нерівності. Крім того, замінимо x'2= - x2 0, а змінні x3 та x4, що не обмежені за знаком, запишемо у вигляді x3= x'3- x''3, де x'3, x''3 0; x4= x'4- x''4, де x'4, x''4 0. Таким чином, зводимо задачу до вигляду:
Приклад 2.2. Перехід від канонічної форми запису задачі ЛП до стандартної. Структура задачі ЛП залежить від рангу r системи обмежень. Якщо r < n, то n-r змінним, які називають небазисними, можна надавати будь-які значення, при цьому r змінні, що називаються базисними, можна визначити через небазисні. Розглянемо канонічну задачу ЛП:
Ранг системи обмежень дорівнює двом. Тому за небазисні змінні виберемо, наприклад, х1 та х4. Визначимо через них базисні змінні x2 та x3:
![]() .
.
Оскільки х1 та х4 невід’ємні, то: 8+3/2x2 - x3 0; 2+5/2x2 0. При цьому цільова функція від небазисних змінних набуде такого вигляду:
10 +5x2 –3x3 max.
Запишемо тепер задачу у стандартній формі:
У
векторному вигляді задача перетворення
у канонічну форму запису буде мати такий
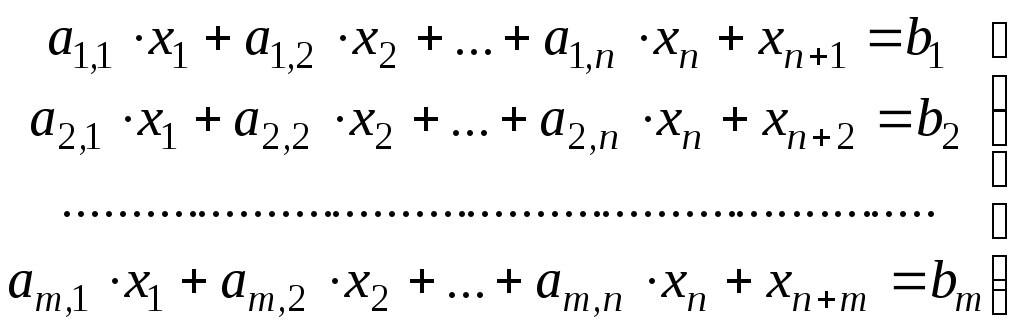
вигляд. Якщо система обмежень задана у
формі
![]() ,
то можна, увівши додаткові змінні, звести
її до вигляду
,
то можна, увівши додаткові змінні, звести
її до вигляду
![]() ,
,
![]() ,
,![]() ,
,
де
![]() .
Якщо ж обмеження задані у формі
.
Якщо ж обмеження задані у формі![]() ,
то
,
то
![]() ,
,
![]() ,
,![]() .
.
Розглянемо
тепер задачу з обмеженнями
![]() .
Цю систему обмежень можна представити
у вигляді системи
.
Цю систему обмежень можна представити
у вигляді системи
 .
.
Введемо такі позначення:
 ,
,
 ,…,
,…, ,
, ,…,
,…, ,
, ...
...
Тоді канонічну задачу ЛП можна записати у вигляді:
![]()
![]() ,
,
![]() .
.
Вектори
![]() називаються векторами умов, а сама
задача ЛП називається розширеною щодо
вихідної задачі. Нехай
називаються векторами умов, а сама
задача ЛП називається розширеною щодо
вихідної задачі. Нехай![]() і
і![]() - допустимі множини рішень вихідної і
розширеної задач відповідно. Тоді
будь-якій точці множини
- допустимі множини рішень вихідної і
розширеної задач відповідно. Тоді
будь-якій точці множини![]() відповідає єдина точка множини
відповідає єдина точка множини![]() і навпаки. У загальному випадку, допустима
множина
і навпаки. У загальному випадку, допустима
множина![]() вихідної задачі є проекцією множини
вихідної задачі є проекцією множини![]() розширеної задачі на підпростір вихідних
змінних.
розширеної задачі на підпростір вихідних
змінних.
Означення
2.1.
Набір чисел
![]() ,
що задовольняє обмеженням задачі
лінійного програмування, називається
їїпланом.
,
що задовольняє обмеженням задачі
лінійного програмування, називається
їїпланом.
Означення 2.2. Розв’язком задачі лінійного програмування називається її план, що мінімізує (або максимізує) лінійну форму.
Уведемо
поняття базисного розв’язку. З матриці
розширеної задачі
![]() виберемо
виберемо![]() лінійно незалежних векторів-стовпців,
що позначимо як матрицю
лінійно незалежних векторів-стовпців,
що позначимо як матрицю![]() ,
а через
,
а через![]() позначимо матрицю із стовпців, що
залишилися. Тоді
позначимо матрицю із стовпців, що
залишилися. Тоді![]() ,
і обмеження розширеної задачі лінійного
програмування можна записати у виді:
,
і обмеження розширеної задачі лінійного
програмування можна записати у виді:
![]() .
(2.5)
.
(2.5)
Очевидно,
що стовпці матриці
![]() утворять базис
утворять базис![]() -мірного
простору. Тому вектор
-мірного
простору. Тому вектор![]() і будь-який стовпець матриці
і будь-який стовпець матриці![]() можна представити у вигляді лінійної
комбінації стовпців матриці
можна представити у вигляді лінійної
комбінації стовпців матриці![]() .
.
Помножимо
зліва обидві частини виразу (2.5) на
матрицю
![]() ,
що є матрицею, оберненою щодо матриціВ
, і як результат отримаємо
,
що є матрицею, оберненою щодо матриціВ
, і як результат отримаємо
![]() ,
(2.6)
,
(2.6)
звідки
знайдемо вектор розв’язку
![]() :
:
![]() .
(2.7)
.
(2.7)
Для
різних значень
![]() ,
будемо отримувати різні розв’язки
,
будемо отримувати різні розв’язки![]() ,
і якщо покласти, що
,
і якщо покласти, що![]() ,
то будемо мати
,
то будемо мати
![]() .
(2.8)
.
(2.8)
Розв’язок
(2.8) називають базисним
розв’язком
системи з
![]() рівнянь з
рівнянь з![]() невідомими.
невідомими.
Якщо отриманий розв’язок містить тільки додатні компоненти, то такий розв’язок називається допустимим базисним розв’язком.
Особливість
допустимих базисних розв’язків полягає
у тому, що вони є крайніми точками
допустимої множини
![]() розширеної задачі.
розширеної задачі.
Якщо
серед компонентів
![]() немає нульових, то допустимий базисний
розв’язок називаєтьсяневиродженим.
немає нульових, то допустимий базисний
розв’язок називаєтьсяневиродженим.
Означення
2.3.
План
![]() задачі лінійного програмування будемо
називати опорним, якщо вектори умов
задачі лінійного програмування будемо
називати опорним, якщо вектори умов![]() з додатними коефіцієнтами лінійно
незалежні.
з додатними коефіцієнтами лінійно
незалежні.
Тобто опорний план – це допустимий базисний розв’язок розширеної системи і є кутовою точкою багатокутника рішень.
Означення
2.4.
Опорний план називається невиродженим,
якщо він містить
![]() додатних компонентів (по числу обмежень).
додатних компонентів (по числу обмежень).
Невироджений
опорний план утворюється перетинанням
![]() гіперплощин зn+m
гіперплощин, що утворюють допустиму
область розв’язків. У випадку виродженості
в кутовій точці багатокутника розв’язків
перетинається більше
гіперплощин зn+m
гіперплощин, що утворюють допустиму
область розв’язків. У випадку виродженості
в кутовій точці багатокутника розв’язків
перетинається більше
![]() гіперплощин.
гіперплощин.
Теорема 2.1. (Основна теорема лінійного програмування):
Лінійна форма
 досягає свого мінімуму в кутовій точці
багатокутника рішень.
досягає свого мінімуму в кутовій точці
багатокутника рішень.Якщо вона приймає мінімальне значення більше ніж в одній кутовій точці, то вона досягає того ж самого значення у будь-якій точці, що є опуклою комбінацією цих кутових точок.
Доведення. Доведення теореми засновано на такій лемі.
Лема.
Якщо
![]() – замкнена, обмежена і опукла множина,
що має скінчене число крайніх (кутових)
точок, то будь-яка точка
– замкнена, обмежена і опукла множина,
що має скінчене число крайніх (кутових)
точок, то будь-яка точка![]() може бути представлена у вигляді опуклої
комбінації крайніх точок
може бути представлена у вигляді опуклої
комбінації крайніх точок![]() .
.
1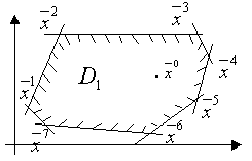 )
Нехай
)
Нехай![]() -
деяка внутрішня точка (див. на рисунку
зліва). Багатокутник обмежений, замкнений
і має скінчене число кутових точок.
-
деяка внутрішня точка (див. на рисунку
зліва). Багатокутник обмежений, замкнений
і має скінчене число кутових точок.![]() – допустима множина.
– допустима множина.
Припустимо,
що
![]() є оптимальною точкою, тобто
є оптимальною точкою, тобто![]() ,
,![]() .
Припустимо, також, що точка
.
Припустимо, також, що точка![]() не є кутовою. Тоді на підставі леми точку
не є кутовою. Тоді на підставі леми точку![]() можна визначити через кутові точки
багатокутника
можна визначити через кутові точки
багатокутника![]() ,
тобто
,
тобто![]() ,
,![]() ,
,![]() .
.
Оскільки
функція
![]() лінійна, то
лінійна, то
![]() .
(*)
.
(*)
Виберемо
серед точок
![]() ту, у якій лінійна форма
ту, у якій лінійна форма![]() приймає найменше значення. Нехай це
буде точка
приймає найменше значення. Нехай це
буде точка![]() .
Позначимо мінімальне значення функції
в кутовій точці через
.
Позначимо мінімальне значення функції
в кутовій точці через![]() :
:
![]() .
.
Підставимо
це значення в лінійну форму (*) замість![]() і отримаємо
і отримаємо
![]() .
.
Оскільки,
за припущенням,
![]() – оптимальна точка, то ми отримали
протиріччя:
– оптимальна точка, то ми отримали
протиріччя:![]() .
Отже,
.
Отже,![]() ,
,![]() - кутова точка.
- кутова точка.
2)
Припустимо, що лінійна форма
![]() приймає мінімальне значення більш ніж
в одній кутовій точці, наприклад, у
кутових точках
приймає мінімальне значення більш ніж
в одній кутовій точці, наприклад, у
кутових точках![]()
![]() .
Тоді якщо
.
Тоді якщо![]() є опуклою комбінацією цих точок, тобто
є опуклою комбінацією цих точок, тобто
![]() ,
,
![]() і
і![]()
![]() ,
,
то
 .
Тобто, якщо мінімальне значення
досягається більш ніж в одній кутовій
точці, то цього ж значення лінійна форма
досягає в будь-якій точці, що є опуклою
комбінацією цих точок
.
Тобто, якщо мінімальне значення
досягається більш ніж в одній кутовій
точці, то цього ж значення лінійна форма
досягає в будь-якій точці, що є опуклою
комбінацією цих точок
Теорема
2.2.
Якщо відомо, що система векторів умов
![]() ,
,![]() лінійно незалежна, причому така, що
лінійно незалежна, причому така, що
![]() ,
,
де
всі
![]() ,
то точка
,
то точка![]() є
кутовою точкою багатокутника розв’язків.
є
кутовою точкою багатокутника розв’язків.
Теорема
2.3.
Якщо
вектор
![]() є кутовою точкою багатокутника розв’язків,
то вектори умов, що відповідають додатним
компонентам вектора
є кутовою точкою багатокутника розв’язків,
то вектори умов, що відповідають додатним
компонентам вектора![]() ,
є лінійно незалежними. При цьому : кутова
точка багатокутника розв’язків має не
більш ніж
,
є лінійно незалежними. При цьому : кутова
точка багатокутника розв’язків має не
більш ніж![]() додатних компонентів вектору
додатних компонентів вектору![]() ;
кожній кутовій точці багатокутника
розв’язків відповідає
;
кожній кутовій точці багатокутника
розв’язків відповідає![]() лінійно незалежних векторів, що належать
системі векторів
лінійно незалежних векторів, що належать
системі векторів![]() .
.
Підсумовуючи вище описане, можна відзначити такі властивості задач лінійного програмування:
1. Допустима множина розв’язків ЛП або порожня, або є опуклим багатокутником у Rn, що є перетинанням півпросторів, які описуються нерівностями (2.2)-(2.3)). Вона може бути обмеженою, так і необмеженою; у будь-якому випадку це замкнений багатокутник.
2. Якщо допустима множина не порожня, а цільова функція обмежена зверху (для задачі максимізації, а для задачі мінімізації - обмежена знизу) на цій множині, то задача ЛП має оптимальне рішення.
3. Оптимальні розв’язки задачі ЛП (якщо вони існують) завжди знаходяться на границі припустимої множини. Точніше, якщо існує єдиний оптимальний розв’язок, то ним є одна з вершина багатокутника допустимих рішень.
4. Якщо дві або кілька вершин є оптимальними розв’язками, то будь-яка їх опукла комбінація також є оптимальним розв’язком, тобто існує нескінченна множина точок максимуму або мінімуму.
Методами розв’язання задач ЛП є графічний метод (у випадку двох змінних), або його різновиди (у загальному випадку).