

5.4 Методи оптимізації з використанням похідних
Доцільно припустити, що ефективність пошукових процедур істотно підвищиться, якщо на додаток до умови безперервності ввести вимогу диференціюємості цільової функції. Необхідна умова існування оптимуму цільової функції в точці x*
W'(x*) = d/dx x=x* = 0.
У випадку, якщо цільова функція містить члени, що включають x у третій і більш високих ступенях, то отримати аналітичний розв’язок рівняння W'(x) важко. У цих випадках доцільно використовувати чисельні методи знаходження коренів нелінійних рівнянь:
метод середньої точки;
метод хорд;
метод дотичних;
Метод середньої точки. Метод заснований на алгоритмі виключення інтервалів, на кожній ітерації якого розглядається одна спробна точка R. Якщо в точці R виконується нерівність W'(R) < 0, то внаслідок унімодальності функції точка оптимуму не може лежати лівіше точки R. Аналогічно, якщо W'(R) > 0, то інтервал x >R можна виключити.
Нехай у інтервалі [a,b] існують дві точки N і P, у яких похідні W'(N) < 0 і W'(P) > 0. Оптимальна точка x* розташована між N і P.
Крок 1. Покласти P = b, N = a, причому W'(a) < 0 і W'(b) > 0.
Крок 2. Обчислити R=(P+N)/2 і W'(R).
Крок 3. Якщо W'(R) < , то закінчити пошук. Інакше, якщо W'(R) < 0, покласти N=R, і перейти до кроку 2. Якщо ж W'(R) > , покласти P = R і перейти до кроку 2.
Як випливає з логічної структури, процедура пошуку за методом середньої точки заснована на дослідженні тільки знаку похідної.
Приклад 5.6. Мінімізувати W(x)=2x2+(16/x) на інтервалі 1 x 5.
W'(x) = d(x)/dx = 4x - 16/x2.
Ітерація 1.
Крок 1. N = 1, P = 5, W'(5) =19.36, W'(1) = -12.
Крок 2. R = (5+1)/2=3.
Крок 3. W'(3) = 10.22 > 0; покласти P = 3.
Ітерація 2.
Крок 2. R = (3+1)/2 = 2.
Крок 3. W'(2) = 4 > 0; покласти P = 2.
Ітерації продовжуються доти, поки не буде виконуватися нерівність
W'(R),
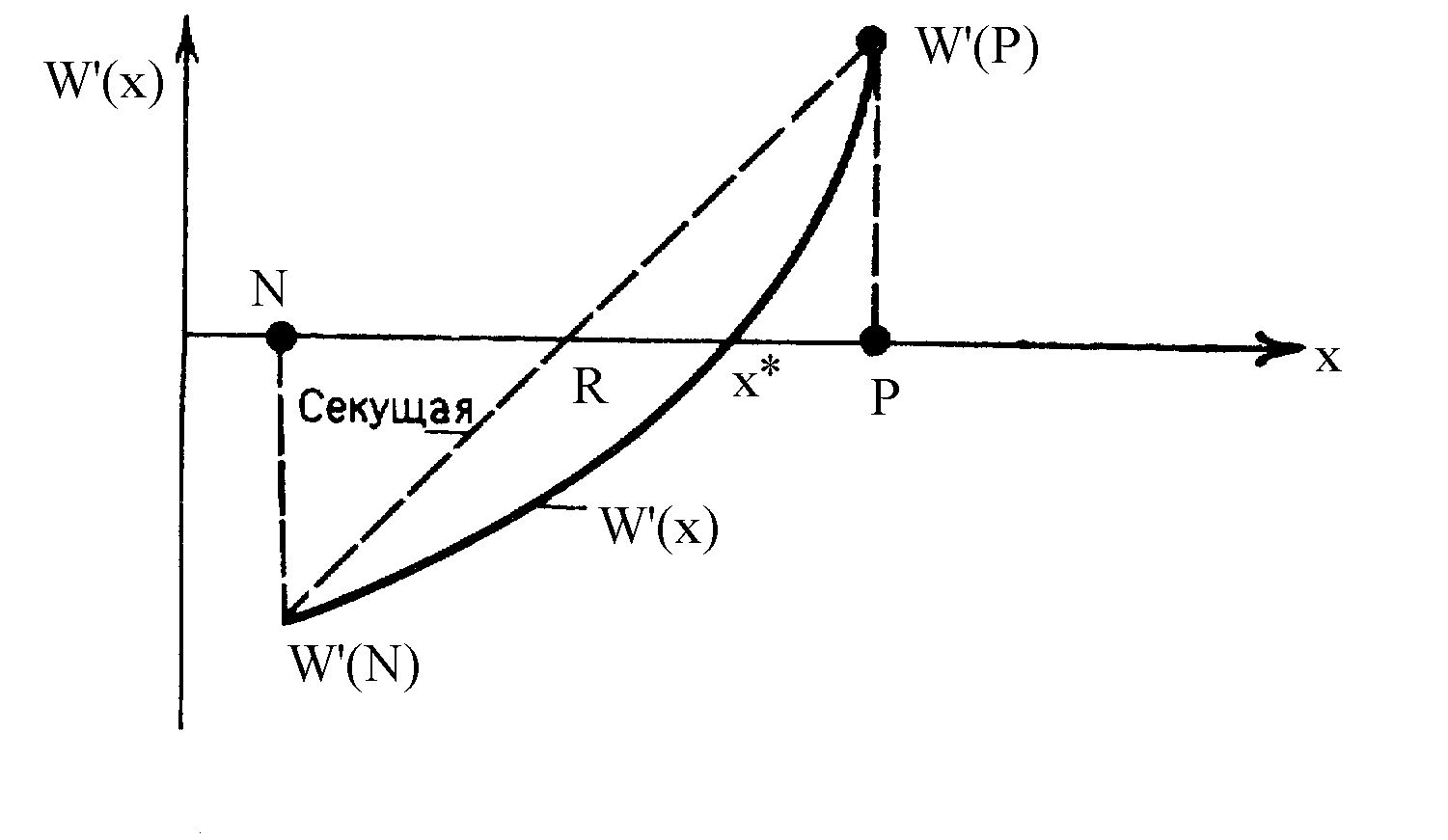
Метод хорд. Метод орієнтований на пошуку кореня рівняння W'(x) в інтервалі [a,b], у якому існують дві точки N і P, у яких знаки похідних різні. Алгоритм методу хорд дозволяє апроксимувати функцію W'(x) "хордою" і знайти точку, у якій січна графіку W'(x) перетинає вісь абсцис (див. на рисунку нижче).
Крок
1.
Наступне наближення до стаціонарної
точки x*
визначається за формулою
![]() .
.
Крок 2. Обчислити W'(R).
Крок 3. Якщо W'(R) < , то закінчити пошук. Інакше необхідно вибрати одну з точок P або N, щоб знаки похідних у цій точці і точці R були різні. Повернутися до кроку 1.
Як видно з алгоритму, метод хорд реалізований на дослідженні як знаку похідної, так і її значення. Тому цей метод ефективніший, ніж метод середньої точки.
Приклад 5.7. Мінімізувати W(x)=2x2+(16/x) в інтервалі 1 x 5.
W'(x) = d(x)/dx = 4x - 16/x2.
Ітерація 1.
Крок 1. N=1, P =5, W'(5)=19.36, W'(1) = -12.
Крок 2. R =5-{19.36/[(19.36+12)/4]}=2.53.
Крок 3. W'(2.53) = 7.62 > 0; покласти R = 2.53.
Ітерація 2.
Крок 2. R=2.53-{7.62/[(7.62+12)/1.53]}=1.94.
Крок 3. W'(1.94)=3.51>0; покласти R=1.94.
Ітерації продовжуються поки не буде виконуватись умова W'(R)
Метод дотичних. Метод орієнтований на пошуку кореня рівняння W'(x) в інтервалі [a,b], у якому існують дві точки N і P, у яких знаки похідних різні. Робота алгоритму починається з точки xo, що представляє початкове наближення кореня рівняння W'(x)=0. Далі будується лінійна апроксимація функції W'(x) у точці x1, і точка, у якій апроксимуюча лінійна функція обертається в нуль, приймається як наступне наближення (див. на рисунку нижче). Якщо точка xk прийнята як поточне наближення до оптимальної точки, то лінійна функція, що апроксимує функцію W'(x) у точці xk, записується як W'(x, xk) = W'(xk) + W''(xk)(x - xk). Прирівнявши праву частину рівняння до нуля, одержимо наступне наближення до шуканої точки.

Крок 1. Наступне наближення до стаціонарної точки x* визначається по формулі xk+1 = xk - [W'(xk)/W''(xk)].
Крок 2. Обчислити W'(xk+1), W''(xk+1)
Крок 3. Якщо W'(xk+1) < , то закінчити пошук. Інакше необхідно повернутися до кроку 1.
Як видно з алгоритму, цільова функція W(x) повинна бути двічі диференційованою.
Приклад 5.8. Мінімізувати W(x)=2x2+(16/x), поклавши x1=1.
W'(x) = d(x)/dx = 4x - 16/x2, W"(x)= 4+(32/x3).
Ітерація 1. x1=1, W'(1)=-12, W"(1)=36, x2=1-(-12/36)=1.33
Ітерація 2. x2=1.33, W'(1.33)=-3.73, W"(1.33)=17.6,
x3 =1.33-(-3.76/17.6)=1.54
Ітерації продовжуються поки не буде виконуватись умова W'(xk).