

6.3. Метод Франка – Вулфа розв’язання задач квадратичного програмування (зкп)
У матричній формі ЗКП можна записати у вигляді
![]()
де D - симетрична, від’ємно визначена квадратна матриця коефіцеєнтів квадратичної форми.
Як відомо, із умов теореми Куна-Таккера випливає, що вектор X* буде розв'язком ЗКП тоді й тільки тоді, коли існують такі m-вимірні вектори 0 та W 0 і n-вимірний вектор V=0, за яких виконуються умови:
C+DX–A+V=0; b–AX–W=0; VTX=0; WT=0.
Дві останні умови нелінійні (умови доповняльної нежорсткості). З них випливає, що меншою мірою n змінних з Х та V , а також m змінних з та W мають обертатися у нуль. Звідси випливає, що для знаходження розв'язку ЗКП з від’ємно визначеною квадратичною формою досить розв’язати систему рівнянь і задовольнити умови доповняльної нежорсткості.
Використовуючи метод штучного базису, формулюємо задачу:
Якщо у результаті її розв'язання вдалось вивести з базису усі штучні змінні і виконати умови доповняльної нежорсткості, то знайдений базисний розв'язок буде розв'язком ЗКП. Розглянемо метод Франка - Вулфа.
Переформулюємо задачу: серед довільних базисних розв'язків системи знайти такий, який обертає у нуль VTX+W. Розглянемо вектор
Z=(x1,…,xn, 1,…,m, v1,…,vn, w1,…,wm)
та
вектор
![]() =(v1,…,vn,
w1,…,wm,
x1,…,xn,
1,…,m).
=(v1,…,vn,
w1,…,wm,
x1,…,xn,
1,…,m).
Тоді
VTX+WT
=![]() ZT
ZT![]()
min,
min,
BZ=d,
Z 0.
де
Виконуємо ряд ітерацій так, щоб опукла функція T(Z) = ZTZ мінімізувалася за таким рекурентним правилом: у результаті к-го кроку маємо довільний розв'язок Zk, що відповідає системі обмежень задачі, а також довільний розв'язок k, який задовольняє тим самим обмеженням, але не обов'язково буде базисним. Йому відповідає додатне значення T(Z) (на першому кроці ). Починаючи з базисного розв'язку Zk , мінімізуємо лінійну відносно Z форму (Zk )T . Маємо послідовність базисних розв'язків Z0=Zk, Z1, Z2 , ... , причому (Z0)T > (Z1)T . Обчислення закінчується, якщо
а)
(Zh)T![]() h
=0;
h
=0;
б)
(Zh)Tk
![]() (k)T
(k)T![]() k.
k.
У випадку а) Zk - розв’язок ЗКП, а у випадку б) знаходимо
Zk+1=Zk; k+1=k+(Zk+1–k),
=min![]()
На кожному кроці маємо або а) або б) однак через певну кількість кроків будемо мати тільки а).
Приклад 6.3. Розв’язати ЗКП методом Франка – Вульфа:
10x1+20x2–2x12–2x22+x1x2 max,
x1+x2 10,
x2 4,
x1 0, x2 0.
Матриця D має вигляд
D
=
Оскільки знаки її мінорів змінюються спочатку “ - ” потім “ +” то згідно з критерієм Сильвестра цільова функція буде угнутою.
Запишемо функцію Лагранжа квадратичної задачі
L(X,)=10x1+20x2–2x12–2x22+x1x2+1(10–x1–x2)+2(4–x2).
Умови теореми Куна – Таккера мають вигляд:
1. 2.
![]() =
10– 4x1+
x2–
1
0 ;
=
10– 4x1+
x2–
1
0 ;
![]() x1
= x1
(10– 4x1+
x2–
1)
= 0 ;
x1
= x1
(10– 4x1+
x2–
1)
= 0 ;
![]() =
20– 4x2–
1–
2
0;
=
20– 4x2–
1–
2
0;
![]() x2
= x2
(20– 4x2–
1–
2
) = 0;
x2
= x2
(20– 4x2–
1–
2
) = 0;
![]() =
10 – x1–
x2
0;
=
10 – x1–
x2
0; ![]() 1
= 1
(10– x1–
x2
) = 0;
1
= 1
(10– x1–
x2
) = 0;
![]() = 4 – x2
0;
= 4 – x2
0; ![]() 2
= 2
(4– x2
) = 0 .
2
= 2
(4– x2
) = 0 .
Треба знайти такий розв’язок системи умов 1, який одночасно задовольнив би і систему 2. Перепишемо систему 1 у вигляді:
4x1–x2+1 10 ,
–x1+4x2+1+2 20 ,
x1+x2 10,
x2 4 .
Вводячи у цю систему обмежень невід’ємні додаткові змінні V1, V2, W!, W2 дістаємо
4x1– x2+ 1– V1 = 10 ,
–x1+ 4x2+1+ 2– V2 = 20 ,
x1+ x2 + W1 = 10,
x2 + W2 = 4 .
При цьому мають виконуватись умови доповняльної нежорстокості
x1V1 = 0, x2V2 = 0, 1W1 = 0, 2W2 = 0.
Запишемо вектор Z = (z1 , z2 , z3 , z4 , z5 , z6 , z7 , z8), як
Z=(x1,x2, 1, 2, v1, v2, W1, W2)
та
вектор
![]() у вигляді
у вигляді
![]() .
.
Далі
запишемо
VTX+WT=ZT![]() /2.
/2.
Тепер задачу можна зобразити у вигляді
ZT![]() min
;
min
;
BZ = d ;
Z 0 ,
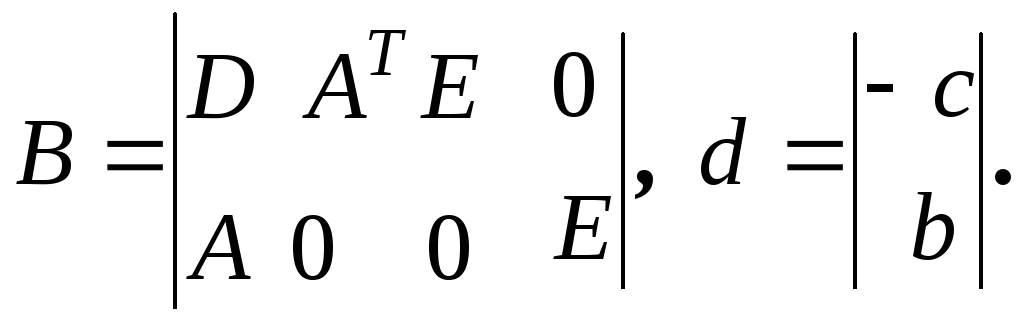
де



 4
–1 1 0 –1 0 0 0 10
4
–1 1 0 –1 0 0 0 10
B = –1 4 1 1 0 –1 0 0 , d = 20 .
1 1 0 0 0 0 1 0 10
0 1 0 0 0 0 0 1 4
Для знаходження довільного базисного розв’язку використаємо метод штучних змінних. Введемо в систему обмежень штучну змінну U1=Zg і запишемо цільову функцію L’ =Mzg min і початкову симплекс-таблицю у вигляді табл. 6.1.
Таблиця 6.1
|
i |
Б |
С |
Z1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
z1 |
z2 |
z3 |
z4 |
z5 |
z6 |
Z7 |
z8 | ||||
|
1 |
z9 |
M |
10 |
4 |
-1 |
1 |
0 |
-1 |
0 |
0 |
0 |
|
2 |
z4 |
0 |
20 |
-1 |
4 |
1 |
1 |
0 |
-1 |
0 |
0 |
|
3 |
z7 |
0 |
10 |
1 |
1 |
0 |
0 |
0 |
0 |
1 |
0 |
|
4 |
z8 |
0 |
4 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
|
m+2 |
|
|
10 |
4 |
-1 |
1 |
0 |
-1 |
0 |
0 |
0 |
Зробимо крок симплексних перетворень і дістанемо табл. 6.2.
Таблиця 6.2
|
i |
Б |
С |
Z2 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
z1 |
z2 |
z3 |
z4 |
z5 |
z6 |
z7 |
z8 | ||||
|
1 |
z1 |
0 |
5/2 |
1 |
-1/4 |
1/4 |
0 |
-1/4 |
0 |
0 |
0 |
|
2 |
z4 |
0 |
45/2 |
0 |
15/4 |
5/4 |
1 |
-1/4 |
-1 |
0 |
0 |
|
3 |
z7 |
0 |
15/2 |
0 |
5/4 |
0 |
0 |
1/4 |
0 |
1 |
0 |
|
4 |
z8 |
0 |
4 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
|
m+2 |
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Для перeвірки умов доповняльної нежорстокості розглянемо вектори
Z2
=
![]()
![]() =
=![]()
Оскільки (Z2)TZ2 0 то разом з табл. 6.2 знайшли довільний розв’язок Z0=Z0. Починаючи з нього мінімізуємо лінійну щодо Z функцію:
![]()
Табл. 6.3 випливає безпосередньо з табл. 6.2.
Таблиця 6.3
|
I |
Б |
С |
Z1 |
0 |
0 |
15/2 |
4 |
5/2 |
0 |
0 |
45/2 |
|
z1 |
z2 |
z3 |
z4 |
z5 |
z6 |
z7 |
z8 | ||||
|
1 |
z1 |
0 |
5/2 |
1 |
-1/4 |
1/4 |
0 |
-1/4 |
0 |
0 |
0 |
|
2 |
z4 |
4 |
45/2 |
0 |
15/4 |
5/4 |
1 |
-1/4 |
-1 |
0 |
0 |
|
3 |
z7 |
0 |
15/2 |
0 |
5/4 |
0 |
0 |
1/4 |
0 |
1 |
0 |
|
4 |
z8 |
45/2 |
4 |
0 |
1 |
0 |
0 |
0 |
0 |
0 |
1 |
|
m+1 |
|
|
i |
Б |
С |
Z0 |
0 |
-7/2 |
-4 |
0 |
0 |
Вибравши другий стовпець і четвертий рядок ведучими, робимо крок симплексного виключення і переходимо до нової таблиці 6.4
Таблиця 6.4
|
I |
Б |
С |
Z1 |
0 |
0 |
15/2 |
4 |
5/2 |
0 |
0 |
45/2 |
|
z1 |
z2 |
z3 |
z4 |
z5 |
Z6 |
Z7 |
z8 | ||||
|
1 |
z1 |
0 |
7/2 |
|
|
|
|
|
|
|
|
|
2 |
z4 |
4 |
15/2 |
|
|
|
|
|
|
|
|
|
3 |
z7 |
0 |
5/2 |
|
|
|
|
|
|
|
|
|
4 |
z2 |
0 |
4 |
|
|
|
|
|
|
|
|
|
m+1 |
|
|
30 |
|
|
|
|
|
|
|
|
Оскільки
![]() то перевіряємо умови доповняльної не
жорсткості
то перевіряємо умови доповняльної не
жорсткості
![]() =
=
![]()
![]() =
=![]()
Вони виконуються оскільки (Z1)TZ1 = 0. Таким чином знайдемо оптимальний розв’язок ЗКП
X*
=
 ;
;
F(X*) = 62,5 .