

Угловая скорость вращения колеса
![]()
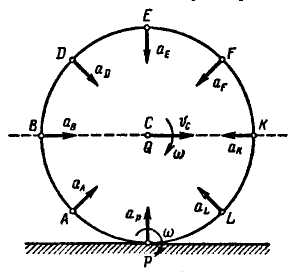
Рис. 12.12
Центр
колеса движется равномерно по прямой;
следовательно, его ускорение
![]() т.е. центр колеса является мгновенным
центром ускорений.
т.е. центр колеса является мгновенным
центром ускорений.
Так как колесо вращается равномерно, то ускорения всех точек колеса равны центростремительным ускорениям этих точек в их вращательном движении вокруг мгновенного центра ускорения. Например, ускорения точек обода определяются так:
![]()
Ускорение
каждой точки колеса направлено к
мгновенному центру ускорений. В
рассмотренном примере наглядно видно,
что мгновенный центр скоростей Р
и мгновенный центр ускорений
Q
являются различными точками плоской
фигуры. Мгновенный центр скоростей, не
имея в данный момент скорости, имеет
ускорение
![]() ,
а мгновенный центр ускорений, не имея
в данный момент ускорения, имеет скорость
.
,
а мгновенный центр ускорений, не имея
в данный момент ускорения, имеет скорость
.
С
л у ч а й
II.
Известны
модуль и направление ускорения какой-либо
точки А плоской фигуры
![]() ,
а также
угловая скорость
,
а также
угловая скорость
![]() и угловое ускорение
и угловое ускорение
![]() фигуры.
фигуры.
Определим положение мгновенного центра ускорений в частных случаях, зависящих от значений и .
1.
Неравномерное
вращение:
![]() .
В этом
случае мгновенный центр ускорений
находится на отрезке, составляющем с
направлением ускорения
.
В этом
случае мгновенный центр ускорений
находится на отрезке, составляющем с
направлением ускорения
![]() угол
угол
![]() ,
который отложен от ускорения точки в
сторону
на расстоянии от точки А,
равном
,
который отложен от ускорения точки в
сторону
на расстоянии от точки А,
равном
![]() .
.
На рис. 12.13 показан случай ускоренного вращения плоской фигуры, а на рис. 12.14 — случай замедленного вращения.
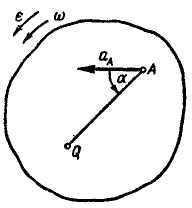
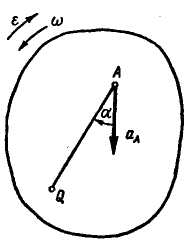
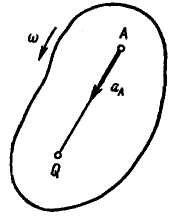
Рис. 12.13 Рис. 12.14 Рис. 12.15
Ускорение
любой другой точки плоской фигуры можно
определить по формуле
(12.4). Как
видно, направление вращения на построение
угла
![]() не влияет
и угол
всегда откладывается от направления
ускорения в сторону
не влияет
и угол
всегда откладывается от направления
ускорения в сторону
![]() .
.
2.
Равномерное
вращение:
![]() (также момент, когда
(также момент, когда
![]() при неравномерном вращении) (рис.
12.15). В этом
случае
при неравномерном вращении) (рис.
12.15). В этом
случае
![]() и
и
![]()
т. е. ускорения всех точек направлены к мгновенному центру ускорений. Расстояние от точки до мгновенного центра ускорений определяется по формуле:
![]() (12.6)
(12.6)
3.
Момент,
когда угловая скорость становится
равна нулю:
![]() .
В этом случае
.
В этом случае
![]()
т.е. ускорения всех точек направлены перпендикулярно отрезкам, соединяющим эти точки с мгновенным центром ускорений (рис. 12.16). Расстояние от точки до мгновенного центра ускорений определяется по формуле
![]() (12.7)
(12.7)

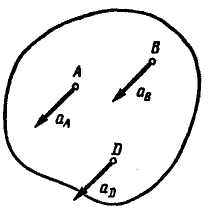
Рис. 12.16 Рис. 12.17
Угловая скорость фигуры обычно обращается в нуль при изменении направления вращения фигуры.
4.
Момент,
когда угловая скорость и угловое
ускорение становятся равными нулю
при непоступательном движении:
![]() .
В этом случае ускорения всех точек
плоской фигуры в данный момент
геометрически равны, так как ускорение
любой точки равно ускорению полюса
(рис.
12.17) по
формулам
:
.
В этом случае ускорения всех точек
плоской фигуры в данный момент
геометрически равны, так как ускорение
любой точки равно ускорению полюса
(рис.
12.17) по
формулам
:
![]() .
.
С
л у ч а й
III.
Известны
модули и
направления ускорений двух точек
плоской
фигуры.
Допустим, что известны ускорения точек
А
и В
плоской фигуры
и
![]() (рис. 12.18).
(рис. 12.18).
Примем точку А за полюс, тогда
![]()
Построим
при точке
В
параллелограмм ускорений по заданной
диагонали
![]() и одной из сторон
и одной из сторон
![]() .
Другая сторона параллелограмма определит
ускорение
.
Другая сторона параллелограмма определит
ускорение
![]() во вращении точки В
фигуры вокруг полюса А.
Ускорение
составляет угол
во вращении точки В
фигуры вокруг полюса А.
Ускорение
составляет угол
![]() с отрезком АВ,
соединяющим
точку В
с полюсом А.
с отрезком АВ,
соединяющим
точку В
с полюсом А.
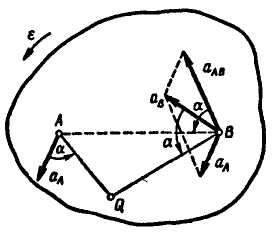
Рис. 12.18
Отсчитывая полученный угол α от ускорения к отрезку АВ, получаем направление , в данном случае противоположное направлению вращения часовой стрелки. Определив угол α и направление , отложим этот угол от ускорений точек А и В по направлению . Две полученные полупрямые продолжим до пересечения в точке Q, которая и будет мгновенным центром ускорений.
Этот способ определения положения мгновенного центра ускорений не требует определения угла α путем вычислений. Если положение мгновенного центра ускорений по этому способу определяется графически, то ускорения точек должны быть отложены в масштабе по их истинным направлениям.
Рассмотрим случаи, когда ускорения точек плоской фигуры параллельны. Положение мгновенного центра ускорений в этом случае определяется на основании того, что:
1) модули ускорений точек пропорциональны длинам отрезков, соединяющих точки с мгновенным центром ускорений:
![]() .
.
2) ускорения точек составляют с отрезками, соединяющими точки с мгновенным центром ускорений, один и тот же угол .
На
рис.
12.19 и
12.20 выполнено
построение для случая
![]() ,
т. е.
,
т. е.
![]() .
.
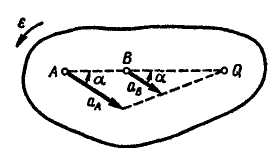

Рис. 12.19 Рис. 12.20
Рис. 12.21 и 12.22 соответствуют случаю α=90о:
![]() .
.
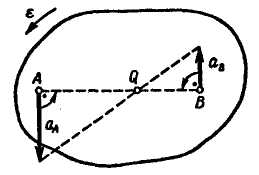
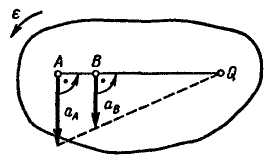
Рис. 12.21 Рис. 12.22
На рис. 12.23 и рис. 12.24 построен мгновенный центр ускорений для случая
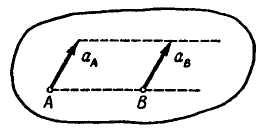
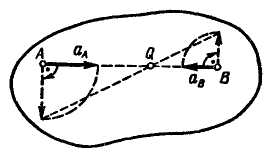
Рис. 12.23 Рис. 12.24
![]() .
.
В
случае
![]() (рис.
12.23)
мгновенный центр ускорений находится
в бесконечности, а ускорения всех точек
плоской фигуры геометрически равны.
(рис.
12.23)
мгновенный центр ускорений находится
в бесконечности, а ускорения всех точек
плоской фигуры геометрически равны.