

На этом основании
![]()
В этом заключается первое следствие теоремы об ускорениях точек плоской фигуры.
Проекции ускорений на ось, направленную из полюса, могут иметь знаки плюс и минус.
Из
следствия вытекает, что алгебраическая
величина проекции
![]() меньше
меньше
![]() ,
а абсолютное значение
,
а абсолютное значение
![]() может и превышать
может и превышать
![]() при большом центростремительном
ускорении
.
Проекции ускорений точки А
и полюса О
на ось х
равны в том случае, если
при большом центростремительном
ускорении
.
Проекции ускорений точки А
и полюса О
на ось х
равны в том случае, если
![]() т. е. при
т. е. при
![]()
Проведем
через конец ускорения полюса
![]() ,
отложенного в точке А,
прямую, перпендикулярную оси х.
Эта прямая представляет собой годограф
возможных ускорений точки плоской
фигуры при
,
отложенного в точке А,
прямую, перпендикулярную оси х.
Эта прямая представляет собой годограф
возможных ускорений точки плоской
фигуры при
![]() т. е. при
,
и является границей, за которую не могут
выходить концы возможных ускорений
точки А. Действительно, если
то конец ускорения
обязательно находится на этой прямой,
а если
т. е. при
,
и является границей, за которую не могут
выходить концы возможных ускорений
точки А. Действительно, если
то конец ускорения
обязательно находится на этой прямой,
а если
![]() ,
то конец ускорения
,
то конец ускорения
![]() находится с той стороны этой прямой,
где расположен полюс.
находится с той стороны этой прямой,
где расположен полюс.
Следствие 2. Концы ускорений точек неизменяемого отрезка лежат на одной прямой и делят эту прямую на части, пропорциональные расстояниям между этими точками.
Зная
ускорение
точки А
отрезка АВ,
алгебраические величины угловой скорости
![]() и углового ускорения
и углового ускорения
![]() ,
определим ускорение точки В
отрезка, приняв точку А
за полюс:
,
определим ускорение точки В
отрезка, приняв точку А
за полюс:
![]() .
.

Рис. 11.11
Построим
в точке В
ускорение полюса
(рис. 11.11).
Положим, что отрезок вращается ускоренно
в направлении, обратном направлению
вращения часовой стрелки. Из конца
ускорения
отложим ускорение
![]() под углом
под углом
![]() к
отрезку A1b,
равному и параллельному отрезку АВ.
Соединив точку В
с концом
,
получаем ускорение точки В.
к
отрезку A1b,
равному и параллельному отрезку АВ.
Соединив точку В
с концом
,
получаем ускорение точки В.
Для определения ускорения какой-либо другой точки отрезка, например точки D, выполним аналогичное построение.
Очевидно,
что ускорение
![]() составляет
с отрезком А1b
тот же угол β.
составляет
с отрезком А1b
тот же угол β.
Ускорения точек В и D отрезка в его вращательном движении вокруг полюса А пропорциональны расстояниям от этих точек до полюса. Действительно,
![]()
Поэтому dD1/bB1= AD/AB, но AD=A1d и АВ=А1b, как противоположные стороны параллелограммов. Тогда
![]() .
.
Таким
образом,
![]() .
Из подобия
треугольников следует, что:
.
Из подобия
треугольников следует, что:
Концы ускорений - точки a1, d1 и В1 - лежат на oдной прямой;
![]()
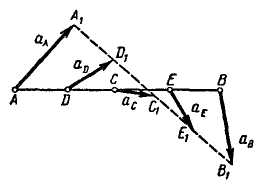
Рис. 11.12
Последнее соотношение показывает, что концы ускорений точек неизменяемого отрезка делят прямую, соединяющую эти концы, на части, пропорциональные расстояниям между соответствующими точками.
Поэтому,
зная ускорения
и
![]() концов отрезка АВ,
можно определить графически ускорения
любой точки этого отрезка.
концов отрезка АВ,
можно определить графически ускорения
любой точки этого отрезка.
Допустим,
что требуется определить ускорение
точек D,
С и
Е, делящих
отрезок на четыре равные части (рис.
11.12).
Соединяем концы ускорений точек А
и
В, отложенных
в масштабе, отрезком прямой А1В1
и делим этот отрезок точками D1,
C1
и E1
на четыре равные части. Соединяя точки
D
и D1,
С
и C1,
E
и
E1,
получаем ускорения этих точек
![]() ,
,
![]() и
и
![]() .
Пользуясь масштабом, находим их модули
и по чертежу определяем их направления.
.
Пользуясь масштабом, находим их модули
и по чертежу определяем их направления.