

Скалярное и векторное произведение векторов
Скалярным произведением векторов
![]() и
и
![]() называется
скаляр, равный произведению модулей
этих векторов на косинус угла
называется
скаляр, равный произведению модулей
этих векторов на косинус угла
![]() между
ними
между
ними
![]() .
.
Скалярное произведение обращается в
нуль, если один из сомножителей есть
нуль-вектор, или если векторы
![]() и
и
![]() перпендикулярны.
перпендикулярны.
Скалярный квадрат вектора есть квадрат его модуля.
![]() .
.
Скалярного куба (и тем более высших степеней) в векторной алгебре нет.
Скалярное произведение коммутативно, т.е. не зависит от порядка сомножителей
![]() ,
,
и дистрибутивно, т.е. произведение
вектора
![]() на сумму нескольких векторов равно
сумме произведений вектора
на сумму нескольких векторов равно
сумме произведений вектора
![]() на каждый из складываемых векторов,
взятый в отдельности.
на каждый из складываемых векторов,
взятый в отдельности.
В
Рис.П1.8
![]() .
.
Векторным произведением вектора
![]() на не коллинеарный (не параллельный)
ему вектор
на не коллинеарный (не параллельный)
ему вектор
![]() называется
третий вектор
называется
третий вектор
![]() ,
который строится следующим образом
(рис.П1.8):
,
который строится следующим образом
(рис.П1.8):
-
его модуль численно равен площади параллелограмма, построенного на векторах
 и
и
 ,
т.е. он равен
,
т.е. он равен
 ;
; -
его направление перпендикулярно плоскости упомянутого параллелограмма;
-
при этом направление вектора
 выбирается
так, чтобы векторы
выбирается
так, чтобы векторы
 составляли правовинтовую систему, т.е.
его направление связано с направлением
вращения от первого сомножителя ко
второму правилом винта
составляли правовинтовую систему, т.е.
его направление связано с направлением
вращения от первого сомножителя ко
второму правилом винта
Обозначение векторного произведения:
![]() или
или
![]() .
.
Векторное произведение дистрибутивно, но не обладает свойством коммутативности. Перестановка сомножителей вызывает изменение направления результирующего вектора на противоположное
![]() .
.
В декартовой системе векторное произведение можно представить в виде определителя
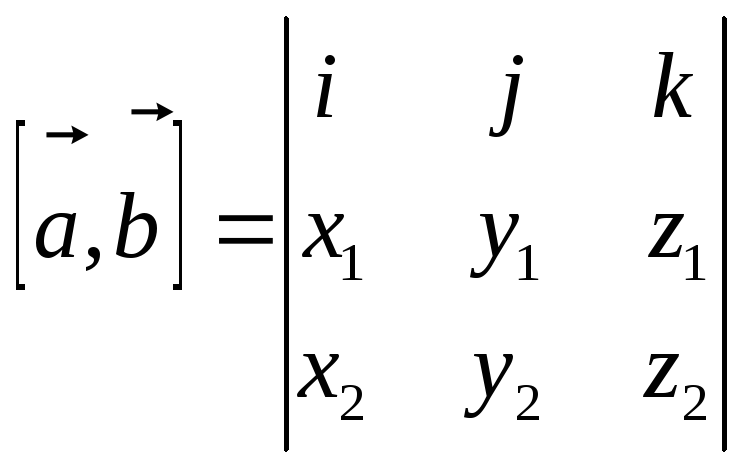 .
.
Смешанным (или векторно-скалярным)
произведением трех векторов![]() (взятых
в указанном порядке) называется скалярное
произведение вектора
(взятых
в указанном порядке) называется скалярное
произведение вектора
![]() на векторное произведение
на векторное произведение
![]() ,
т.е. число
,
т.е. число
![]() ,
или, что то же
,
или, что то же
![]() .
Обозначение:
.
Обозначение:
![]() .
.
Смешанное произведение векторов
![]() равно
объему параллелепипеда, построенного
на этих векторах.
равно
объему параллелепипеда, построенного
на этих векторах.
При круговой перестановке сомножителей смешанное произведение не меняется, при перестановке двух сомножителей – меняет знак на обратный:
![]() .
.
Смешанное произведение, имеющее хотя бы два равных сомножителя, равно нулю
![]() .
.
Выражение смешанного произведения через координаты сомножителей
 .
.
Двойным векторным произведением называется выражение
![]() .
.
Производная и дифференциал
Предел, к которому стремится отношение
бесконечно малого приращения функции
![]() к бесконечно малому приращению аргумента
к бесконечно малому приращению аргумента
![]() ,
называется производной и обозначается
следующим образом
,
называется производной и обозначается
следующим образом
Рис.П1.9![]()

Производная численно равна тангенсу
угла наклона касательной к кривой
![]() в точке
в точке
![]() (рис.П1.9) Если
(рис.П1.9) Если
![]() ,
то при увеличении
,
то при увеличении
![]() функция
функция
![]() возрастает, если
возрастает, если
![]() то
при возрастании
то
при возрастании
![]() функция
функция
![]() уменьшается.
уменьшается.
В физике принято производные по времени обозначать символом соответствующей величины с точкой над ним, например,
![]() ,
,
![]() .
.
Дифференциалом функции
![]() называется произведение производной
на приращение аргумента:
называется произведение производной
на приращение аргумента:
![]() ,
,
где
![]() -
производная
-
производная
![]() по
по
![]() .
.
Производную функции y по аргументу x бывает удобно обозначать через дифференциалы
![]() .
.
Производная сложной функции равна производной по вспомогательной переменной, умноженной на производную этой переменной по аргументу
![]() .
.
Дифференциал произведение двух функций равен сумме произведений каждой функции на дифференциал другой
![]() .
.
Дифференцировал дроби:
![]() .
.
Полный дифференциал функции нескольких
переменных
![]() определяется
по формуле
определяется
по формуле
![]()
![]() ,
,
где
![]() -
частные производные функции по
соответствующим переменным. Для
нахождения частной производной, например
-
частные производные функции по
соответствующим переменным. Для
нахождения частной производной, например
![]() ,
достаточно найти обыкновенную производную
переменной f, считая
последнюю функцией одного аргумента
x.
,
достаточно найти обыкновенную производную
переменной f, считая
последнюю функцией одного аргумента
x.
Таблица П1.1