

1.3. Ускорение
 Рис.
1.3
Рис.
1.3
При движении точки по криволинейной траектории величина и направление скорости могут изменяться. Быстроту изменения вектора скорости с течением времени характеризует ускорение.
Рассмотрим движение материальной точки
по некоторой кривой (1.3). Пусть в некоторый
момент времени t1
точка имела скорость
![]() ,
а в момент времени t2
- скорость
,
а в момент времени t2
- скорость
![]() .
Вектор
.
Вектор![]() характеризует
изменение скорости за время
характеризует
изменение скорости за время
![]() как по величине, так и по направлению.
Для его построения перенесем вектор
как по величине, так и по направлению.
Для его построения перенесем вектор
![]() параллельно самому себе так, чтобы его
начало совместилось с началом вектора
параллельно самому себе так, чтобы его
начало совместилось с началом вектора
![]() .
В этом случае вектор, соединяющий конец
.
В этом случае вектор, соединяющий конец
![]() с концом
с концом
![]() и будет представлять собой вектор
и будет представлять собой вектор
![]() .
Отношение изменения скорости
.
Отношение изменения скорости
![]() к тому промежутку времени
к тому промежутку времени
![]() ,
в течение которого это изменение
произошло, выражает вектор среднего
ускорения за этот промежуток времени
,
в течение которого это изменение
произошло, выражает вектор среднего
ускорения за этот промежуток времени
![]() .
(1.12)
.
(1.12)
Мгновенным ускорением или ускорением точки в данный момент времени t называют величину, математически определяемую как
![]() (1.13)
(1.13)
Таким образом, вектор ускорения в любой момент времени равен первой производной по времени от вектора скорости, или второй производной от радиус-вектора. Численное значение ускорения можно рассчитать через вторую производную от пути по времени
![]() .
(1.14)
.
(1.14)
Вектор ускорения можно представить в виде векторной суммы его составляющих по осям координат
![]() .
(1.15)
.
(1.15)
В то же время, дифференцируя вектор скорости по времени, получаем
![]() .
(1.16)
.
(1.16)
Из сопоставления (1.15) и (1.16) следует, что проекции вектора ускорения на координатные оси равны первым производным соответствующих проекций скорости или вторым производным соответствующих координат по времени. Величина ускорения в этом случае равна
![]() .
(1.17)
.
(1.17)
В
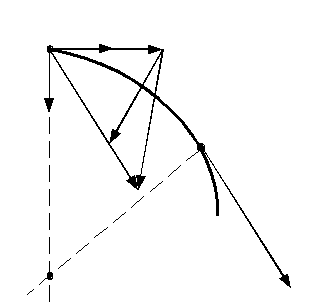 Рис.1.4
Рис.1.4![]() в виде суммы двух векторов (рис.1.4)
в виде суммы двух векторов (рис.1.4)
![]() .
(1.18)
.
(1.18)
При построении мы отложили отрезок
АС=АD, в результате чего,
вектор
![]() характеризует изменение скорости по
величине, вектор
характеризует изменение скорости по
величине, вектор
![]() - ее изменение по направлению. Проведем
также к векторам
- ее изменение по направлению. Проведем
также к векторам
![]() и
и
![]() линии нормали, которые пересекутся в
некоторой точке О, называемой центром
кривизны траектории АВ. При приближении
точки В к точке А расстояния R1
и R2 стремятся к
некоторой величине R,
которая называется радиусом кривизны
траектории в точке А.
линии нормали, которые пересекутся в
некоторой точке О, называемой центром
кривизны траектории АВ. При приближении
точки В к точке А расстояния R1
и R2 стремятся к
некоторой величине R,
которая называется радиусом кривизны
траектории в точке А.
Разделив обе части выражения (1.18) на
![]() и перейдя к пределу, получим
и перейдя к пределу, получим
![]() .
(1.19)
.
(1.19)
Первое слагаемое в правой части представляет ускорение, которое характеризует только изменение скорости по величине, оно называется тангенциальным ускорением. Второе слагаемое характеризует только изменение направления скорости и называется нормальным ускорением.
Можно показать, что
![]() ,
(1.20)
,
(1.20)
где
![]() -
единичный вектор, направленный по
касательной к траектории в рассматриваемой
точке (тангенциальный – означает
касательный: отсюда – название ускорения).
А также
-
единичный вектор, направленный по
касательной к траектории в рассматриваемой
точке (тангенциальный – означает
касательный: отсюда – название ускорения).
А также
![]() ,
(1.21)
,
(1.21)
где
![]() - единичный вектор нормали к мгновенной
скорости в рассматриваемой точке
траектории, отсюда название – нормальное
ускорение; R – радиус
кривизны траектории в данной точке.
- единичный вектор нормали к мгновенной
скорости в рассматриваемой точке
траектории, отсюда название – нормальное
ускорение; R – радиус
кривизны траектории в данной точке.
Таким образом, тангенциальное и нормальное ускорения представляют собой две взаимно перпендикулярные составляющие полного ускорения, а следовательно,
![]() .
(1.22)
.
(1.22)
Н
Рис.1.5
![]() и
и
![]() :
:
![]() .
(1.23)
.
(1.23)