

2.4 Длина одной минуты дуги параллели
Исходя из условия кривизны любой кривой, можно записать выражение для длины 1 минуты дуги параллели:
Р=rarc1
Ранее мы нашли, что х = r, тогда вместоrподставим значение координаты х и запишем:
Р=rarc1=
![]() ,
вместоarc1
и аподставим их значения и
получим окончательно:
,
вместоarc1
и аподставим их значения и
получим окончательно:
![]() метр
(1.13)
метр
(1.13)
Эксцентриситет
![]() ,
а е2=
0,0066934
,
а е2=
0,0066934
2.5 Ортодромия локсодромия
Используя навигационные морские карты, судоводители прокладывают на них путь в виде прямой линии. Из условия построения карты, такой прямой путь на карте не будет кратчайшим на местности. Путь (прямая), проложенный на карте в Меркаторской проекции называется локсодромией(кривой бег). Кратчайший же путь между двумя точками на земной поверхности эллипсоида является сложной кривой, называемойгеодезической линией. На поверхности сферы (шара) кратчайшее расстояние между двумя точками измеряется по дуге большого круга, т.е. круга, образованного пересечением плоскости, проходящей через центр сферы и заданные точки, со сферической поверхностью. Такая дуга в навигации называетсяортодромией(Рис.1.6). Уравнение ортодромии, проходящей через заданные точки, имеет вид:
CtgA1=tg2Cos1Cosec-Sin1Ctg(11), где:
А1– направление ортодромии в точке В1,
- разность долгот точек В2и В1.
 При
анализе уравнения ортодромии можно
сделать следующие выводы:
При
анализе уравнения ортодромии можно
сделать следующие выводы:
1. при расположении точек В1и В2на одном меридиане ортодромия совпадает с меридианом этих точек.
2. ортодромия пересекает меридианы под разными углами (А0, А1, А2),
3. при расположении точек по экватору ортодромия совпадает с экватором.
Рис1.6
Разность углов, под которыми ортодромия пересекает меридианы двух точек, называетсясближением (схождением) меридианов. γ = А2– А1.
Угол схождения меридианов рассчитывается по приближенной формуле:
γ
= 2arc tg tg(![]() )
Sinср
(1.14)
)
Sinср
(1.14)
Основные свойства локсодромии:
Если курс равен 180 или 360, то локсодромия совпадает с меридианом и ортодромией (см 1.6) К=0. tgK= 0.2-1= 0. .2=1)
Если курс равен 90 или 270, то локсодромия совпадает с параллелью или экватором, т.е. образует малый или большой круг на поверхности Земли.
При любых других курсах локсодромия спиралеобразно стремится к полюсу, никогда его не достигая.
П
Из треугольника
ОАС (Рис.1.7) определяем отношение радиусов
экватора (R) и параллели
(r).r=RCos.
Отсюда длина любой параллели будет
равна 2r= 2RCos. Отрезок
параллели между двумя какими-либо
меридианами равен отрезку экватора
между теми же меридианами, умножен-
Рис. 1.7
ному на косинус широты этой параллели.
Возьмем на локсодромии две точки М1(1,1) и М2(2,2) (Рис. 1.8a), находящиеся на малом расстоянии одна от другой (dS). Из элементарного треугольника М1М2С (Рис.18.b) имеем:
tgK =
![]() ,
откудаd=tgK
,
откудаd=tgK![]() ,
проинтегрировав это последнее выражение,
получим:
,
проинтегрировав это последнее выражение,
получим:
 ,
после решения интегралов,
,
после решения интегралов,
d
C
dCos M2 K dS M1 Рис.1.8а Рис.1.8b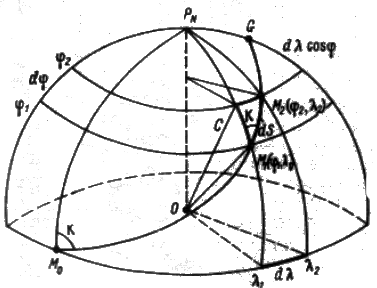




получим уравнение локсодромии:
2-1 = tg K ln tg(/4+2/2) – ln tg (/4 + 1/2) (1.15)
Возвращаясь к форме Земли как сфероиду, локсодромия примет вид:
2-1=tgK
![]() lntg(
lntg(
локсодромия на навигационной карте:
y – y0 = (x – x0) tgK, ( - 0) = (D – D0) tg K,
РД = РМЧ tgK(1.16)
K x, y



D
 Рис.1.9
Рис.1.9
D
x0,
y0
0