

10.1 Изолинии и линия положения
Как бы тщательно не велось счисление пути судна, оно не может обеспечить безопасность плавания. Возможные погрешности в поправках навигационных приборов (компаса, лага), неточное знание элементов течения, трудности в определении величины угла дрейфа – все это приводит к значительным погрешностям счисления и отклонению судна от заданного пути. Естественно возникает необходимость корректировать счисление по результатам измерений различных навигационных параметров. Определение места судна при плавании вблизи берегов и навигационных опасностей является необходимым условием обеспечения безопасности, а в море - ориентировки и экономичности рейса.
Определение места судна (ОМС) или обсервация, это отыскание географических координат (о,о) той точки, где в данный момент находится судно. Для определения места судна необходимо измерить как минимум два навигационных параметра.
Геометрические величины, измеряемые непосредственно или косвенным путем для определения места судна в море по береговым и небесным ориентирам называют навигационными параметрами.
Измеренный навигационный параметр будет характеризовать изолинию, на которой находится место судна. Обсервация - это не только измерение двух навигационных параметров, но и выбор угла пересечения изолиний. Этот угол должен быть не менее 30и не более 150.


 аbc
аbc


 D1
D1

Рис. 1.54
Пеленг- дистанция- разность расстояний-
прямая линия окружность гипербола
Изолиния на земной поверхности, представляет собой геометрическое мест точек, в которых сохраняется постоянство навигационного параметра (Рис. 1.54). Изолиния пеленга - это прямая линия (a). Изолиния расстояния - это на ограниченном пространстве окружность (b).
Изолиния разности расстояний - это гипербола (c). Изолиния высоты светила - это круг равных высот.
Если прямую линию и окружность на карте меркаторской проекции провести не сложно, то гиперболу и круг равных высот начертить на такой карте и трудно, и требуется значительное время. Для упрощения решения задачи изолинию вблизи счислимого места начали заменять прямой линией, касательной к этой изолинии или секущей ее, называемой линией положения.
Линия положения это прямая линия на небольшом участке, заменяющая изолинию в районе ОМС, обычно секущая или касательная к изолинии.
Интересна история получения все больших знаний о линии положения. Всему виноват случай, но, как писал А.С. Пушкин «И случай, бог изобретатель» привел к целому направлению исследований линии положения. А случай навел на мысль американского капитана Т. Сомнера, круг равных высот заменить секущей, проходящей через две точки на изолинии (Рис.1.55). Когда при нанесении точек круга равных высот он увидел, что прямая соединяющая две точки изолинии при продолжении выводит прямо на маяк, он решил проверить правильность предположения о такой замене и направил судно по направлению секущей. Через некоторое время он, действительно увидел маяк прямо по носу. Это метод называют методом Сомнера или долготным. В уравнении круга равных высот (КРВ) по Sinhвычисляет координаты двух точек, задаваясь счислимой широтой и затем ее изменение на 10.
Получают долготы (12) двух точек присис+ 10. Такие же вычисления выполняют с высотой второго светила. В конечном итоге две секущие дают точку пересечения - ОМС.
Позднее штурман черноморского флота Акимов в 1849 году предложил наносить высотную линию положения по координатам одной точки круга равных высот и вычисленному для этой точке азимуту (Рис.1.56). Линию положения проводят через рассчитанную точку КРВ, перпендикулярно азимуту (такой прием называют еще и «приемом Джексона», который издал для этого метода таблицы в 1962 году). Метод Сомнера несколько упростился.
(+ 10),2 Л П Рис.1.55 1
1



Т
Рис.1.56
В Азимут Рис.1.57 h=ho-hc Мсч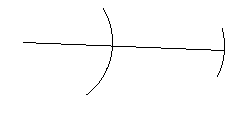
 первой половине прошлого века советский
ученый В.В. Каврайский распространил
идею метода Сент-Илера на все навигационные
изолинии (гипербола, изостадия и другие)
и дал обобщенную теорию линии положения(Рис.1.58;1.58а).
первой половине прошлого века советский
ученый В.В. Каврайский распространил
идею метода Сент-Илера на все навигационные
изолинии (гипербола, изостадия и другие)
и дал обобщенную теорию линии положения(Рис.1.58;1.58а).
Таким образом, счисление и обсервация это единый процесс решения основной задачи судовождения – обеспечение движения судна по выбранному маршруту.
Поэтому при всех условиях плавания нельзя пренебрегать ни тем, ни другим, а следует
использовать взаимный анализ для контроля и повышения надежности судовождения.