

8.2 Определение угла дрейфа различными способами



ОКП

 КУ
Кильватерная
струя
КУ
Кильватерная
струя


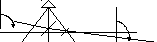
компас Рис.1.45
Угол дрейфа по кильватерной струе
При хорошей погоде кильватерная струя отчетливо видна за кормой. Определение угла дрейфа производится с помощью компаса (Рис. 1.45).
При определении угла дрейфа по кильватерной струе с азимутального круга компаса несколько раз снимают отсчеты курсового угла (КУ) на кильватерную струю, получают значение угла по формуле: = КУ – 180 или сравнивают ОКП с КК, тогда = ОКП – КК.
Например:КУ = 177 или ОКП = 267,0 и КК = 270,0
= 177 – 180 = 267,0 – 270,0 = - 3,0. = 3 пр/б.
Применяется способ, как ориентировочный, при больших углах дрейфа и снятии отсчетов курсовых углов.
Определение угла дрейфа по створу.
При плавании в узости судно следует по створу (Рис.1.46), а течение отсутствует. Угол дрейфа определяется как разность между ИП створа и ИК. Такой метод является контролирующим, позволяющим управлять движением судна.
ИП = ПУ= 90ИК = 93= ПУ- ИК= 90– 93= - 3

Рис.1.46
Определение угла дрейфа из обсерваций
Широко распространенный и наиболее надежный метод (Рис.1.47), сущность которого сводится к получению угла между ИК и линией, соединяющей серию 3-4 обсервованных точек, полученных наиболее точным способом определения места судна (по трем пеленгам или трем дистанциям, по двум горизонтальным углам).
ИК



⊙ ⊙
ПУ
Точки, как правило, будут не на одной линии, поэтому проводят осредненную линию ПУ.
Определение угла дрейфа по пеленгам свободноплавающего ориентира.
Применяя этот метод (Рис.1.48), измеряют три пеленга на ориентир с разностью около 30 градусов и с помощью секундомера фиксируют промежутки времени (Т1иТ2) между наблюдениями.
ИК
fb cПУ
А В Рис.1.48
П1 S П2 S2 П3
Предполагается, что движение судна прямолинейно и равномерно. При этом условии отрезки пути (S1 и S2), пройденные между моментами измерения пеленгов будут пропорциональны промежуткам времениТ1иТ2.
На карте от ориентира проводят пеленги П1, П2и П3. Из произвольной точки А проводят линию ИК, так чтобы линии пеленгов с ней пересекались. Из точки пересечения ИК с П1по линии ИК откладывают расстояния равные пройденному пути за времяТ1иТ2.
S1=KT1S2=KT2. Здесь К – коэффициент пропорциональности.
Через концы отрезков (S1 и S2) проводят прямые, параллельные линии первого пеленга П1.
На линиях
пеленгов П2и П3получают
точкиbиc.
Прямая, проведенная через точкиbиcбудет линией путевого
угла, так как на основании свойств
параллельных линий, пересекающих пучок
прямых, сохраняется![]() равенство отношений:
равенство отношений:
![]()
Сняв с карты это направление, сравнивают с ИК и получают угол сноса от ветра (угол дрейфа).
При равенстве промежутков Т1 = Т2 (Рис.1.49),на втором пеленге выбирают произвольную точкуbи через нее проводят прямые, параллельные первому и третьему пеленгам. Искомый путевой угол будет соответствовать углу между меридианом и линиейac,так какadравноcd из свойства диагоналей параллелограмма.
Поэтому, где бы не выбирали точку bна линии второго пеленга равенство отрезков диагонали(ad = dc)сохранится.
NИО





 ПУ
ПУ


 ИКdc
ИКdc

 a= ПУ- ИК
a= ПУ- ИК

bРис. 1.49
8. Определение угла дрейфа по курсовым углам ориентира.
На постоянном курсе снимают отсчет курсовых углов ориентира так, чтобы первый КУ был меньше 90(КУ90), второй курсовой угол был равен 90(КУ =90) и третий курсовой угол должен быть боле 90(КУ90).
А
 Рис. 1.50
Рис. 1.50
q1 q2 q3
При снятии отсчетов курсовых углов засекают время, для того чтобы определить время плавания между первым КУ (q1) и траверзным КУ (q2) –tтр , а также между первым КУ(q1) и третьим КУ (q3) –t. Тогда можно применить формулу:
= 57,3 (![]() (1.62)
(1.62)
Применяя этот метод (Рис.1.50), получают угол дрейфа в прошлом, и если условия не меняются, то он учитывается и при дальнейшем плавании.
Дрейф измеренный дрейфомером.
Дрейфомер – это прибор, измеряющий скорость по диаметральной плоскости судна и в перпендикулярном направлении. Геометрическая сумма векторов дает угол дрейфа.
Не решая графически скоростной треугольник, можно рассчитать угол дрейфа по формуле:
= arctg
![]() ,
а скорость - по линии пути:V=
,
а скорость - по линии пути:V=![]()
На основе статистических данных для расчета угла дрейфа применяют способы Матусевича и Демина.