

1.6 Основные правила преобразования структурных схем
Т аблица
1 –Правила
преобразования структурных схем
аблица
1 –Правила
преобразования структурных схем
|
№ п/п |
Операция |
Исходная схема |
Эквивалентная схема |
|
1 |
2 |
3 |
4 |
|
1 |
Переста-новка сум-маторов |
|
|


Продолжение таблицы 1
|
1 |
2 |
3 |
4 |
|
2 |
Переста-новка зве-ньев |
|
|
|
3 |
Перенос узла с вы-хода на вход сум-матора |
|
|
|
4 |
Перенос узла со входа на выход сумматора |
|
|
|
5 |
Перенос узла с вы-хода на вход звена |
|
|
|
6 |
Перенос узла со входа на выход звена |
|
|
|
7 |
Перенос сумматора с выхода на вход звена |
|
|












Продолжение таблицы 1
|
1 |
2 |
3 |
4 |
|
8 |
Перенос сумматора со входа на выход звена |
|
|
|
9 |
Переход к единич-ной обрат-ной связи (ОС) |
|
|



1.7 Передаточные функции замкнутых сау
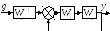
Составим структурную схему, соответствующую функциональной схеме на рисунке 0.1.
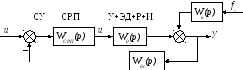
Рисунок 1.7.1 – Структурная схема
На рис. 1
![]() –передаточная
функция объекта управления по нагрузке,
–передаточная
функция объекта управления по нагрузке,
![]() –передаточная
функция объекта управления по управляющему
сигналу
–передаточная
функция объекта управления по управляющему
сигналу
![]() ,
,
![]() –передаточная
функция счетно-решающего прибора,
–передаточная
функция счетно-решающего прибора,
![]() –передаточная
функция датчика скорости.
–передаточная
функция датчика скорости.
Стандартной структурной схемой является схема, приведенная к единичной ОС. Приведём схему рис. 1 к единичной ОС.

Рисунок 1.7.2 – Структурная схема с единичной обратной связью
На рис. 2
![]() – передаточная функция регулятора;
– передаточная функция регулятора;![]() – передаточная функция разомкнутой
системы;
– передаточная функция разомкнутой
системы;
![]() – задающее воздействие, равное желаемому
значению выходного сигнала
– задающее воздействие, равное желаемому
значению выходного сигнала
![]() ,
(
,
(![]() имеет ту же размерность, что и
имеет ту же размерность, что и![]() );
);
![]() – ошибка системы.
– ошибка системы.
![]() . (1.7.1)
. (1.7.1)
Устойчивость или
неустойчивость САУ, а также её точность,
в основном, определяются замкнутым
контуром. Поэтому звено с передаточной
функцией
![]() не рассматривается.
не рассматривается.
Получим передаточную функцию замкнутой САУ. Из рисунка 2
![]() . (1.7.2)
. (1.7.2)
Если из системы
уравнений (1) и (2) исключить
![]() ,
то получим
,
то получим
![]() . (1.7.3)
. (1.7.3)
Если из уравнений
(1), (2) исключить
![]() ,
тогда
,
тогда
![]() . (1.7.4)
. (1.7.4)
Выражения (3), (4) записаны для замкнутой САУ. Из этих выражений можно получить следующие передаточные функции замкнутой САУ:
– передаточная функция замкнутой САУ по задающему воздействию (главный оператор)
![]() , (1.7.5)
, (1.7.5)
– передаточная функция замкнутой САУ по ошибке от задающего воздействия
![]() ,
,![]() , (1.7.6)
, (1.7.6)
– передаточная функция замкнутой САУ по нагрузке
![]() . (1.7.7)
. (1.7.7)
Найдём выражения для передаточных функций САУ с неединичной ОС, представленной на рис. 3.

Рисунок 1.7.3 – Структурная схема с неединичной обратной связью
![]() .
.
Передаточной функцией замкнутой САУ по ошибке будет
 (1.7.8)
(1.7.8)
Формула (8) совпадает с формулой (6), полученной для единичной обратной связи.
Закон, в соответствии с которым функционирует система управления, выраженный в математической форме, называется законом (алгоритмом) управления.