

0 Общие сведения о системах управления
Курс теории автоматического управления (ТАУ) изучает общие принципы построения систем автоматического управления (САУ), процессы, протекающие в этих системах, а также методы исследования этих процессов.
Принцип действия и функциональная схема сау.

Рисунок 0.1 – Функциональная схема системы управления скоростью вращения ротора электродвигателя
На рис. 1
ПУ – программное
устройство, вырабатывающее сигнал
![]() (программное), соответствующий желаемому
значению скорости вращения электродвигателя
(программное), соответствующий желаемому
значению скорости вращения электродвигателя![]() ,
,
СУ – сравнивающее
устройство, осуществляющее математическую
операцию
![]() ,
,
ДС – датчик скорости электродвигателя ЭД,
![]() –сигнал,
пропорциональный скорости
–сигнал,
пропорциональный скорости
![]() ,
,
![]() –сигнал, связанный
с ошибкой системы,
–сигнал, связанный
с ошибкой системы,
СРП – счетно-решающий
прибор, который может быть выполнен в
виде аналоговой или цифровой вычислительной
машины, вырабатывает управляющий сигнал
![]() ,
в который заложен алгоритм (закон)
управления,
,
в который заложен алгоритм (закон)
управления,
У – усилитель мощности,
![]() –усиленный
управляющий сигнал,
–усиленный
управляющий сигнал,
ЭД – электродвигатель,
Р – редуктор,
И – инструмент,
ДН – датчик нагрузки
![]() ,
,
![]() –сигнал,
пропорциональный нагрузке
–сигнал,
пропорциональный нагрузке
![]() ,
,
![]() –сила трения.
–сила трения.
Цепь, содержащая ДС, является обратной связью (ОС).
Обратной связью называется цепь, соединяющая выход какого-либо звена с его входом или непосредственно, или посредством других звеньев.
Пунктирная цепь не является обратной связью, т.к. ОС обеспечивает циркуляцию сигнала по замкнутому контуру.
На рис. 2 представлены переходные процессы при разгоне и торможении двигателя.
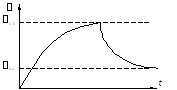
Рисунок 0.2 – Переходные процессы при разгоне и торможении
Переходные процессы стремятся к постоянным значениям за счет действия отрицательной обратной связи.
Автоматическим
управлением
называется изменение желаемым образом
регулируемой переменной (![]() )
при помощи ее измерения и (или) действующих
на объект управления возмущений и
воздействия на регулирующий орган
объекта
(ЭД).
)
при помощи ее измерения и (или) действующих
на объект управления возмущений и
воздействия на регулирующий орган
объекта
(ЭД).
На рис. 1 изображена функциональная схема САУ, она состоит из двух частей: объекта регулирования (управления) и регулятора.
Объектом управления называется объект, в котором происходит процесс, подлежащий управлению (ЭД+Р+И), всё остальное называется регулятором.
Как объект управления, так и вся САУ подвержены внешним воздействиям.
Величины,
выражающие внешние влияния на объект,
называются воздействиями
на объект (![]() ).
).
Воздействие,
вырабатываемое управляющим устройством
(регулятором), называется управляющим
воздействием
(![]() ).
Воздействие на объект, не зависящее от
регулятора, называетсявозмущением
(
).
Воздействие на объект, не зависящее от
регулятора, называетсявозмущением
(![]() ).
).
Возмущения
подразделяются на нагрузку
(![]() )
ипомехи
(
)
ипомехи
(![]() ).
).
Переменные, подлежащие управлению (регулированию), называются управляемыми (регулируемыми) переменными.
Функциональной схемой называется такое графическое изображение САУ, в котором каждому звену соответствует вполне определённый функциональный блок.
Помимо функциональной схемы, САУ графически представляют в виде структурных схем.
Структурной схемой называется такое графическое изображение САУ, в котором каждому звену соответствует вполне определённая совокупность математических операций.