1.3 Классификация динамических звеньев
Под динамическим звеном понимают устройство любого физического вида и конструктивного оформления, но описываемое определённым дифференциальным уравнением. Под типовым динамическим звеном понимают звено, которое описывается дифференциальным уравнением не выше второго порядка. Звенья подразделяются на позиционные, интегрирующие и дифференцирующие.
Позиционными называют звенья, у которых передаточная функция отвечает условию
![]() ,
,
то есть передаточная
функция при
![]() равна константе, которая не равна нулю
и плюс/минус бесконечности.
равна константе, которая не равна нулю
и плюс/минус бесконечности.
Например:
![]() .
.
Интегрирующим называется такое звено, у которого
![]() .
.
Например:
![]() .
.
Дифференцирующим называется такое звено, у которого
![]() .
.
Например:
![]() .
.
Основные типовые звенья
1 Позиционные звенья.
1.1 Безынерционное звено (усилительное звено)
![]() .
.
1.2 Инерционное (апериодическое) звено первого порядка
![]() .
.
1.3 Консервативное, колебательное, инерционное (апериодическое) звенья второго порядка
![]() ,
,
где
![]() – параметр затухания,
– параметр затухания,
![]() –постоянная
времени,
–постоянная
времени,
![]() –коэффициент
передачи.
–коэффициент
передачи.
При
![]() звено называется консервативным, при
звено называется консервативным, при![]() – колебательным, при
– колебательным, при![]() – инерционным второго порядка.
– инерционным второго порядка.
1.4 Форсирующее звено
![]() .
.
2 Интегрирующие звенья.
2.1 Идеальное интегрирующее звено
![]() .
.
2.2 Интегрирующее звено с замедлением
![]() .
.
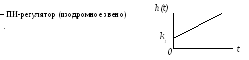
2.3 Изодромное звено (ПИ-регулятор)
![]() ,
,
![]() .
.
3 Дифференцирующие звенья.
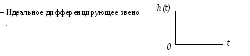
3.1 Идеальное дифференцирующее звено
![]() .
.
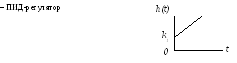
3.2 Реальное дифференцирующее звено (звено с замедлением)
![]() .
.
1.4 Динамические характеристики звеньев
Динамические характеристики подразделяются на временные и частотные.
1.4.1 Временные динамические характеристики
Временные характеристики описывают переходные процессы в звеньях. Переходные процессы – это характер изменения выходных переменных при изменении входных сигналов или начальных условий. При устойчивости звеньев переходные процессы завершаются новыми установившимися значениями.
Характеристика – графическое изображение функции.
Временные динамические характеристики подразделяются на перехόдные функции (характеристики) и функции (характеристики) веса, другими словами, переходные импульсные функции.
Переходная
функция
h(t)
представляет собой переходный процесс
на выходе звена, возникающий при подаче
на его вход единичного
ступенчатого воздействия
(![]() )
при нулевых начальных условиях.
)
при нулевых начальных условиях.
Функцией веса
w(t)
называется реакция на выходе звена при
подаче на его вход единичной
импульсной функции
![]() при нулевых начальных условиях.
при нулевых начальных условиях.
Единичной импульсной функцией (функцией Дирака) называется импульс нулевой длительности, бесконечной амплитуды и единичной площади.
Установим связь между временными характеристиками. Легко убедиться в том, что
![]() . (1.4.1.1)
. (1.4.1.1)
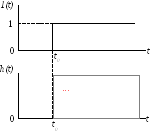
Рисунок 1.4.1.1 – Переходная характеристика
На основании формулы Коши и зависимости (1) можно получить
![]() . (1.4.1.2)
. (1.4.1.2)
На рис. 2 соотнесены
![]() -функция
и функция веса.
-функция
и функция веса.

Рисунок 1.4.1.2 – Весовая характеристика
Переходные функции используются в структурных схемах для обозначения соответствующих звеньев.