

1.9.4 Интегральные показатели качества
Интегральные критерии дают общую оценку скорости затухания и величины отклонения регулируемой переменной в совокупности.
При монотонных переходных процессах (рис. 1) в роли интегрального критерия качества может использоваться интеграл (1)
![]() , (1.9.4.1)
, (1.9.4.1)
где
![]() – собственная составляющая движения.
– собственная составляющая движения.![]() равен площади между кривой и осью
абсцисс.
равен площади между кривой и осью
абсцисс.
Чем меньше эта площадь, тем быстрее переходный процесс и тем меньше ошибка системы. Однако этот критерий не годится для знакопеременных переходных процессов (рис. 2).
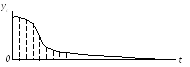
Рисунок 1.9.4.1
Рисунок 1.9.4.2
Для того чтобы этот критерий годился для знакопеременных переходных процессов, надо его модифицировать до вида
![]() или
или![]() . (1.9.4.2)
. (1.9.4.2)
Однако этот критерий не учитывает колебательности системы.
Чем выше колебательность системы, тем большие по модулю скорости возникают в переходных процессах. Поэтому, естественно, для того, чтобы учесть (минимизировать) колебательность, в интегральный критерий качества должна быть включена скорость переходного процесса.
![]() , (1.9.4.3)
, (1.9.4.3)
где
![]() – весовой коэффициент, имеющий
размерность времени. В процессе
проектирования системы управления
интегральный критерий качества должен
минимизироваться. Рассмотрим предельный
переходный процесс, который будет иметь
место при минимизации критерия
– весовой коэффициент, имеющий
размерность времени. В процессе
проектирования системы управления
интегральный критерий качества должен
минимизироваться. Рассмотрим предельный
переходный процесс, который будет иметь
место при минимизации критерия![]() .
.
т.к. система
асимптотически устойчива, то
![]() .
Тогда
.
Тогда
 ,
,
где
![]() – начальное условие. В результате
проделанных преобразований получим
– начальное условие. В результате
проделанных преобразований получим
![]() . (1.9.4.4)
. (1.9.4.4)
Начальное условие обычно не оптимизируется, т.к. зависит от случайных обстоятельств и является постоянным. Минимизация осуществляется за счёт минимизации интеграла. Интеграл будет минимальным, когда подынтегральное выражение равно 0, т.е.
![]() (1.9.4.5)
(1.9.4.5)
(инерционное звено I порядка).
Решение данного уравнения показано на рис. 3.
Из этого рисунка
видно влияние весового коэффициента
![]() на вид предельного переходного процесса.
на вид предельного переходного процесса.
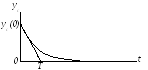
Рисунок 1.9.4.3
1.9.5 Частотные показатели качества
Они базируются
на критериях устойчивости Найквиста
(см. подпункты 1.8.3.2, 1.8.3.4). Частотные
критерии дают оценки запасов
устойчивости. Рассмотрим АФЧХ разомкнутой
системы, которая в замкнутом состоянии
асимптотически устойчива (рис.
1), где АФЧХ
![]() .
.
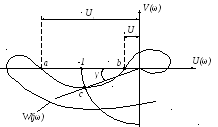
Рисунок 1.9.5.1 – АФЧХ разомкнутой системы и запасы устойчивости
Запасы устойчивости
характеризуют расстояния от точки (-1;
j0) до точек
![]() АФЧХ. В качестве таких расстояний
приняты
АФЧХ. В качестве таких расстояний
приняты![]() и угол
и угол![]() .
В роли запасов устойчивости рассматриваютзапасы
устойчивости
по амплитуде
(модулю) и
фазе. Запасы
устойчивости по модулю
.
В роли запасов устойчивости рассматриваютзапасы
устойчивости
по амплитуде
(модулю) и
фазе. Запасы
устойчивости по модулю
![]()
![]() . (1.9.5.1)
. (1.9.5.1)
Система считается хорошей, когда запасы устойчивости лежат в пределах от 6 до 20 дБ. В роли запаса устойчивости по фазе выступает угол
![]() , (1.9.5.2)
, (1.9.5.2)
где
![]() – частота среза. (В реальных системах
– частота среза. (В реальных системах
![]() отрицательно).
отрицательно).
Система считается хорошей, когда запас устойчивости по фазе лежит в пределах от 30о до 60о.
Те же самые показатели качества можно определить с помощью логарифмических характеристик.
На рис. 2 представлена
диаграмма Боде (совокупность ЛАЧХ и
ЛФЧХ), на которой показаны запасы
устойчивости по модулю (амплитуде)
![]() и фазе
и фазе![]() .
.
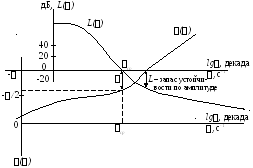
Рисунок 1.9.5.2 – Диаграмма Боде