

3.7 Критерий абсолютной устойчивости в.М. Пóпова
Абсолютная устойчивость – это устойчивость в целом нелинейной системы при задании её нелинейности в определённом классе.
Ниже будут рассматриваться статические характеристики, лежащие в заштрихованных секторах, как это показано на рис. 1.
Таким образом, сама нелинейность не имеет конкретного вида. О ней лишь известно, что она лежит в заданном секторе. Это является существенным достоинством данного метода.
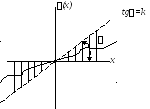
Рисунок 3.7.1 – Зона расположения статической характеристики нелинейного звена
Будем рассматривать следующую систему, представленную на рис. 2.
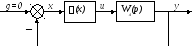
Рисунок 3.7.2 – Структурная схема нелинейной САУ
На рис. 2
![]() – статическая характеристика нелинейного
звена (например, регулятора);
– статическая характеристика нелинейного
звена (например, регулятора);
![]() – передаточная функция линейной части
системы (например, объекта управления).
– передаточная функция линейной части
системы (например, объекта управления).
Для определения устойчивости по критерию Попова используется следующая частотная характеристика Попова:
![]() . (3.7.1)
. (3.7.1)
Для сравнения приведём АФЧХ линейной части системы:
![]() . (3.7.2)
. (3.7.2)
Рассмотрим вначале случай, когда линейная часть системы устойчива (асимптотически устойчива или находится на границе устойчивости). В этом случае критерий читается так:
Система абсолютно
устойчива, если при устойчивости
линейной части через точку с координатами
![]() можно провести хотя бы одну прямую так,
чтобы вся характеристика
можно провести хотя бы одну прямую так,
чтобы вся характеристика
![]() при изменении частоты от нуля до
бесконечности находилась от неё справа.
при изменении частоты от нуля до
бесконечности находилась от неё справа.
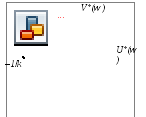
Рисунок 3.7.3 – Частотная характеристика Попова
Данная прямая называется линией Попова. При обозначении осей на рис. 3 использовано разложение
![]() .
.
На рисунке 3 представлен случай, когда замкнутая система абсолютно устойчива. На рисунке 4 представлен случай, когда критерий Попова не выполняется, но т.к. этот критерий является достаточным, то его невыполнение ещё не говорит о том, что система не является абсолютно устойчивой.
Рассмотрим теперь случай, когда линейная часть системы сама по себе неустойчива. Для применения критерия в данном случае надо ввести фиктивные цепи. (На рис. 5 показаны пунктиром).

Рисунок 3.7.4 – Частотная характеристика Попова. Случай невыполнения критерия Попова

Рисунок 3.7.5 – Исходная и эквивалентная структурные схемы нелинейной системы
На рис. 5
![]() – фиктивное безынерционное звено. С
учётом того, что
– фиктивное безынерционное звено. С
учётом того, что![]() ,
на компараторе 3 сигналы, проходящие
по фиктивным цепям, взаимно уничтожаются.
,
на компараторе 3 сигналы, проходящие
по фиктивным цепям, взаимно уничтожаются.
Вводятся в рассмотрение фиктивные звенья
![]() ,
,![]() (3.7.3)
(3.7.3)
С учётом (3) схему, изображённую на рис. 5, можно укрупненно представить в виде схемы, изображённой на рис. 6.
Задача сводится
к выбору
![]() таким, чтобы звено
таким, чтобы звено![]() было устойчивым. В этом случае критерий
формулируется так:
было устойчивым. В этом случае критерий
формулируется так:
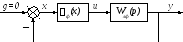
Рисунок 3.7.6 – Приведённая линейная структурная схема
Система абсолютно
устойчива, если через точку с координатами
![]() можно провести прямую линию, проходящую
слева от характеристики
можно провести прямую линию, проходящую
слева от характеристики
![]() .
При этом характеристика
.
При этом характеристика
![]() должна лежать между прямыми, проходящими
через начало координат с коэффициентами
крутизны
должна лежать между прямыми, проходящими
через начало координат с коэффициентами
крутизны![]() и
и![]() (рис. 7).
(рис. 7).
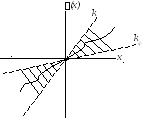
Рисунок 3.7.7 – Область расположения статической характеристики нелинейного звена