

2.5 Решение линейных разностных уравнений
Пусть дано линейное
разностное уравнение порядка
![]()
![]() (2.5.1)
(2.5.1)
Пусть начальные условия для простоты равны 0. Применим к левой и правой частям уравнения (1) теорему сдвига вправо, получим
![]() . (2.5.2)
. (2.5.2)
Из (2) получим
![]() , (2.5.3)
, (2.5.3)
 , (2.5.4)
, (2.5.4)
где
![]() – дискретная передаточная функция.
Она равна отношениюz-преобразованных
выходного и входного сигналов при
нулевых начальных условиях.
– дискретная передаточная функция.
Она равна отношениюz-преобразованных
выходного и входного сигналов при
нулевых начальных условиях.
Для нахождения
решения
![]() надо к выражению (3) применить обратноеz-преобразование,
т.е.
надо к выражению (3) применить обратноеz-преобразование,
т.е.
![]() . (2.5.5)
. (2.5.5)
2.6 Передаточные функции цифровых систем управления
Структурную схему системы управления с ЦВМ укрупненно можно представить в виде

Рисунок 2.6.1 – Гибридная схема управления САУ с ЦВМ
На рис. 1
![]() – дискретная передаточная функция
счётно-решающего прибора;
– дискретная передаточная функция
счётно-решающего прибора;
![]() – непрерывная передаточная функция
непрерывного объекта.
– непрерывная передаточная функция
непрерывного объекта.
Система является непрерывно-цифровой (гибридной). Хорошо разработаны методы исследования или непрерывных, или цифровых систем, поэтому для исследования этой системы её надо привести к одному из перечисленных видов. Если такт счёта достаточно мал, то в дискретной части разности можно приближенно заменить производными, а суммы на интегралы (приближённо). В результате получится непрерывная система. Это неточный метод.
Другим подходом
является замена непрерывной передаточной
функции
![]() на соответствующую дискретную
передаточную функцию. Это можно
осуществить аналогично получению
непрерывной передаточной функции по
весовой функции
на соответствующую дискретную
передаточную функцию. Это можно
осуществить аналогично получению
непрерывной передаточной функции по
весовой функции![]() с помощью преобразования Лапласа
с помощью преобразования Лапласа
![]() . (2.6.1)
. (2.6.1)
В цифровых системах
дискретная передаточная функция
![]() получается аналогично (1) какz-преобразование
весовой функции
получается аналогично (1) какz-преобразование
весовой функции
![]() . (2.6.2)
. (2.6.2)
Таким образом,
для одного и того же звена существуют
2 передаточные функции: непрерывная
![]() и дискретная
и дискретная![]() .
Это соответствие обозначается так:
.
Это соответствие обозначается так:
![]() . (2.6.3)
. (2.6.3)
Здесь символ
![]() служиттолько
для обозначения соответствия передаточных
функций и
не является
символом z-преобразования.
служиттолько
для обозначения соответствия передаточных
функций и
не является
символом z-преобразования.
Полностью цифровая система представлена на рис. 2. Для ее исследования можно применить методы, разработанные для цифровых систем. Ее поведение в точности соответствует поведению системы рис. 1 только в дискретные моменты времени. Недостатком данного перехода является то, что нет никакой информации о поведении системы на рис. 1 между этими моментами.

Рисунок 2.6.2 – Дискретная структурная схема САУ с ЦВМ
Рассмотрим связь дискретных и непрерывных передаточных функций при параллельном и последовательном соединении звеньев.
Пусть дано
параллельное соединение непрерывных
звеньев с ключом
![]() ,
изображенное на рис. 3.
,
изображенное на рис. 3.
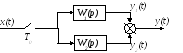
Рисунок 2.6.3 – Параллельное соединение звеньев
Дискретная передаточная функция для всей цепи
![]() .
.
Пусть дано последовательное соединение звеньев, изображенное на рис. 4.

Рисунок 2.6.4 – Последовательное соединение звеньев
Для рис. 4 следует считать, что
![]() .
.
Однако в том случае, когда имеется ключ между звеньями (рис. 5), справедливо соотношение
![]() .
.

Рисунок 2.6.5 – Последовательное соединение звеньев с разделительным ключом