

Теорія автоматичного керування. Теорія лінійних систем.
Основні поняття й термінологія теорії автоматичного керування.
Автоматизація технологічних процесів є однієї з найважливіших завдань технічного прогресу. При всьому різноманітті автоматичних пристроїв і шляхів автоматизації технологічних процесів існують загальні теоретичні положення, що служать науковим базисом і формують специфічні методи вивчення систем керування, їхнього аналізу й синтезу.
Кібернетика – наука про керування в різних сферах реального миру незалежно від фізичної природи об'єктів, що вивчає загальні принципи й закони керування.
Теорія автоматичного керування– частина кібернетики (технічна кібернетика), що вивчає питання керування в технічних системах.
Величезний внесок у розвиток теорії автоматичного керування внесли вітчизняні вчені: Ползунов, Попов, Солодовніков, Вишнєградський, Ципкин, Чумаков, Чинаєв, Суд-Злочевський, Ляпунов й ін.
Загальні поняття й визначення.
Під керуванням у технічних системах розуміється навмисний вплив на об'єкт керування, що забезпечує його необхідне функціонування.
Керування здійснюється (формується й реалізується) керуючою частиною системи. У тих випадках, коли деякі функції керування виконує оператор, система керування є автоматизованою (напівавтоматичне керування).
Якщо керування здійснюється без участі людини за допомогою технічних (керуючих) пристроїв, то система називається автоматичної (автоматичне керування).
Регулювання є частковим випадком керування. Завдання регулювання полягає в підтримці протягом тривалого інтервалу часу або зміні належним чином основних показників (координат стану) об'єкта керування.
Під об'єктами керування розуміють технологічні процеси, технологічне устаткування (машини, апарати, різні агрегати), які мають потребу в наданні спеціально організованих впливів з боку керуючої частини, що забезпечують досягнення поставленої мети керування.
Сукупність об'єкта керування й керуючого пристрою утворюють систему автоматичного керування.
Розглянемо
основні види впливів 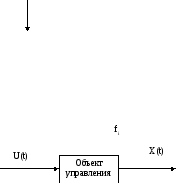 на
об'єкт керування
на
об'єкт керування
Стан об'єкта характеризується певними фізичними величинами (координатами стану), які повинні зберігатися постійними або змінюватися заданим чином у часі. Такі величини називаються керованими (регульованими) величинами або інакше, вихідними величинами об'єкта Хвих(t). Термін «вихідна величина» зовсім не означає, що вона є мірою вихідного матеріального потоку з об'єкта, цей термін прийнятий внаслідок позначення зазначеної величини на зображеній структурній схемі.
Керуючий вплив U(t), який формується керуючим пристроєм (регулятором) в автоматичних системах керування, спрямований на компенсацію дії зовнішніх впливів fi(t) (збурень), що збурюють стан об’єкта керування. Керуючий вплив є внутрішнім впливом, оскільки виробляється усередині системи однієї з її складових.
Збурюючі впливи fi(t) по своїй суті є наслідком впливу різних факторів зовнішнього середовища, які дестабілізують стан об'єкта.
Позначений у дужках аргумент tозначає, що і координата стану Хвих, і керуючий вплив U змінюються у часі.
Принципи керування.
Побудова систем автоматичного керування базується на деяких загальних принципах керування, обумовлених характером вихідної інформації, яка використовується керуючим пристроєм для вироблення керуючого впливу на об'єкт.
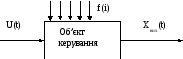
З метою компенсації впливу зовнішніх збурень на стан об'єкта в якості вихідної інформації для керуючого пристрою можна використати сумарну величину цих впливів, що пов'язане з необхідністю виміру всіх зовнішніх збурень. Такий принцип керування називають принципом керування по збуренню (принцип Понселе).
Розглянутий принцип керування, що ілюструється наведеною структурною схемою, має, як певні переваги, так і недоліки. Основна перевага полягає в досить високій швидкодії системи керування.
Це обумовлено тим, що керуючий вплив U(t) завдяки незначнй інерційності керуючої частини (у порівнянні з інерційністю об'єкта керування) виробляється досить швидко, тому стан об'єкта не встигає значно змінитися до моменту появи компенсуючого впливу.
Разом з тим, джерел збурень досить багато, деякі з них можуть бути невідомі взагалі, тому виміряти всі збурення практично неможливо. Крім того, всі вимірювальні прилади мають похибку вимірювання, в результаті чого вихідна інформація для керуючої частини не повною мірою відбиває правдиве значення величини збурення. З цієї причини керуючий вплив U(t) не може адекватно компенсувати вплив збурень, відбувається або недокомпенсація, або перекомпенсація. Керована величина не буде відповідати заданому значенню, зазначений принцип має невисоку точність керування.
При реалізації принципу керування по збуренню система керування є розімкнутою, оскільки інформація про фактичний стан об'єкта Х(t) не використовується при формуванні керуючого впливу U(t). Розімкнуті системи завжди відрізняються невисокою точністю керування.
Якщо для вихідної інформації керуючої частини використати відхилення керованої величини від завдання (помилку керування), то отримаємо принцип керування за помилкою (принцип Уатта).
Цей принцип керування припускає наявність головного зворотного зв'язку, по якому на елемент порівняння надходить інформація про фактичний стан об'єкта. Зворотний зв'язок є негативним, оскільки поступаюча по ньому величина Хвих(t) віднімається в елементі порівняння від заданої величини Y(t), в результаті чого на виході елемента порівняння утвориться сигнал, що є помилкою керування ε(t).
Н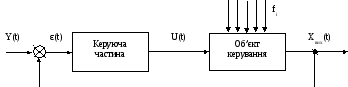 а
структурній схемі введені позначення:
а
структурній схемі введені позначення:
- Y(t) – задане значення координати стану об’єкта керування;
- Хвих(t) – фактичне значення координати стану об’єкта керування;
- ε(t)- помилка керування;
-
 - елемент порівняння.
- елемент порівняння.
Помилка керування ε(t) являє собою різницю між заданим Y(t) і фактичним Хвих(t) значеннями керованої величини: ε(t)= Y(t) – Хвих(t) .
Розглянута система, завдяки наявності зворотного зв'язку, є замкнутою. Ця особливість істотно підвищує точність керування. Дійсно, керуюча частина, при наявності помилки керування ε(t), безупинно буде виробляти керуючий вплив U(t), спрямований на її усунення.
Однак, при суттєвому підвищенні точності, швидкодія системи нижча, ніж при використанні принципу керування по збуренню. Це обумовлено тим, що керуючий вплив починає змінюватися тільки після зміни помилки керування, тобто після того, коли вже відбулася зміна стану об'єкта. Через досить високу інерційність об'єкта керування реакція керуючої частини виявляється вповільненою.
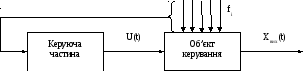
Б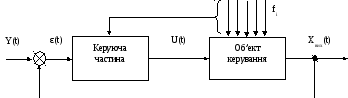 ільш
кращим єпринцип
комбінованого керування,
у якому в якості вихідної інформації
керуючої частини використовується
одночасно як величина збурення, так і
величина помилки керування.
ільш
кращим єпринцип
комбінованого керування,
у якому в якості вихідної інформації
керуючої частини використовується
одночасно як величина збурення, так і
величина помилки керування.
Такий принцип керування поєднує високу швидкодію, властиву принципу керування Понселе, і високу точність керування, якою володіють системи, реалізовані за принципом Уатта. Розімкнутий контур керування по збуренню забезпечує необхідну швидкодію, а замкнутий контур керування за помилкою усуває недоліки компенсації впливу збурення розімкнутим контуром.
Принцип комбінованого керування використовується в тих випадках, коли потрібні висока швидкодія й точність керування, однак, при цьому варто пам'ятати, що ускладнення структури неминуче приводить до зменшення надійності роботи системи керування у цілому.
На практиці найбільше поширення отримали системи, що реалізують принцип керування Уатта.
Функціональна схема системи автоматичного керування (САК)
На наведених структурних
схемах відбита загальна структура
системи керування, її основні складові,
зовнішні й внутрішні впливи, координата
стану об'єкта. Однак, крім перерахованого,
будь-яка система керування містить у
собі ще й різні функціонально необхідні
елементи, призначення яких визначається
необхідністю знімання, переробки й
передачі інформації. Більш детально
состав системи керування можна представити
на функціональній с хемі.
хемі.
Н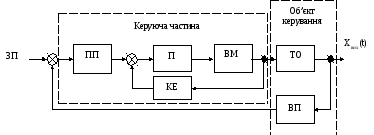 а
функціональній схемі прийняті умовні
позначення:
а
функціональній схемі прийняті умовні
позначення:
ЗП – задаючий пристрій;
ПП – перетворюючий пристрій;
П – підсилювач;
ВМ – виконавчий механізм;
КЕ – коригувальний елемент;
ТО – технологічний об'єкт;
ВП – вимірювальний пристрій;
 – елемент порівняння.
– елемент порівняння.
За допомогою задаючого пристрою ЗП формується вплив, що задає завдання щодо величини координати стану об’єкта для керуючої частини системи у вигляді певної фізичної величини (напруга, струм, тиск і т.д., залежно від виду енергії, що використовується для керування).
Вимірювальний пристрій ВП (сенсор) призначений в основному для перетворення значення координати стану об'єкта керування до виду сигналу зручному для передачі на відстань і порівняння із заданим значенням (завданням). Фізично ВП розташовується завжди усередині об'єкта, тому його розглядають як складову частину останнього, а тому математичний опис об'єкта керування виконується з урахуванням властивостей самого технологічного об’єкта (ТО) та вимірювального пристрою ВП.
Елемент порівняння(суматор), виконує операцію алгебраїчного додавання над фізичними величинами відповідними заданому значенню керованої величини і її фактичному значенню, віднімаючи фактичне значення керованої величини від заданого, тим самим визначаючи помилку керування.
Потужність сигналу, що відповідає помилці керування, часто виявляється недостатньою й вимагає відповідних перетворень і посилення, тому в складі керуючої частини системи є такі функціонально необхідні елементи як перетворюючий пристрій ПП й підсилювач П, які й виконують операції відповідно перетворення й посилення.
Посилений сигнал надходить на виконавчий механізм ВМ, що шляхом зміни положення регулювального органу здійснює необхідний вплив на об'єкт, змінюючи величину надходження в останній матеріального або енергетичного потоку. Незважаючи на те, що виконавчий механізм ВМ разом з регулювальним органом звичайно розташовані фізично поблизу об'єкта керування, при аналітичних розрахунках ВМ формально включають до складу керуючої частини системи керування.
Крім функціонально необхідних елементів у керуючій частині системи для поліпшення якості керування часто використають штучні коригувальні елементи КЕ, що вводять додатково. Введення коригувальних елементів утворює крім основного (головного), ще один, внутрішній, контур керування.
Класифікація автоматичних систем керування.
Класифікацію АСУ здійснюють за різними критеріями:
По характеру алгоритму функціонування: стабілізуючі, програмні, слідкуючі. Алгоритм функціонування - сукупність приписань, що визначають характер вимог до стану координат об'єкта.
У стабілізуючій системі керування алгоритм функціонування містить приписання підтримувати керовану величину протягом тривалого часу на постійному рівні. У такій системі задаючий вплив Y(t) по визначенню повинне бути постійним у часі, тобто Y = const.
Для програмної системи керування алгоритм функціонування містить приписання змінювати керовану величину по заздалегідь заданому закону (по програмі), тобто Y(t) = var.
У слідкуючий системі керування алгоритм функціонування містить приписання змінювати керовану величину в часі по заздалегідь невідомому закону (найчастіше випадково) залежно від змін деякої іншої величини. У цьому випадку задаючий вплив Y(t) немов би «стежить» за змінами цієї іншої величини, тобто Y(t) = stoh.
У принципі всі три різновиди вирішують одну й ту ж саму задачу: приведення керованої величини у відповідність із завданням, тому мають однакову структуру і з позицій методів дослідження вони не відрізняються один від іншого. Розходження полягає лише в характері самого завдання Y.
По властивостях у сталому режимі: статичні й астатичні системи керування.
Особливості цих систем наочніше розглянути на прикладах.
Н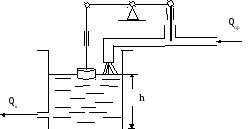 а
рисунку наведена спрощена схема статичної
системи автоматичного регулювання
рівня рідини в гідравлічному об'єкті.
а
рисунку наведена спрощена схема статичної
системи автоматичного регулювання
рівня рідини в гідравлічному об'єкті.
С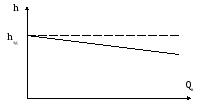 талий
режим у системі можливий при рівності
притоку Qпр.
і витрат рідини Qв,
тобто при Qпр. =
Qв.
Такий рівноважний стан установлюється
при різних значеннях Qв
і h, причому, чим більше Qр,
тим менше h.
талий
режим у системі можливий при рівності
притоку Qпр.
і витрат рідини Qв,
тобто при Qпр. =
Qв.
Такий рівноважний стан установлюється
при різних значеннях Qв
і h, причому, чим більше Qр,
тим менше h.
. Це означає, що стале значення керованої величини h залежить від величини зовнішнього збурюючого впливу Qв. Статичні системи забезпечують настання сталого режиму, але не забезпечують відповідність керованої величини заданому значенню. Таким чином, для статичних систем характерна наявність помилки керування в сталому режимі, що підтверджується вищенаведеним графіком залежності керованої величини h від зовнішнього впливу Qв.
Розглянемо астатичну систему:
Н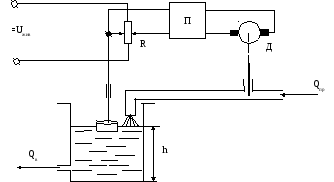 а
наведеному рисунку за допомогою правого
движка змінного опору R установлюютьзадане
значення рівня, положення ж лівого
движка визначається висотою підйому
поплавця, тобто фактичним
значенням рівня. Сталий
режим наступає тільки в одному єдиному
випадку, коли обидва движки змінного
опору R будуть перебувати навпроти один
одного, тобто коли фактичний рівень
рідини відповідатиме заданому рівню.
В іншому випадку, напруга, що знімається
з обох движків, посилена підсилювачем
П змусить серводвигун М обертатися, і
за допомогою регулюючого органа змінювати
величину притоку Qпр.;
система буде перебувати в перехідному
режимі. Таким чином, в
астатичній системі
забезпечується не тільки можливість
сталого режиму, але й, саме головне,
повна відповідність керованої величини
заданому значенню у
сталому режимі, тобто
помилка керування у
статиці дорівнює нулю.
а
наведеному рисунку за допомогою правого
движка змінного опору R установлюютьзадане
значення рівня, положення ж лівого
движка визначається висотою підйому
поплавця, тобто фактичним
значенням рівня. Сталий
режим наступає тільки в одному єдиному
випадку, коли обидва движки змінного
опору R будуть перебувати навпроти один
одного, тобто коли фактичний рівень
рідини відповідатиме заданому рівню.
В іншому випадку, напруга, що знімається
з обох движків, посилена підсилювачем
П змусить серводвигун М обертатися, і
за допомогою регулюючого органа змінювати
величину притоку Qпр.;
система буде перебувати в перехідному
режимі. Таким чином, в
астатичній системі
забезпечується не тільки можливість
сталого режиму, але й, саме головне,
повна відповідність керованої величини
заданому значенню у
сталому режимі, тобто
помилка керування у
статиці дорівнює нулю.
Графік залежності керованої величини h від зовнішнього впливу Qв в астатичних системах має вигляд:
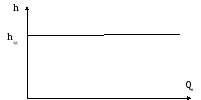
Астатичні системи мають високу статичну точність керування, але, при цьому, в таких системах у порівнянні зі статичними підвищується час перехідного процесу, коливальність процесу керування, мають місце значні динамічні відхилення керованої величини від сталого значення.
По наявності додаткового джерела енергії розрізняють системи керування прямої й непрямої дії. Так, у розглянутій статичній системі робота по переміщенню регулювального органа здійснюється за рахунок сили, що виштовхує поплавок, тобто за рахунок енергії об'єкта. Таку систему керування варто віднести до систем прямої дії. В астатичній системі регулювальний орган переміщується за допомогою двигуна Д, якому для його роботи, як і для вимірювальної схеми та підсилювачу П, необхідні додаткові незалежні джерела енергії. У цьому випадку маємо систему керування непрямої дії.
По наявності в системі елементів, що перетворюють безперервну інформацію в дискретну форму, системи керування діляться на безперервні та дискретні системи. Дискретні системи містять хоча б один елемент, вихідна величина якого приймає дискретні значення при плавній зміні вхідної величини. Існують різні способи дискретизації безперервної інформації за допомогою різних релейних елементів (квантування за рівнем), імпульсних елементів (квантування за часом), кодоімпульсних модуляторів (квантування за рівнем і за часом). При цьому функціональна схема повинна містити специфічні елементи, що дозволяють перетворювати характер інформації й обробляти перетворену інформацію по певному алгоритму. Наприклад:
Н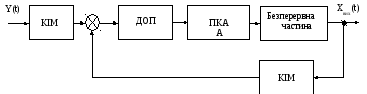 а
функціональній схемі прийняті позначення:
а
функціональній схемі прийняті позначення:
КІМ - кодоімпульсний модулятор;
ДОП - дискретний обчислювальний пристрій;
ПКА - перетворювач код-аналог;
Y(t) - завдання;
Xвих(t) - керована величина.
Якщо безперервна величина представлена у вигляді якого-небудь цифрового коду, то такі дискретні системи прийнята називати цифровими, у структурі цих систем звичайно є аналого-цифрові (АЦП) і цифро-аналогові (ЦАП) перетворювачі й цифровий обчислювальний пристрій (ЦОП).
По наявності нелінійних елементів системи діляться на лінійні й нелінійні системи. При цьому якщо в системі є хоча б один нелінійний елемент, то така система називається нелінійною. До нелінійних елементів відносять елементи системи, у яких у сталому режимі вихідна величина не прямо пропорційна вхідній величині.
По наявності місцевих зворотних зв'язків розрізняють одноконтурні й багатоконтурні системи керування.
Залежно від числа керованих величин системи бувають одномірні й багатомірні. При цьому багатомірні системи можуть бути системами зв'язаного й незв'язаного керування.
По функціональному призначенню системи класифікуються як системи автоматичного керування температурою, тиском, вологістю і т.і.
По виду енергії, яка використовується для керування, розрізняють електричні, пневматичні, гідравлічні, механічні й т.д. системи керування.